

Нулевой участок
Уравнение упругой линии нулевого участка вала, согласно выражению (2.3), записывается
![]() Первые
три производные
Первые
три производные

Краевые условия
на левом конце вала
![]()
![]()
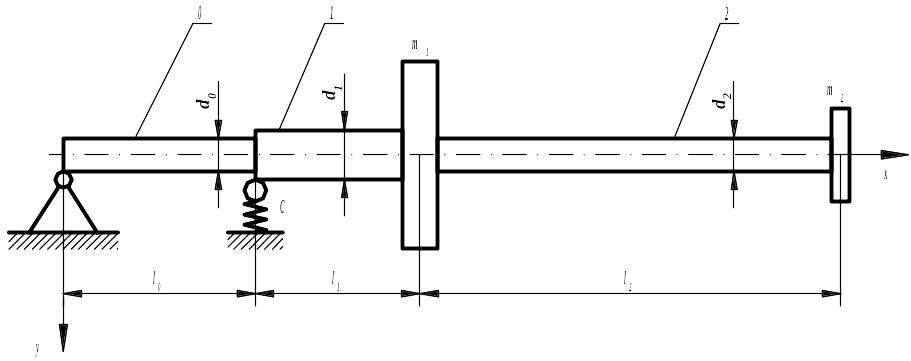
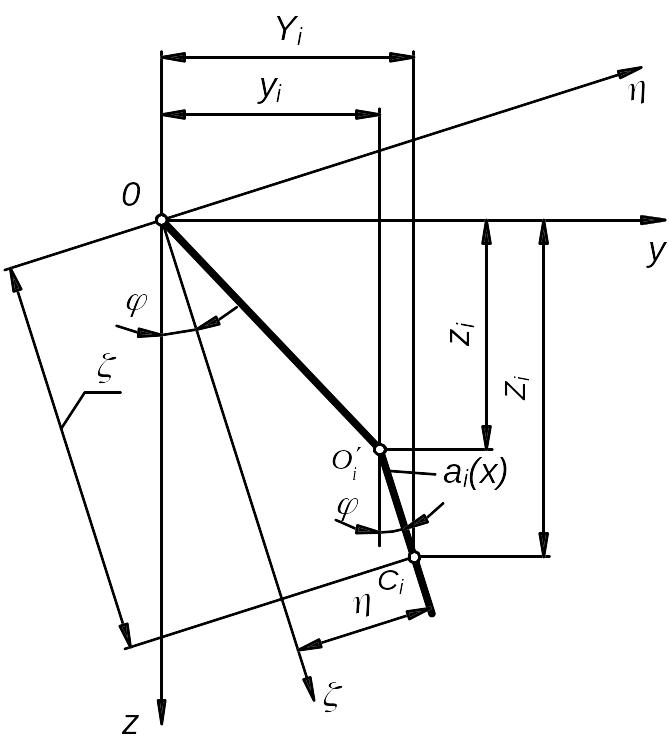
Рисунок 9 – Расчетная схема вала
Тогда
![]() и при
и при
![]() имеем:
имеем:
 (2.4)
(2.4)
где
Первый участок
Уравнение упругой линии первого участка и его первые три производные:
 (2.5)
(2.5)
Условия сопряжения нулевого и первого участков вала:
 (2.6)
(2.6)
Подставляя выражения
(2.5) при
![]() и (2.4) в условия сопряжения (2.6), найдем
постоянные интегрирования первого
участка вала:
и (2.4) в условия сопряжения (2.6), найдем
постоянные интегрирования первого
участка вала:
 (2.7)
(2.7)
где
С учетом выражений
(2.7) уравнение упругой линии первого
участка вала и его первые три производные
при
![]() запишутся:
запишутся:
 (2.8)
(2.8)

