

3.2.2.2. Компенсаторы наклона
В настоящее время широкое применение находят геодезические приборы (нивелиры, теодолиты и др.), в которых уровень заменяется автоматическим устройством – компенсатором наклона визирной оси, или «регулятором» положения визирной оси. Нивелир снабжается только круглым уровнем для грубого приведения визирной оси в горизонтальное положение, горизонтальность линии визирования обеспечивается с необходимой точностью автоматическим компенсатором наклона. Компенсаторы наклона позволяют повысить точность и производительность труда, дают возможность работать на неустойчивых грунтах. Сущность работы компенсатора заключается в следующем.
а





 А
А
 С0
С0
f
б

А




 γ С1
γ С1


 В β
В β
 S
S



 f С0
f С0
в
 В S С1
В S С1
 γ β
γ β
С0
f
Рис. 30. Сущность работы компенсатора
При горизонтальном положении визирной оси трубы по средней нити сетки производят правильный отсчет А (рис. 30), соответствующий горизонту инструмента. При наклоне зрительной трубы на угол γ горизонтальный луч, соответствующий отсчету А, смещается вверх или вниз относительно средней нити сетки на величину С0С1=∆=f∙sinγ≈f∙γ/ρ". Для того, чтобы отсчет А по средней нити сетки не изменялся, нужно либо изменить положение сетки нитей из положения С0 в С1 (механический компенсатор, рис.30, б), либо изменить направление горизонтального луча, соответствующего отсчету А так, чтобы этот луч снова попал на среднюю нить сетки (оптико-механический компенсатор, рис. 30, в).
Смещение сетки нитей или изменение положения визирного луча осуществляется с помощью расположенного в точке В специального устройства – компенсатора наклона зрительной трубы на величину ∆=S∙sinβ. Отсюда следует основное уравнение компенсации
f∙sinγ=S∙sinβ. (44)
Существует еще одна группа компенсаторов – жидкостные, основанные на свойстве поверхности жидкости под действием силы тяжести устанавливаться нормально к отвесной линии. В геодезических приборах жидкостные компенсаторы применяют редко. Они действуют также по схеме оптико-механических компенсаторов. Угол β отклонения луча и местоположение точки В рассчитываются таким образом, чтобы удовлетворялось основное уравнение компенсации. Отношение f/S=β/γ=n называется угловым увеличением компенсатора. Для того, чтобы геометрические размеры компенсатора были невелики, точку В стремятся расположить внутри зрительной трубы (n≥1).
Компенсаторы наклона содержат подвижный элемент, находящийся в определенном положении под действием силы тяжести, неподвижный оптический элемент (например, отклоняющую призму) и демпфирующее устройство (демпфер) воздушного или магнитного типа. Жидкостные демпферы не используются в нивелирах с компенсатором.
В геодезии наиболее широко применяются оптико-механические компенсаторы маятникового типа, которые, в свою очередь, подразделяются на линзовые, зеркальные, призменные. В мире выпущено более 70 типов компенсаторов, поэтому вышеприведенное разделение на виды весьма условно.
Все компенсаторы можно сгруппировать в соответствии с их расположением в нивелире:
-с компенсатором перед объективом – НСМ2А (СССР);
-с подвижным объективом или сеткой нитей – Сальмойраш 5172 и 5173 (Италия);
-с компенсатором между основным и фокусирующим компонентами телеобъектива – Ni-002 (ГДР), Ni-А31 (ВНР), Никон (Япония) и др.;
-с компенсатором между фокусирующей линзой и сеткой нитей – Ni-025, Ni-007 (ГДР), Ni-В3 (ВНР), НС3 (СССР) и др.;
-с компенсатором, служащим фокусирующим компонентом – Н-10КЛ.
Механическим компенсатором является качающаяся сетка на трех металлических нитях, имеющая длину, равную f (f=S, n=1). Под действием силы тяжести перекрестие сетки нитей занимает такое положение, что визирная ось системы отвесна (нивелир 5190 фирмы «Филотехника Сальмораж», Италия).
