

3.3 Частотные характеристики ротора ммг
Поясним качественные процессы, происходящие при работе гироскопа, для чего оставим в уравнениях динамики (5) только полезные составляющие моментов внешних сил. Для одноосного ММГ (рис.1) с осью чувствительности Y уравнения динамики преобразуются к виду:
![]() ;
(6)
;
(6)
![]() ,
,
Передаточные функции для системы (6) соответствуют колебательным звеньям:
![]() ,
(7)
,
(7)
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где:
![]() - собственная частота ротора относительно
оси X (частота вторичных
колебаний),
- собственная частота ротора относительно
оси X (частота вторичных
колебаний),
![]() - собственная частота ротора относительно
оси Z (частота первичных
колебаний),
- собственная частота ротора относительно
оси Z (частота первичных
колебаний),
![]() - декремент затухания по оси вторичных
колебаний,
- декремент затухания по оси первичных
колебаний,
- декремент затухания по оси вторичных
колебаний,
- декремент затухания по оси первичных
колебаний,
![]() - добротность вторичных колебаний,
- добротность вторичных колебаний,
![]() - добротность первичных колебаний,
- добротность первичных колебаний,
![]() - передаточная функция колебаний ротора
по оси вторичных колебаний ротора
- передаточная функция колебаний ротора
по оси вторичных колебаний ротора
![]() ,
,
![]() - передаточная функция колебаний ротора
по углу первичных колебаний ротора
- передаточная функция колебаний ротора
по углу первичных колебаний ротора
![]() .
.
Динамические свойства ротора ММГ
характеризуются частотными характеристиками,
амплитудной
![]() (АЧХ) и фазовой
(АЧХ) и фазовой
![]() (ФЧХ). Например, по оси первичных колебаний:
(ФЧХ). Например, по оси первичных колебаний:
![]() ,
(8)
,
(8)
 .
.
Вид частотных характеристик (8) для двух параметров добротности показан на рис. 4. Пик на АЧХ соответствует явлению резонанса в колебательной системе. Отметим ряд важных свойств колебательной системы:
- влияние добротности на высоту пика. Как будет показано в дальнейшем, добротность колебаний играет важную роль в динамике ММГ, определяя ряд его основных параметров.
- в дорезонансной области (слева от пика), АЧХ имеет нулевой наклон (0 дБ/дек), а в зарезонансной области отрицательный двойной наклон (-40 дБ/дек);
- чем выше добротность, тем резче изменяется фазовая характеристика;
- на резонансной частоте сигнал на выходе колебательного звена сдвинут по фазе на 900 независимо от добротности колебаний;
- колебательная система работает как полосовой фильтр, полоса пропускания которого тем меньше, чем выше добротность.
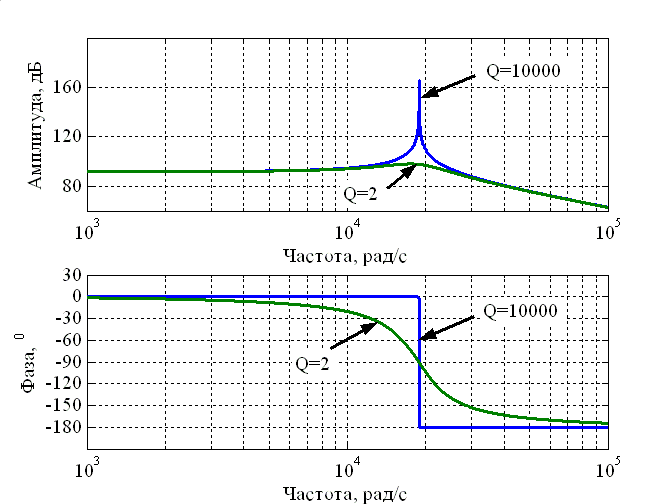
Рис. 4. ЛАЧХ и ЛФЧХ колебательных звеньев при разных значениях добротностей
Аналогичная картина наблюдается и для второго канала, отличающегося лишь частотой, на которой расположен резонансный пик.