Второй участок
Уравнение упругой линии второго участка вала и его первые три производные:
 (2.9)
(2.9)
Условия сопряжения первого и второго участков вала:
 (2.10)
(2.10)
где
![]() эксцентриситет
массы
эксцентриситет
массы
![]() .
.
Подставляя выражения (2.9) при и (2.8) в условиях сопряжения (2.10), найдем постоянные интегрирования второго участка вала.
 (2.11)
(2.11)
где
![]()
С учетом выражений (2.11) уравнение упругой линии второго участка вала и его первые три производные при запишутся:
где

Краевые условия на правом конце вала:
 (2.13)
(2.13)
где
![]() эксцентриситет
массы
эксцентриситет
массы
![]() .
.
Подставляя выражения
(2.12) в условия сопряжения (2.13), получим
два неоднородных алгебраических
уравнения с неизвестными
![]() :
:
![]() (2.14)
(2.14)
где
![]()
![]()
![]()
![]()
![]()
![]()
Из уравнений (2.14) определяем постоянные интегрирования нулевого участка :
![]()
![]()
Прогибы вала в
сечениях
![]() запишутся:
запишутся:
![]()
![]()
![]() (2.15)
(2.15)
![]() .
.
Реакции опор в
сечениях вала
![]() соответственно
соответственно
![]() (2.16)
(2.16)
Изгибающие моменты в сечениях вала :