Наиболее часто используются оптико-механические компенсаторы в виде свободно подвешенных зеркал, призм, линз. Если зеркало подвесить на маятнике так, чтобы оно составляло с горизонтальной плоскостью всегда одинаковый угол, то его можно использовать в качестве компенсатора, у которого f=2S, следовательно, n=2.
В ряде приборов, например, в нивелире завода «Аскания», подвешенное зеркало компенсатора располагается между объективом и сеткой нитей.
Наиболее широко в нивелирах применяются призменные компенсаторы. В частности, отечественный нивелир Н-3К (НС3) снабжен призменным компенсатором оптико-механического типа, обеспечивающим автоматическую компенсацию наклона зрительной трубы в пределах ±15'. Зрительная труба нивелира ломаная, ее оптическая схема приведена на рисунке.
Принцип действия оптико-механического компенсатора показан на рис. 31. Здесь: при горизонтальном положении визирная ось проходит через точку П на рейке, центр объектива (главную точку Н объектива) и перекрестие сетки нитей С. Однако, во время работы с прибором зрительная труба может наклониться на угол γ, поэтому отсчет П будет смещен относительно перекрестия сетки нитей и составит П1.
Компенсатор, установленный в точке К, приводит изображение точки П автоматически в перекрестие сетки нитей С,. При этом выполняется основное уравнение компенсации (44). Из геометрии видно, что:
f sin = S sin
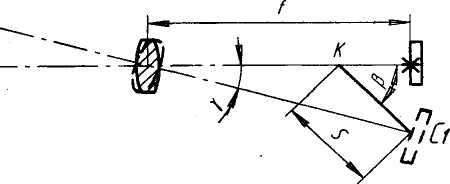

Рис. 31. Схема оптико-механического компенсатора
При расчетах схем компенсаторов, из-за малого значения углов и , используют уравнение вида:
(45)
= S
Чтобы получить необходимый для компенсации угол при наклоне зрительной трубы на угол , в большинстве случаев используют маятниковые системы подвески компенсаторов, и которых оптическая деталь (призма, зеркало или линза) подвешена или на тонких бериллиевых нитях, модуль нормальной упругости которых равен 31000 кг/мм2, или на плоской пружине (как в нивелирах НИК-2 и НИК-2М).
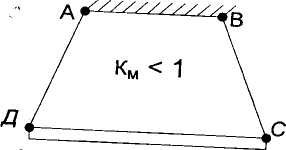
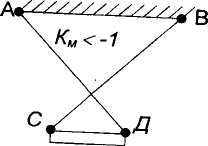
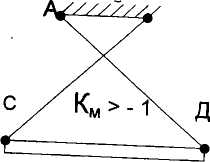
И настоящее время известны схемы нитяных подвесок компенсаторов, изображенные на рис. 32. На схемах приведен коэффициент механической компенсации Км = /.
В общем случае для схем подвесок, приведенных на рис. 32, получена приближенная формула для расчета Км в зависимости от геометрических размеров подвески и положения цетра тяжести:
Км= 4ab 2c/4b 2c 2+c(a-c)3+4hL(a-c)2 , (46)
где а = АВ, с=СД, в =АД=ВС – для подвесок на параллельных нитях и виде трапеции, в= АС= ДВ – для подвесок на скрещивающихся нитях; h - расстояние между основанием СД подвески и корпусом АВ,
 (47)
(47)
L - расстояние от центра тяжести подвешенной части до основания СД (положительно, если центр тяжести находится ниже основания СД, отрицательно, если центр тяжести выше основания СД). Знак " + " в формуле (2) соответствует подвескам на параллельных нитях, знак " - " – подвескам на скрещивающихся нитях.
 в
г
в
г
В В
е
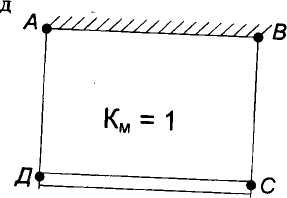
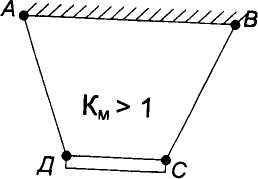
Рис. 32. Схемы нитяных подвесок компенсаторов:
а, в, г - обратный шарнирный четырехугольник;
б, д, е - прямой шарнирный четырехугольник
В соответствии с уравнением (44) работает и схема с жидкостным компенсатором, приведенная на рис. 33.
