

5 Описание аппаратуры
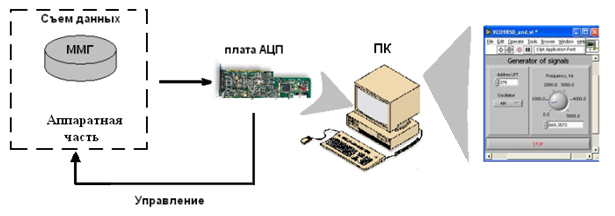
Экспериментальная установка представляет собой систему (рис.7), состоящую из аппаратной и программной части.
Аппаратная часть экспериментальной установки состоит из следующих частей:
– компьютер;
– плата АЦП фирмы National Instruments, которая представляет собой преобразователь интерфейса USB в I2C и SPI;
– ММГ;
Программная часть, реализованная в программном пакете LabVIEW, позволяет получать, визуализировать и обрабатывать данные.
|
Рис. 7 – Общая схема установки |
6 Экспериментальные данные
Основной целью настоящей работы являлось использование вариации Аллана при обработке результатов измерений выходных сигналов ММГ RR-типа фирмы Tronic's при работе на неподвижном основании. Испытания проходили при комнатной температуре. Получение достаточно достоверной оценки характеристик массива данных обеспечивалось регистрацией выходного сигнала ММГ с частотой fs = 40 Гц в течение 2 ч.
Таблица с экспериментально полученными характеристиками 38 гироскопов приведена в Прил. 1.
На рис. 8 представлен график изменения выходного сигнала вариации Аллана для гироскопа Lot40H14 с наименьшим значением нестабильности смещения нуля.
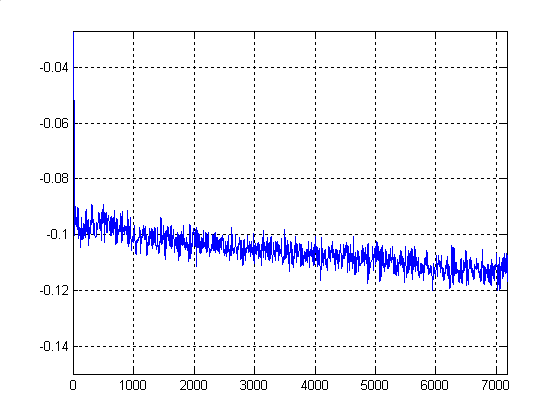
Рис. 8. Выходной сигнал гироскопа Lot40H14, °/c
На рис. 9 представлены графики изменения выходного сигнала и температуры гироскопа Lot41K22 с наименьшим значением случайного блуждания угла.
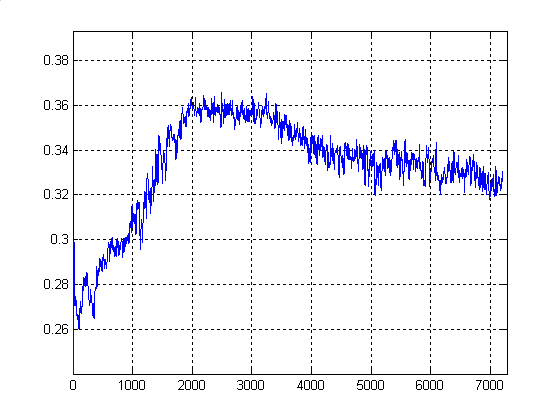
Рис. 9. Выходной сигнал гироскопа Lot41K22, °/c
7 Расчетные соотношения и используемое математическое обеспечение
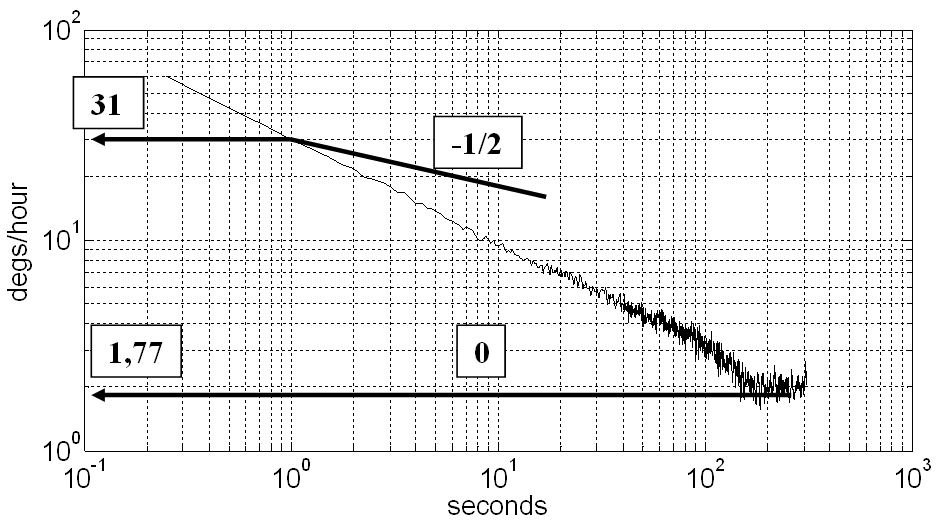
Результаты расчета представлены на рис. 10, 11.