![]()
![]()
 (2.17)
(2.17)
![]()
Таким образом, с помощью полученных зависимостей (2.15) – (2.17) могут быть определены форма упругой линии вала, реакции опор и найдены опасные сечения вала при любой скорости его вращения.
2.2 Нестационарный режим вращения
Рассмотрение вынужденных изгибных колебаний вала при нестационарном режиме вращения позволяет решить следующие вопросы:
1) рассчитать резонансные амплитуды и определить необходимые зазоры между вращающимися и неподвижными деталями машин (для гибких валов). Знание максимальных амплитуд колебаний вала имеет первостепенную важность в тех случаях, когда по технологическим или другим соображениям зазоры между вращающимися и неподвижными деталями машины должны быть минимальными.
2) оценить реакции опор и напряжения, развивающиеся в опасных сечениях вала при переходе через резонанс, что особенно важно при многократных пусках и остановках вала.
2.2.1 Краткий обзор состояния вопроса
Исследование поведения механических систем при нестационарном переходе через резонансное или критическое состояние развивается, в основном, по следующим направлениям:
- линейная постановка задачи при заранее предписанном законе изменения частоты возмущающей силы;
- нелинейная постановка задачи при заранее предписанном законе изменения частоты возмущающей силы;
- источник энергии и колебательная система рассматриваются как единая, автономная система, в которой имеет место обратная связь. В этом случае частота возмущающей силы зависит от источника энергии, свойств колебательной системы и её поведения в процессе колебаний.
Наиболее полно рассмотрены нестационарные колебания линейных механических систем. Линейные системы являются наиболее простыми моделями реальных объектов и позволяют применить линейную теорию. Нелинейные системы – это широкий класс систем, которые наиболее правильно моделируют реальные объекты. Теория нелинейных колебаний использует очень сложный математический аппарат, поэтому для исследования характера колебаний нелинейных систем обычно прибегают к различным приемам линеаризации. Однако при исследовании существенно нелинейных систем, когда линеаризация принципиально невозможна, применяются специальные методы решения: численное интегрирование, использование аппарата специальных функций, моделирующие устройства, ЭВМ.
Следует отметить, что задачи о нестационарных колебаниях даже в самых простейших случаях отличаются большой математической сложностью. Так, если вращающийся вал может быть приведен к линейной системе с одной степенью свободы (в предположении, что источник энергии обладает достаточно большой мощностью), то решение задачи сводится к интегрированию дифференциального уравнения
![]() (2.18)
(2.18)
где |
|
- |
линейное перемещение; |
|
|
- |
коэффициент, характеризующий затухание; |
|
|
- |
частота свободных колебаний; |
|
|
- |
амплитуда возмущающей силы, отнесенная к единице мас- |
сы системы; |
|||
![]() здесь
здесь
![]() скорость
изменения частоты
скорость
изменения частоты
![]() ,
,
![]()
Интеграл дифференциального уравнения (2.18):
![]() (2.19)
(2.19)
где
![]()
Прохождение через резонанс линейной системы с одной степенью свободы посвящены работы Н.Г. Горчакова, А.М. Каца, Б.Г. Коренева, А.Д. Мышкиса, Я.Г. Пановко, А.П. Филиппова и других авторов.
Имеется целый ряд работ, относящихся к анализу переходных процессов в линейных системах с конкретной механической интерпретацией, в частности, большое внимание уделяется изучению колебаний валов в нестационарном режиме. Это работы В.А. Гробова, А.А. Гусарова, П.Л. Капицы, И.Ш. Неймана, Н.А. Пикулева, О.Н. Романива, А.А. Смелкова, К.Т. Шаталова, И.С. Шейнина и других авторов.
В работе Ф.М. Диментберга /3/ исследуется вопрос о соотношении переменной и «постоянной» (медленно изменяющейся во времени) составляющих прогиба вала с диском посередине на жестких и упруго-податливых опорах. Выясняется роль податливости опор. Автор получает решения без учета и с учетом внешнего вязкого трения, представленные через интегралы Френеля действительного аргумента.
Дальнейшим развитием вопроса о нестационарных колебаниях механических систем явилась работа Е.Г. Голоскокова и А.П. Филиппова /1/, в которых подробно рассматривается прохождение через резонанс системы с одной степенью свободы в режимах разгона и выбега при действии возмущающих сил различного характера, с учетом и без учета сил трения. Полученные решения распространяются на случай систем с конечным числом степеней свободы и с распределенными параметрами.
Наряду с развитием теории линейных колебаний за последнее время значительное развитие получили приближенные методы исследования нестационарных колебаний в нелинейных системах, основывающиеся на асимптотических методах нелинейной механики.