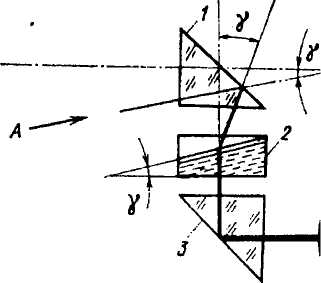
Рис. 33. Принципиальная схема работы жидкостного компенсатора:
1,3 - призмы АР-90"; 2 - кювета с жидкостью, содержащей 1,4-1,8%
этилового спирта и 98,6-98,2% бензилацетата
Преимущество схемы состоит в том, что она может стабилизировать ось в пространстве сразу по двум координатам. Жидкостной компенсатор используют в лазерных нивелирах, приборах вертикального проектирования и электронных тахеометрах.
Рассмотрим принципиальную схему с линзовым компенсатором (рис. 34).
Компенсатор представляет собой положительную 2 и отрицательную 1 линзы. Линза 1 жестко скреплена со штангой 3, подвешенной на нитях. Линза 2 закреплена в оправе объектива.
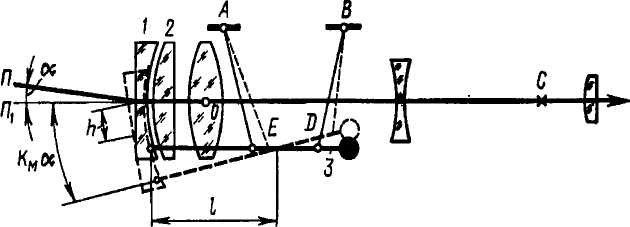
Рис .34. Принципиальная схема с линзовым компенсатором
Линзы компенсатора имеют фокусные расстояния, отличающиеся между собой на значение зазора между ними, что позволяет не нарушать телескопичность зрительной трубы при смещении отрицательной линзы компенсатора.
Уравнение компенсации для этой схемы имеет вид:
/l=a/b=KK’=Kм (48)
где f - фокусное расстояние объектива; а = АВ - расстояние между точками закрепления нитей к трубе; b= ED - расстояние между точками закрепления к рычагу 3; l - расстояние от главной точки подвижной линзы компенсатора до середины между точками Е и Д крепления нитей к рычагу 3; K' - постоянный коэффициент, зависящий от упругости нитей, нагрузки на них и положения центра тяжести нагрузки; Км = /= 2,3 -коэффициент механической компенсации.
Схема с линзовым компенсатором использована в нивелире НСМ-2А.
На рис. 35 приведена принципиальная схема нивелира Ni-007 предприятия "Карл Цейс" с компенсатором маятникового типа. Умножительная призма 5 при наклоне зрительной трубы на угол g смещает визирный луч на значение = , уравнение компенсации для данного компенсатора имеет вид:
l=’/2, (49)
где l - длина маятника.
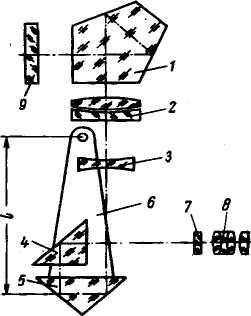
Рис. 35. Принципиальная схема нивелира Ni-007:
1 - пентапризма; 2 - объектив; 3 - фокусирующая линза; 4 - призма-крыша
(служит для получения прямого изображения); 5 - призма БР-180";
6 - маятник; 7 - сетка нитей; 8 - окуляр; 9 - защитное стекло.
Оптическая схема отсчитывания по лимбу не показана
Диапазон работы такого компенсатора порядка ±10'. Поворачиваемая пентапризма 1 служит оптическим микрометром.