Р
0
1.77
-1/2
0
1,77
31
Р
-1/2
0
6.62
27.7
-1/2
0
6,62
27,7
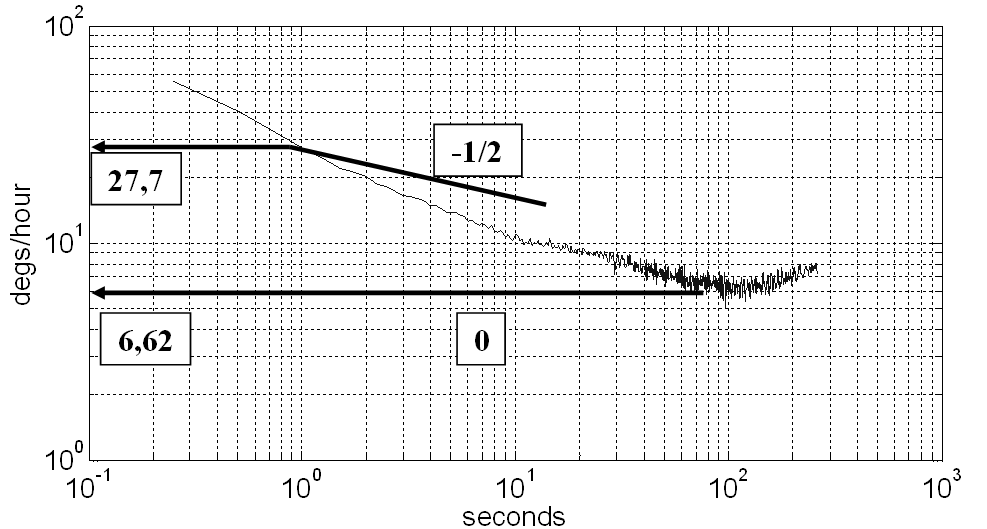
Анализ зависимости
![]() от времени осреднения τ показал следующее:
от времени осреднения τ показал следующее:
для полученных массивов измерений статистически достоверными являются результаты обработки в интервале
0.25 с < τ < 300 с;
для наблюдений выходного сигнала ММГ на неподвижном основании средний наклон графика составляет -1/2, что соответствует преобладанию в указанном интервале τ шумовой составляющей вида «случайное блуждание угла» при значении коэффициента
N =
![]() для Lot40H14 и
для Lot40H14 и
N =
![]() для Lot41K22;
для Lot41K22;
график в интервале τ > 100 с имеет выраженный участок с наклоном 0, характеризующий наличие шумовой составляющей вида «нестабильности смещения нуля» с коэффициентом B = 1.77°/ч для Lot40H14 и B = 6.62°/ч для Lot41K22;
Вычисление проводилось по разработанному алгоритму (Прил. 2), написанному с помощью пакета Matlab.