3.4 РЕЖИМЫ РАБОТЫ ММГ И ИХ ВЛИЯНИЕ НА ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
Важным свойством колебательных систем является явление резонанса, при котором реакция системы даже на незначительное воздействие велика. Степень реакции определяется параметром добротности. Чем выше добротность, тем выше резонансный пик и, соответственно, реакция системы на внешнее воздействие. Этот эффект широко используется в ММГ различных типов, для улучшения их характеристик. Из уравнений динамики (5) известно, что полезная составляющая момента внешних сил (момент гироскопической реакции) описывается выражением:
![]() .
(9)
.
(9)
То есть момент гироскопической реакции
зависит от угловой скорости первичных
колебаний
![]() .
.
Следовательно, если сами первичные
колебания имеют частоту
![]() ,
то и момент гироскопической реакции
создается на этой частоте (модулируется
этой частотой). Таким образом, на вход
колебательной системы с собственной
частотой
,
то и момент гироскопической реакции
создается на этой частоте (модулируется
этой частотой). Таким образом, на вход
колебательной системы с собственной
частотой
![]() ,
поступает сигнал отличной частоты
.
Сама колебательная система с высокой
добротностью является узкополосным
фильтром, фильтрующим сигнал на всех
частотах, кроме собственной частоты.
Тогда очевидно, что наш полезный сигнал
окажется “подавленным” (рис. 5).
,
поступает сигнал отличной частоты
.
Сама колебательная система с высокой
добротностью является узкополосным
фильтром, фильтрующим сигнал на всех
частотах, кроме собственной частоты.
Тогда очевидно, что наш полезный сигнал
окажется “подавленным” (рис. 5).
Чтобы этого избежать, необходимо сделать так, чтобы частота, которой модулирован момент гироскопической реакции, совпадала с собственной частотой вторичных колебаний, т.е. выполнялось соотношение:
![]() .
(10)
.
(10)
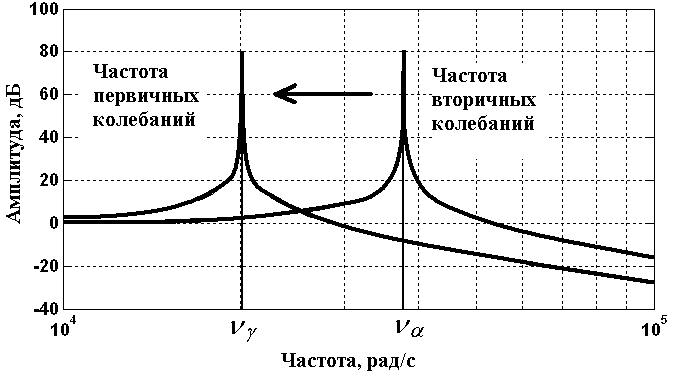
Рис. 5. Режимы работы ММГ
Режим работы ММГ, в котором выполняется соотношение (10) называется режимом “совмещенных частот”.
Когда условие (10) не выполняется, говорят, что гироскоп работает в режиме “разнесенных частот”.
Преимущества ММГ с совмещенными частотами – его высокая чувствительность к угловой скорости приблизительно в раз большая, чем в гироскопе с разнесенными частотами.
Недостаток ММГ с совмещенными частотами – узкая полоса пропускания полезного сигнала (единицы и менее герц), в то время как в ММГ с разнесенными частотами полоса пропускания пропорциональна разности частот и .
Следует заметить, что недостатки режима совмещенных частот можно исключить, используя соответствующие системы управления его движением.
Частота момента гироскопической реакции в общем случае может принимать, по отношению к собственной частоте первичных колебаний произвольно положение.
На практике, в большинстве ММГ для создания и поддержания первичных колебаний заданной амплитуды используется электростатический двигатель. При этом мощность двигателя настолько мала (~10-10 Нм), что для обеспечения нужной величины кинетического момента, также используются резонансные характеристики ротора ММГ и его подвеса.
Как правило, для этого используются специальные электронные системы управления, поддерживающие колебания ротора относительно оси первичных колебаний на их собственной частоте. Добротность же первичных колебаний определяет здесь их амплитуду, а, следовательно, и кинетический момент ротора гироскопа и его масштабный коэффициент.
Рассмотренные выше режимы работы широко используются при создании ММГ. Однако для реализации всех преимуществ режима “совмещенных частот” требуется введение дополнительных электронных систем управления. Сложность создания таких систем заключается в реализации управления амплитудно-модулированными сигналами сугубо нелинейного объекта.