На рис. 36 показаны принципиальная схема и принцип работы призменного компенсатора, подвешенного на бериллиевых нитях
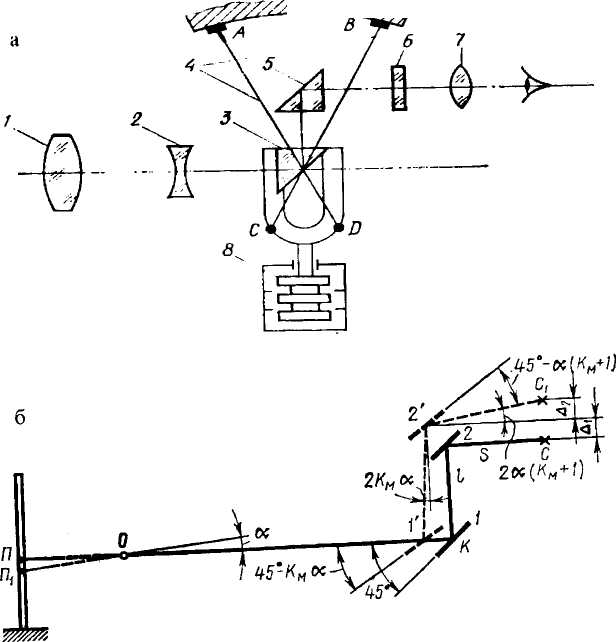
Рис. 36. Принципиальная схема (а) и схема действия (б)
призменного компенсатора:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор;
4 - бериллиевые нити; 5 - призма АР-90°; 6 - сетка нитей; 7 - окуляр;
8 - воздушный демпфер
Эту схему используют в точных нивелирах типа Н-3К. Здесь Км < -1. При наклоне зрительной трубы на угол g перекрестие сетки нитей С смещается в положение С1. Компенсатор сдвигает изображение правильного отсчета П в новое положение перекрестия сетки нитей на значение
= 1 + 2 (50)
Полагают, что, из-за малости угла наклона , изменение расстояний l и S мало, и записывают уравнение компенсации в виде:
’ =2lKM + 2S(KM+1)
или
KM = -2S/2(l+S)
Задаваясь значениями , S и l, вычисляют геометрические размеры подвески компенсатора. Для нивелира Н-ЗК значения Км = 2,62:/: 3,143. При сборке прибора изменяют значение S до тех пор, пока погрешность компенсации не будет минимальна.
На этом принципе разработаны схемы нивелиров 3Н-3КЛ (рис. 37) и 4Н-2КЛ (рис. 38).
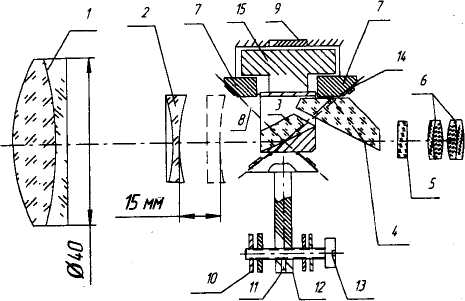
Рис. 37. Принципиальная оптико-механическая схема нивелира 3Н-3КЛ:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор АР-60";4 - призма БкУ-60°; 5 - сетка нитей; 6 - окуляр; 7 — подвижные опоры;8 - бериллиевые нити; 9,15 – магнитоиндукционные демпфер (поз. 15 одновременно выполняет роль балансира); 10 - грузики; 11 - стопорный винт; 12 - маятник; 13 - винт; 14 - прокладка
В нивелире 4Н-2КЛ (см. рис. 38) световой поток через клин 1 (служит для исправления главного условия нивелира) попадает на объектив 2 и через него на плоское зеркало 3 (компенсатор), изображение предмета получают в плоскости сетки нитей, выгравированной на плоской поверхности призмы 4, призма 4 приклеена к плоской поверхности линзы объектива 2. Изображение предмета рассматривается через микроскоп с увеличением 30х, состоящий из пентапризмы 5, микрообъектива 6, полевой диафрагмы 7 и окуляра 8. Фокусировку по предмету осуществляют перемещением оправы 12 вместе с компенсатором 3. Зеркало-компенсатор подвешено на нитях, при этом коэффициент механической компенсации выбирают в соответствии со схемой, приведенной на рис. 32, в. При совмещении главной плоскости объектива 2 с плоскостью сетки нитей может быть применена схема, приведенная на рис. 32, а. Для устранения систематической погрешности компенсации предусмотрена возможность регулировки зазора L (см. рис. 38).