Следует особо подчеркнуть важность исследований Ю.А. Митропольского по теории нестационарных колебаний нелинейных систем, обобщенных в монографии /7/. Развивая идеи асимптотических методов нелинейной механики, созданных Н.М. Крыловым и Н.Н. Боголюбовым, автор разработал достаточно общий метод исследования нестационарных колебаний в нелинейных системах с медленно изменяющимися параметрами.
Идеи асимптотических методов используются в работах В.А. Гробова /2/, Е.Г. Голоскокова и А.П. Филиппова /1/ и других авторов.
В.О. Кононенко /4/ положил начало новому разделу в исследованиях нестационарных колебаний механических систем с ограниченным возбуждением. Автором излагаются основные особенности поведения систем с ограниченным возбуждением, исследуются энергетические соотношения, вносимые связностью с двигателем. Для изучения взаимодействия колебательных систем с источником энергии широко использовалось электромоделирование.
Поведение систем с ограниченным возбуждением в дальнейшем рассматривалось в работах Э.А. Аграновской, Е.Г. Голоскокова, С.С. Кораблева, Л.А. Растригина. А.П. Субача и других авторов.
2.2.2 Решение линейной задачи
Анализ конструкций машин и аппаратов, применяемых в химической промышленности, показывает, что во многих случаях вращающиеся валы могут быть рассмотрены как линейные системы с распределенными параметрами.
Наиболее подробно решение такой задачи приведено в работе /17/ на примере разгона вала цетрифуги, расчетная схема которого приведена на рисунке 9.
Переход вала через
критическую скорость рассматривается
в предположении, что угловая скорость
возрастает по заранее предписанному
линейному закону
![]() ,
не зависящему от поперечных колебаний
системы. Как известно, этот случай
соответствует наличию в системе источника
энергии, обладающего неограниченным
запасом мощности. Характеристика упругой
опоры принимается изотропной и линейной
с коэффициентом жесткости
.
Силы внешнего трения принимаются
пропорциональными скорости перемещения
вала, силы внутреннего трения не
учитываются. После изготовления и сборки
вал имеет изогнутость
,
не зависящему от поперечных колебаний
системы. Как известно, этот случай
соответствует наличию в системе источника
энергии, обладающего неограниченным
запасом мощности. Характеристика упругой
опоры принимается изотропной и линейной
с коэффициентом жесткости
.
Силы внешнего трения принимаются
пропорциональными скорости перемещения
вала, силы внутреннего трения не
учитываются. После изготовления и сборки
вал имеет изогнутость
![]() Между опорами изогнутость
Между опорами изогнутость
![]() вала изменяется по синусоидальному
закону, а на консоли изогнутость
вала изменяется по синусоидальному
закону, а на консоли изогнутость
![]() по
линейному, то есть
по
линейному, то есть
![]()
Массы
![]() имеют остаточную неуравновешенность,
характеризуемую соответственно
эксцентриситетами
имеют остаточную неуравновешенность,
характеризуемую соответственно
эксцентриситетами
![]() Предполагается, что векторы эксцентриситетов
распределенных и сосредоточенных масс
на каждом участке вала лежат в одной
плоскости и направлены в одну сторону,
то есть рассматривается худший возможный
случай.
Предполагается, что векторы эксцентриситетов
распределенных и сосредоточенных масс
на каждом участке вала лежат в одной
плоскости и направлены в одну сторону,
то есть рассматривается худший возможный
случай.
Неподвижные оси
координат -
,
подвижные -
![]() ;
точка
;
точка
![]() центр
вала, точка
центр
вала, точка
![]() центр
тяжести сечения вала (рисунок 10).
центр
тяжести сечения вала (рисунок 10).
Проекции прогиба
вала на неподвижные оси координат
![]() отыскиваются
в виде:
отыскиваются
в виде:
![]()
(2.20)
![]()
если отношение их массы к массе ротора не превышает 0,005. В противном случае их масса приводится к массе ротора;
где |
|
|
- функции времени; |
|
|
|
- собственная функция -го участка вала -й частоты. |
Рисунок
10 – Схема прогиба вращающегося вала в
сечении
![]()
1) Определение собственных функций
Дифференциальное
уравнение для определения собственных
функций
![]() вала имеет вид, аналогичный уравнению
(1.1) /5, 17/.
вала имеет вид, аналогичный уравнению
(1.1) /5, 17/.
![]() (2.21)
(2.21)
где
![]() здесь
здесь
![]() собственная
частота
-го
порядка.
собственная
частота
-го
порядка.
В случае многоопорного вала переменного сечения собственные функции участков вала целесообразно находить методом начальных параметров, что позволяет получить довольно простые, удобные для практических расчетов выражения.
Собственные функции вала:
- на нулевом участке
![]()
- на первом участке
![]()
- на втором участке
![]()
Рассматривая, как и прежде, краевые условия на концах вала, а также условия сопряжения между участками, получим следующие выражения для собственных функций вала:
Нулевой участок
![]() (2.22)
(2.22)
![]() (2.23)
(2.23)
где
![]() ,
здесь
,
здесь





