

4 Методика испытаний. Вариация аллана
Оценка чувствительности микромеханического гироскопа (ММГ) к внешней угловой скорости существенно зависит от решения проблемы выделения информационного сигнала на фоне имеющих место в канале измерения шумовых составляющих. Их структура и характер существенно влияют на достоверность этой оценки.
Классические методы исследования случайных процессов (выборочная дисперсия, спектральная плотность, автокорреляционная функция) не всегда позволяют получить идентификацию источников погрешностей и их количественный вклад в общую статистику шума, особенно в области низких частот.
В последние годы для решения подобных задач применяется метод вариации Аллана, разработанный Давидом Алланом из Американского института стандартов в середине 1960-х г.г. Изначально метод применялся для анализа фазовой и частотной нестабильности прецизионных генераторов.
Позже он был адаптирован для изучения характеристик случайного дрейфа целого ряда датчиков, в том числе, угловой скорости.
Сущность метода вариации Аллана состоит
в вычислении дисперсии не самих отклонений
центрированного случайного процесса,
как это делается при определении
классической выборочной дисперсии, а
разницы соседних отклонений. Метод
оперирует понятием группы последовательных
дискретных значений случайной величины
U(t),
формируемой из массива N
измерений. При этом количество используемых
при вычислении групп K=N/M,
где M – размер группы.
Вычисление вариации Аллана
![]() состоит в определении дисперсии разницы
средних значений
состоит в определении дисперсии разницы
средних значений
![]() двух соседних групп, отстоящих по времени
на величину времени осреднения τ=M/fs,
где fs
– частота опроса измеряемой величины,
т.е.
двух соседних групп, отстоящих по времени
на величину времени осреднения τ=M/fs,
где fs
– частота опроса измеряемой величины,
т.е.
![]()
(11)
Физически параметр τ представляет собой интервал осреднения измеренных значений в группе размером M.
Вместе с тем существует однозначная связь вариации Аллана с классическими характеристиками случайного процесса в частотной области вида
![]()
(12)
где SU(f) – спектральная плотность выходного сигнала U(t).
Исходя из известных для инерциальных измерителей основных физических причин возникновения шумовых составляющих предлагается аппроксимирующее выражение для в виде
![]()
(13)
где R, K, B, N, Q – коэффициенты случайной скорости дрейфа, определяемой как:
R – коэффициент квазидетерминированного изменения входной скорости вида ω(t)=Rt. Область ошибок датчика, имеющих пропорциональную времени работы ошибку вследствие различных факторов (деградация параметров гироскопа, линейное во времени изменение внешних условий: температура, дрейф основания и др.);
K
 – коэффициент случайного блуждания
скорости и описываемая спектральная
плотность
– коэффициент случайного блуждания
скорости и описываемая спектральная
плотность
(14)
B – коэффициент нестабильности смещения нуля, который связывают с техническими особенностями узлов и компонентов датчика, подверженных фликкер-шуму различной природы: электроника и др. Величина нестабильности (°/ч) получена как минимальное значение σ(τ) на участке кривой Аллана с нулевым наклоном.
Д анная
составляющая проявляется на значительных
временах усреднения τ, поэтому ее влияние
становится важным при измерении углового
положения на длительных интервалах
времени. И описываемая спектральная
плотность вида фликкер-шума (
анная
составляющая проявляется на значительных
временах усреднения τ, поэтому ее влияние
становится важным при измерении углового
положения на длительных интервалах
времени. И описываемая спектральная
плотность вида фликкер-шума (![]() -шума)
-шума)
(15)
N – коэффициент случайного блуждания угла. Численное значение ARW (°/√ч) устанавливается путем построения прямой линии наклоном -1/2 и определения значения СКО в точке τ =1. ARW характеризует скорость нарастания интегрированного сигнала (угла) со временем. И описываемая спектральная плотность (белый шум)
![]() (16)
(16)
Q – коэффициент квантования выходного сигнала определяется цифровой природой измерения гироскопа (характеристики АЦП, измерение смещения фазы на π, 2π и т.д. И описываемая спектральная плотность
![]()
(17)
В некоторых случаях аппроксимация может быть дополнена составляющими, описывающими марковский и синусоидальные шумы.
На практике для анализа зависимости
![]() от времени осреднения τ (размера группы
М) и количественной оценки отдельных
составляющих обычно используется
построенный в логарифмическом масштабе
график изменения квадратного корня
от интервала осреднения τ.
от времени осреднения τ (размера группы
М) и количественной оценки отдельных
составляющих обычно используется
построенный в логарифмическом масштабе
график изменения квадратного корня
от интервала осреднения τ.
В общем случае при использовании вариации
Аллана для анализа шумовых составляющих
по результатам достаточного объема
наблюдений выходного сигнала измерителя
проводится построение графика вычисляемой
в соответствии с функцией
![]() с последующим определением по методу
наименьших квадратов значений
коэффициентов полинома, обеспечивающих
максимальное совпадение экспериментальной
и аппроксимирующей функций.
с последующим определением по методу
наименьших квадратов значений
коэффициентов полинома, обеспечивающих
максимальное совпадение экспериментальной
и аппроксимирующей функций.
Полученные значения коэффициентов R, K, B, N, Q характеризуют интенсивность отдельных шумовых составляющих выходного сигнала измерителя.
Однако для предварительной количественной оценки составляющих может быть использована тенденция доминирования отдельных составляющих на различных интервалах τ, в характерных наклонах графика , представленного в логарифмическом масштабе. Из выражения (3) следует, что различным шумовым составляющим соответствуют характерные наклоны графика (табл.1).
Таблица 1
Q |
N |
B |
K |
R |
-1 |
-1/2 |
0 |
+1/2 |
+1 |
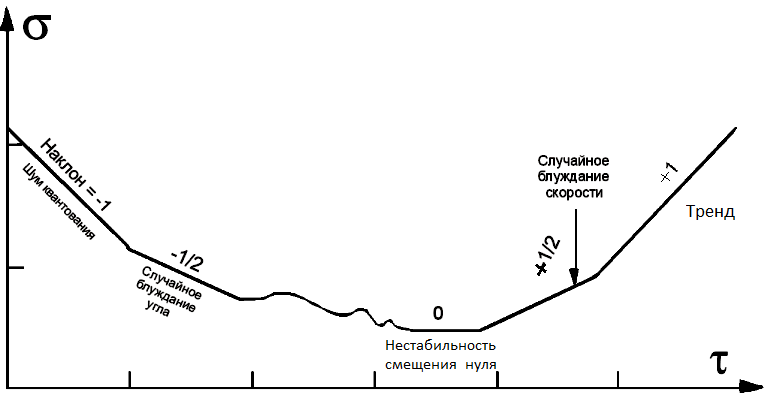
Рис. 6. Различные шумовые составляющие на графике вариации Аллана
При наличии в составе выходного сигнала синусоидальной составляющей вида ω(t)=ω0 sin(2πf0 t+Ө) при постоянном значении ω0, f0 и случайным значением Ө с равномерной плотностью распределения на интервале 0 ÷ 2π, в выражении (3) появляется плотностью распределения вида
![]() (8)
(8)
где
 (9)
(9)
Эта составляющая, как шум от квантования сигнала, характеризуется средним наклоном графика -1 с наложением затухающих с нарастанием τ колебаний.