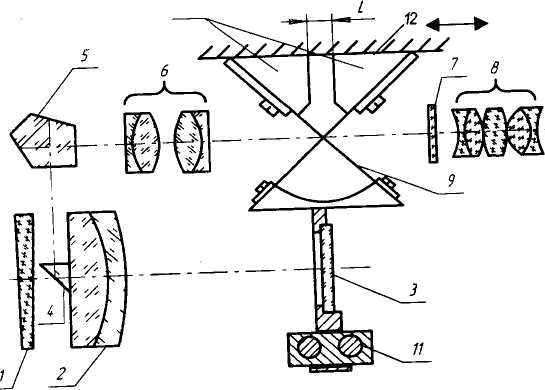
Рис. 38. Принципиальная оптико-механическая схема нивелира 4Н-2КЛ:
1 - клин; 2 - объектив; 3 - плоское зеркало-компенсатор; 4 - призма АР-90° с сеткой нитей; 5 - пентапризма; 6 - микрообъектив; 7 - полевая диафрагма; 8 - окуляр; 9 - четыре бериллиевые нити; 10 - опоры; 11 - демпфер; 12 - подвижная оправа
На рис. 39 показан функциональный блок призменного маятникового типа компенсатора нивелира Н-ЗКЛ, на рис. 40 – ход лучей в его призмах.
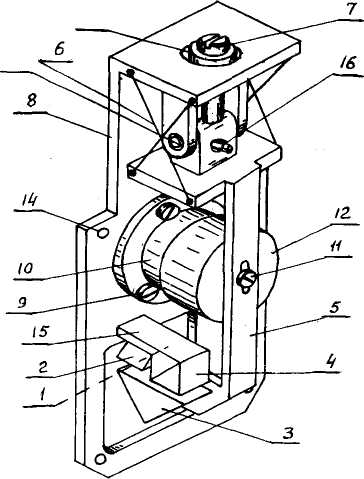
Рис. 39. Функциональная схема блока компенсатора нивелира Н-ЗКЛ:
1 - призма АР-900 (расположена за призмой 2; показана на рис. 69); 2 – призма БР-180";3 - призма компенсатора БР-180°; 4 - призма АР-90°; 5 - маятник;6 - четыре бериллиевые нити; 7 - балансир для регулировки чувствительности компенсатора; 8 - корпус блока компенсатора; 9 - три регулировочных винта стакана 10 демпфера; 11 - регулировочный винт чашки,12 демпфера; 13 – ось ограничивающая маятник от разворотов в горизонтальной плоскости и обрыванитей; 14 - четыре отверстия крепления блока компенсатора к корпусу трубы;15 - кронштейн для крепления призмы 4; 16 - винт устранения систематической погрешности работы компенсатора; 17 - гайка балансира
Расчет компенсатора выполняют согласно уравнению (48).
Перемещение подвижной детали компенсатора, как в нивелире 4Н-2КЛ, автоматически исключает возможное при фокусировании колебание визирной оси.
В процессе измерений на нивелиры оказывают влияние вибрации почвы, ветер, перемещения наблюдателя и другие динамические нагрузки. Указанные факторы вызывают колебания чувствительного элемента компенсатора и затрудняют процесс измерений.
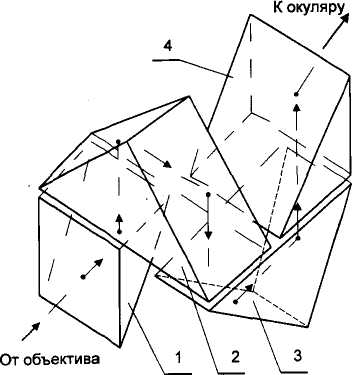
Рис. 40. Ход лучей в призменной системе компенсатора нивелира Н-ЗКЛ:
1,4- призмы АР-90"; 2 - призма БР-1800; 3 - призма БР-1800 (компенсатор)
ГОСТ 10528-76 регламентирует время затухания tK - продолжительность свободных колебаний или до полного успокоения чувствительного элемента, или до таких его амплитуд, которые не влияют на точность отсчитывания (не воспринимаются глазом наблюдателя).