![]()









где
![]()
Первый участок
![]() (2.24)
(2.24)
![]() (2.25)
(2.25)
где
![]()
![]()

Второй участок
![]() (2.26)
(2.26)
![]() (2.27)
(2.27)
где
![]()
![]()



В выражения
собственных функций
![]() входит неизвестная постоянная
интегрирования
входит неизвестная постоянная
интегрирования
![]() нулевого
участка. При дальнейших выкладках эта
величина сокращается и не препятствует
получению решения в замкнутом виде.
нулевого
участка. При дальнейших выкладках эта
величина сокращается и не препятствует
получению решения в замкнутом виде.
2) Определение
функций времени
![]()
Для определения
функций
![]() используются уравнения Лагранжа
используются уравнения Лагранжа
![]()
(2.28)
![]()
![]() кинетическая
энергия вращающегося вала;
кинетическая
энергия вращающегося вала;
![]() потенциальная
энергия изогнутого вала и деформированной
упругой опоры;
потенциальная
энергия изогнутого вала и деформированной
упругой опоры;
![]() обобщенные
силы внешнего трения, отнесенные к
координатам
;
обобщенные
силы внешнего трения, отнесенные к
координатам
;
![]() обобщенные
силы внутреннего трения, отнесенные к
тем же координатам.
обобщенные
силы внутреннего трения, отнесенные к
тем же координатам.
Кинетическая энергия вращающегося вала /1, 3, 17/:

(2.29)
![]()
где
![]() проекции
перемещения центра тяжести произвольного
сечения
-го
участка вала на неподвижные оси координат
,
проекции
перемещения центра тяжести произвольного
сечения
-го
участка вала на неподвижные оси координат
,
![]()
![]()
![]() проекции перемещений
центров тяжести сосредоточенных масс
проекции перемещений
центров тяжести сосредоточенных масс
![]() на неподвижные оси
.
на неподвижные оси
.
![]()
![]()
![]()
![]()
![]() полярные
моменты инерции масс
полярные
моменты инерции масс
![]()
Потенциальная энергия изогнутого вала и деформированной упругой опоры /5,17/:
 (2.30)
(2.30)
где
![]() -
кривизна упругой линии вала,
-
кривизна упругой линии вала,
![]()
При определении обобщенных сил трения считается, что внутреннее трение не способствует ограничению амплитуд при переходе вала через критические скорости /1/.
Механическое объяснение этого факта сводится к тому, что в резонансной зоне упругая линия вала, изогнутого центробежными силами от неуравновешенности распределенных и сосредоточенных масс, вращается вокруг линии опор и при этом не происходит вращения вала «внутри» упругой линии, нет перемен знаков напряжений и, следовательно, внутреннее трение практически отсутствует, то есть можно принять
![]()
Силы внешнего
трения возникают главным образом в
опорах и принимаются пропорциональными
скорости перемещения вала. В этом случае
проекции внешних сил на координатные
оси
![]() записываются соответственно в следующем
виде /5, 17/:
записываются соответственно в следующем
виде /5, 17/:
в жесткой опоре
![]()
в упругой опоре
![]()
где
![]() и
и
![]() коэффициенты
пропорциональности, определяемые
опытным путем.
коэффициенты
пропорциональности, определяемые
опытным путем.
Тогда обобщенные
силы внешнего трения
![]() с учетом выражений (2.20) будут:
с учетом выражений (2.20) будут:
![]()
(2.31)
![]()
Подставляя выражения (2.29) – (2.31) в уравнения Лагранжа (2.28), получим два дифференциальных уравнения:
![]()
(2.32)
![]()
где

Подставляя значения
собственных функций
![]() в выражения для
в выражения для
![]() и
и
![]() ,
после интегрирования и ряда преобразований
получим:
,
после интегрирования и ряда преобразований
получим:
 ,
,