Для геодезических приборов в основном используют три типа демпферов, гасящих колебания: воздушные (крыльчатые и поршневые (например, в нивелире Н-ЗКЛ)), жидкостные и магнитоиндукционные (например, в нивелире 4Н-2КЛ).
Ось 1 нивелира (рис. 41) с двух сторон опирается на закаленные полированные шайбы 2 и 4, плавность поворота ее во втулке 3 регулируют зажатием гайки 5. Для уменьшения силы трения во втулке 3 делают выборку 6. Доступ к осевой системе нивелира осуществляют после отделения подставки, вывинчивания стопорного винта гайки 5 и самой гайки, а также четырех винтов основания.
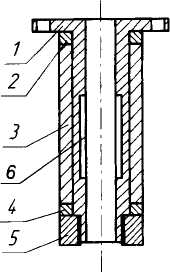
Рис.41. Осевая система нивелира Н-3КЛ
Для регулировки выполнения главного условия и углового смещения сетки нитей необходимо снять защитный колпачок, легко обхватив его и вращая против хода часовой стрелки.
Невыполнение главного условия в нивелире Н-ЗКЛ исправляют смещением сетки нитей в вертикальной плоскости двумя винтами, расположенными над и под оправой окуляра (в нивелире Н-ЗК с одной стороны оправа сетки нитей подпружинена). При этом для смещения сетки нитей, например, вниз необходимо ослабить нижний винт примерно на четверть оборота, затем довернуть верхний винт примерно на столько же, одновременно наблюдая за смещением изображения рейки с горизонтальной нити до правильного отсчета, вычисленного при выполнении поверки главного условия нивелира. По окончании юстировки оба винта должны быть затянуты и повторно выполнена поверка.
Смещение сетки нитей от отвесной линии исправляют разворотом оправы окуляра после ослабления четырех винтов крепления в пределах предусмотренных для этого пазов, например, по отвесу – по вертикальной нити, или по удаленной точке предмета – по смещению ее с горизонтальной нити (смещение должно быть не более чем три толщины нити).
Для юстировки чувствительности компенсатора снимают крышку, затем, придерживая отверткой балансир 7, вращают гайку 17 (см. рис. 39).
Для ремонта компенсатора необходимо снять заштифтованную крышку вместе с окуляром, вывинтив для этого соответствующие винты крепления крышки.
Исправление систематической погрешности работы компенсатора осуществляют ввинчиванием или вывинчиванием отверткой винта 16 (см. рис. 39), тем самым, изменяя расстояние S (см. рис. 31).
Корпус блока компенсатора 8 закреплен четырьмя винтами (два из них работают и как штифты – необходимо запомнить их расположение), вывинтив которые, можно снять блок компенсатора.
Призмы блока компенсатора 1, 2, 4 жестко связаны с корпусом 8 (призмы 1 и 4 приклеены, призма 2 закреплена через прокладку двумя винтами), смещая призму 2, изменяют соотношение между f’ и l.
Регулировку зазора между стаканом и чашкой демпфера осуществляют, ослабив регулировочный винт 11.
Неисправность наводящего винта, как правило, возникает после ослабления закрепительного винта в рукоятке, что, как следствие, приводит к выталкиванию винта и смещению подпружиненной полугайки.
Ремонт наводящего винта и горизонтального круга осуществляют, вывинтив четыре винта крепления основания нивелира.
В нивелире Н-3КЛ определенную сложность вызывает замена и регулировка положения круглого уровня, закрепленного через толстую прокладку тремя винтами. Регулировка может быть выполнена одновременно с исследованием диапазона работы компенсатора в двух взаимно перпендикулярных плоскостях. При этом середина диапазона работы компенсатора должна соответствовать нулевому положению пузырька круглого уровня. Пузырек круглого уровня приводится в нулевое (верхнее) положение тремя исправительными (закрепительными) винтами.
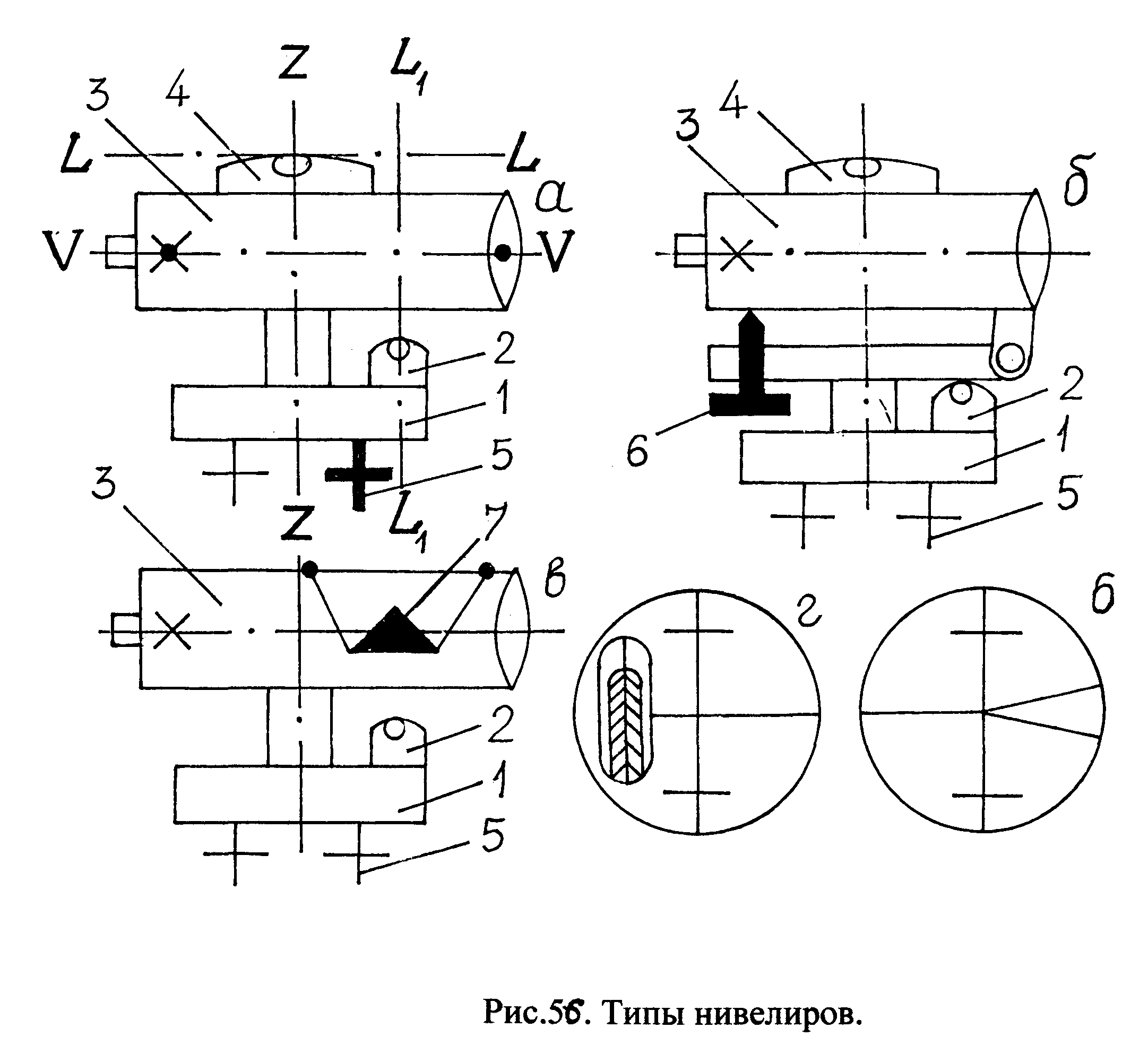
Рис. 42. Типы нивелиров:
а – 1 подставка, 2 круглый уровень, 3 зрительная труба, 4 цилиндрический уровень. 5 подъемный винт; б – 1 подставка, 2 круглый уровень, 3 зрительная труба, 4 цилиндрический уровень, 5 подъемный винт. 6 элевационный винт; в – 1подставка, 2 круглый уровень, 3 зрительная труба, 5 подъемный винт, 7 компенсатор