где
![]() распределенные
массы нулевого, первого и второго
участков вала,
распределенные
массы нулевого, первого и второго
участков вала,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Интегралы уравнений (2.32) при нулевых начальных условиях запишутся соответственно:
 (2.33)
(2.33)
 (2.34)
(2.34)
где
![]()
Интегрируя по
частям уравнения (2.33) и (2.34), получим для
![]() следующие выражения:
следующие выражения:
![]()
(2.35)
![]()
![]() (2.36)
(2.36)
где
![]()
![]()
![]()
![]()
здесь
![]()
Интегралы
![]() могут быть выражены через интегралы
Френеля или интегралы Жильбера
комплексного аргумента. Однако более
простым является решение через интегралы
вероятностей комплексного аргумента
/1/. Для этого делается переход к
интегрированию в комплексной области.
Показательные функции
могут быть выражены через интегралы
Френеля или интегралы Жильбера
комплексного аргумента. Однако более
простым является решение через интегралы
вероятностей комплексного аргумента
/1/. Для этого делается переход к
интегрированию в комплексной области.
Показательные функции
![]() принимаются в качестве аналитического
продолжения функций
принимаются в качестве аналитического
продолжения функций
![]() на плоскость комплексного переменного,
то есть
на плоскость комплексного переменного,
то есть
![]()
![]()
(2.37)
![]()
![]()
где
![]()
Далее
![]() в выражениях (2.37) по тождествам Эйлера
представляются в виде показательных
функций. Множители, не зависящие от
в выражениях (2.37) по тождествам Эйлера
представляются в виде показательных
функций. Множители, не зависящие от
![]() выносятся
за знак интеграла и вместо
вводятся
новые переменные /1,17/:
выносятся
за знак интеграла и вместо
вводятся
новые переменные /1,17/:
для интегралов
![]()
![]()
для
интегралов
![]()
![]()
Для интеграла
![]() имеем
следующее решение /1/:
имеем
следующее решение /1/:
![]() (2.38)
(2.38)
где
![]()

здесь
![]() интегралы
вероятностей комплексного аргумента,
для которых имеются подробные таблицы
/18/;
интегралы
вероятностей комплексного аргумента,
для которых имеются подробные таблицы
/18/;
![]() значения
значения
![]() при
при
![]()
![]() соответственно
действительная и мнимая части
соответственно
действительная и мнимая части
![]() .
.
Аналогично для
интегралов
![]() имеем
решения /17/:
имеем
решения /17/:
![]() (2.39)
(2.39)
где
![]()

![]() (2.40)
(2.40)
где
![]()
Здесь
![]() значения
значения
![]() при
при
![]() ,
,

![]() (2.41)
(2.41)
где
![]()

Подставляя выражения (2.38) и (2.39) в (2.35), а выражения (2.40) и (2.41) в (2.36), получим окончательно
![]()
![]()
![]()
![]()
Результирующий прогиб на -ом участке вала определяется по формуле
![]()
Изгибающие моменты
и поперечные силы на
-ом
участке вала, если на нем не приложены
внешние моменты и силы, в проекциях на
координатные оси
![]() и
определяются
соответственно из следующих выражений:
и
определяются
соответственно из следующих выражений:
![]()
![]()
![]()
![]()
где
![]()
![]()
Результирующие изгибающие моменты и поперечные силы на -ом участке вала
![]()
![]()
Полученные расчетные зависимости позволяют исследовать переход вала через критические скорости любого порядка с учетом влияния как высших, так и низших гармоник.
Например, для вала,
представленного на рисунке 9, при переходе
через первую критическую скорость с
учетом влияния второй гармоники прогибы
в сечениях вала
![]() определяются из следующих выражений:
определяются из следующих выражений:
![]()
![]()
![]()
где
![]() функции
времени, определяемые из условия, что
вал с формой колебаний, соответствующей
второй гармонике, проходит через первую
критическую скорость;
функции
времени, определяемые из условия, что
вал с формой колебаний, соответствующей
второй гармонике, проходит через первую
критическую скорость;
![]() собственные
функции соответственно нулевого, первого
и второго участков вала, соответствующие
первой гармонике;
собственные
функции соответственно нулевого, первого
и второго участков вала, соответствующие
первой гармонике;
![]() собственные
функции нулевого, первого и второго
участков вала, соответствующие второй
гармонике.
собственные
функции нулевого, первого и второго
участков вала, соответствующие второй
гармонике.
Аналогично могут быть найдены величины изгибающих моментов и поперечных сил в любом сечении.
Пример. Рассчитать нестационарный режим изгибных колебаний вала центрифуги, расчетная схема которого приведена на рисунке 9.
Исходные данные:
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При переходе через
первую критическую скорость
![]() с ускорением
с ускорением
![]() получены с помощью ЭВМ максимальные
значения прогибов и изгибающих моментов
в пяти сечениях вала, а также реакции
опор (
получены с помощью ЭВМ максимальные
значения прогибов и изгибающих моментов
в пяти сечениях вала, а также реакции
опор (![]() в
жесткой шарнирной,
в
жесткой шарнирной,
![]() в упруго-податливой), приведенные в
таблице 2.
в упруго-податливой), приведенные в
таблице 2.
Таблица 2 – Результаты расчетов
Вычисляемые параметры |
Координата х сечения вала |
|||||
0 |
|
|
|
|
|
|
Прогиб
|
0 |
0,160 |
0,350 |
0,765 |
1,655 |
2,656 |
Изгибающий
момент
|
0 |
107,1 |
214,8 |
85,2 |
26,6 |
0 |
Реакция опоры
|
790 |
- |
1400 |
- |
- |
- |
Момент резонанса
![]()
Литература
1 Голоскоков Е.Г., Филиппов А.П. Нестационарные колебания механических систем. – Киев: Наукова думка, 1966. – 336 с.
2 Гробов В.А. Асимптотические методы расчета изгибных колебаний валов турбомашин. – М.: Изд-во АН СССР, 1961. – 166 с.
3 Диментберг Ф.М. Изгибные колебания вращающихся валов. – М.: Изд-во АН СССР, 1959. – 247 с.
4 Кононенко В.О. Колебательные системы с ограниченным возбуждением. – М.: Наука, 1964. – 254 с.
5 Кущуль М.Я. Автоколебания роторов. – М.: Изд-во АН СССР, 1963. – 167 с.
6 Маслов Г.С. Расчеты колебаний валов. Справочник. – М.: Машиностроение, 1980. – 151 с.
7 Митропольский Ю.А. Проблемы асимптотической теории нестационарных колебаний. – М.: Наука, 1964. – 431 с.
8 Пановко Я.Г. Основы прикладной теории упругих колебаний. – М.: Машиностроение, 1967. – 316 с.
9 Филиппов А.П. Колебания деформируемых систем. – М.: Машиностроение, 1970. – 736 с.
10 Крылов А.Н. Об определении критических скоростей вращающегося вала. – Л.: Изд-во АН СССР, 1932. – 31 с.
11 Щеглов А.А. К вопросу определения критических скоростей вала переменного сечения. – В.кн.: Расчеты на прочность. – М.: Машгиз, 1960, вып. 5, с. 273-299.
12 Фаддеева В.Н., Гавурин М.К. Таблицы функций Бесселя целых номеров. –М. – Л.: Гостехтеориздат, 1950. – 439 с.
13 Соколовский В.И., Митрофанов Ю.А., Борисов Б.Р. О применении метода обобщенного анализа к исследованию критических скоростей валов. – Изв. вузов. Машиностроение, 1969, №8, с. 51-55.
14 Соколовский В.И., Митрофанов Ю.А., Борисов Б.Р. О выборе жесткости упругой опоры консольных валов центрифуг. – В.кн. : Проблемы машиностроения. Челябинск, Изд-во ЧПИ, 1973, с.3-14.
15 Борисов Б.Р., Митрофанов Ю.А. К определению критических скоростей и амплитуд колебаний валов центрифуг. – В кн.: Исследования кинематики и динамики машин. Свердловск, Изд-во УПИ, 1970, с. 129-135.
16 Ананьев И.В. Справочник по расчету собственных колебаний упругих систем. – М. – Л.: Гостехиздат, 1946. – 223 с.
17 Борисов Б.Р., Митрофанов Ю.А., Пенцов В.М. Исследование вынужденных изгибных колебаний вала центрифуги при нестационарном режиме вращения. – В.кн.: Динамика и прочность машин. – Харьков, Изд-во ХГУ, 1973, с. 15-51.
18 Фаддеева В.Н., Терентьев Н.М. Таблицы значений интеграла вероятностей от комплексного аргумента. – М.: Гостехиздат, 1954. – 268 с.