

Биллет №13
Системное проектирование ОЭПиС
1) Эффекты искажения спектра при использовании двумерного ДПФ.
Двумерное ДПФ:
Прямое:

Обратное:

где
 —
исходный двумерный массив отсчетов,
—
исходный двумерный массив отсчетов,
 —
результирующий
двумерный массив отсчетов,
—
результирующий
двумерный массив отсчетов,
 - размерность исходного, а также
результирующего массивов.
- размерность исходного, а также
результирующего массивов.
Массив
 трактуется
как результат дискретизации некоторого
изображения или излучающей поверхности
g(х,у)
(т.е.
как поле облученности или светимости)
:
трактуется
как результат дискретизации некоторого
изображения или излучающей поверхности
g(х,у)
(т.е.
как поле облученности или светимости)
:
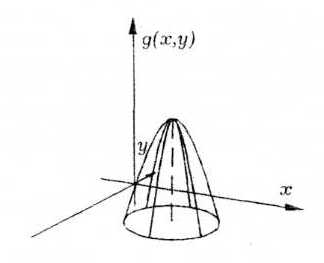
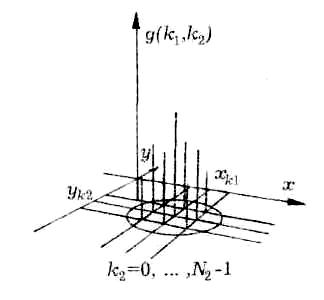
Исследуемый сигнал g(х,у) Результат дискретизации сигнала g(х,у)
Ряд особенностей выполнения двумерного ДПФ (методические погрешности):
1. "Зеркальная" особенность проявляется в том, что отсчеты спектра, соответствующие высоким пространственным частотам находятся в центральной области результирующего массива, а соответствующие низким пространственным частотам — в угловых областях.
Для восстановления правильного вида двумерного спектра необходимо поменять местами отсчеты, расположенные в первом и третьем, а также втором и четвертом квадрантах массива (схема операции для массива отсчётов указана на рисунке):
С хема
восстановления правильного вида
2-мерногп спектра
хема
восстановления правильного вида
2-мерногп спектра
2. Для уменьшения влияния эффекта растекания (Гиббса) при ограничении сигнала используется двумерное "окно", представляющее осесимметричную двумерную функцию, осевое сечение которой определяется функцией Тьюки или Ханна .
3.
Для устранения эффекта "слияния"
исходный двумерный массив
размерности
N1N2
преобразуется
в двумерный массив
 с размерностью N3N4
:
с размерностью N3N4
:

В результате преобразованный массив фактически представляет собой исходный сигнал, окруженный защитными нулевыми отсчетами.
Видеоинформационные измерительные системы
2) Модель регистрирующей камеры. Основные соотношения. Внутренние параметры камеры. Пересчет в произвольную систему координат.
Соотношения между координатами точек сцены и их изображениями и методы оценивания параметров системы регистрации и трехмерной структуры сцены . Различные точки пространства предметов отображаются оптической системой камеры в пространстве изображений на различных расстояниях от фокальной плоскости. Однако, если расстояние между камерой и наблюдаемой сценой значительно превышает фокусное расстояние оптической системы, можно считать, что изображение строится в ее фокальной плоскости. В этом случае можно воспользоваться проективной моделью камеры, в которой изображение трехмерного объекта получается проектированием его в фокальную плоскость (плоскость изображения) через единственную точку, называемую оптическим центром. Прямая линия, перпендикулярная плоскости изображения и проходящая через эту точку, называется оптической осью камеры, а точка пересечения оптической оси с плоскостью изображения - главной точкой.
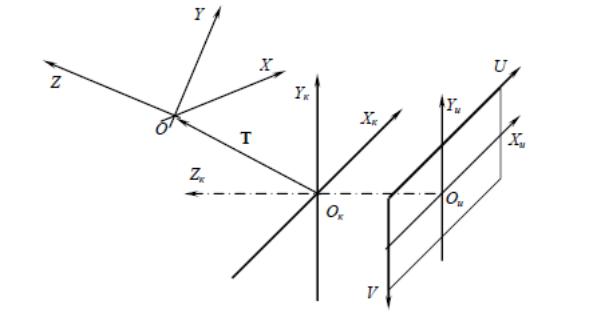
Определим в трехмерном пространстве ортогональную правую
систему координат OKXKYKZK, начало которой совпадает с оптическим
центром, ось OKZK - с оптической осью камеры. Такая система называется стандартной системой координат камеры. Пусть плоскость
изображения находится на расстоянии f' от оптического центра. В этой плоскости зададим систему координат OuXuYu с началом в
главной точке и осями OuXu и OuYu, параллельными осям OKXK и OKYK соответственно (рисунок).
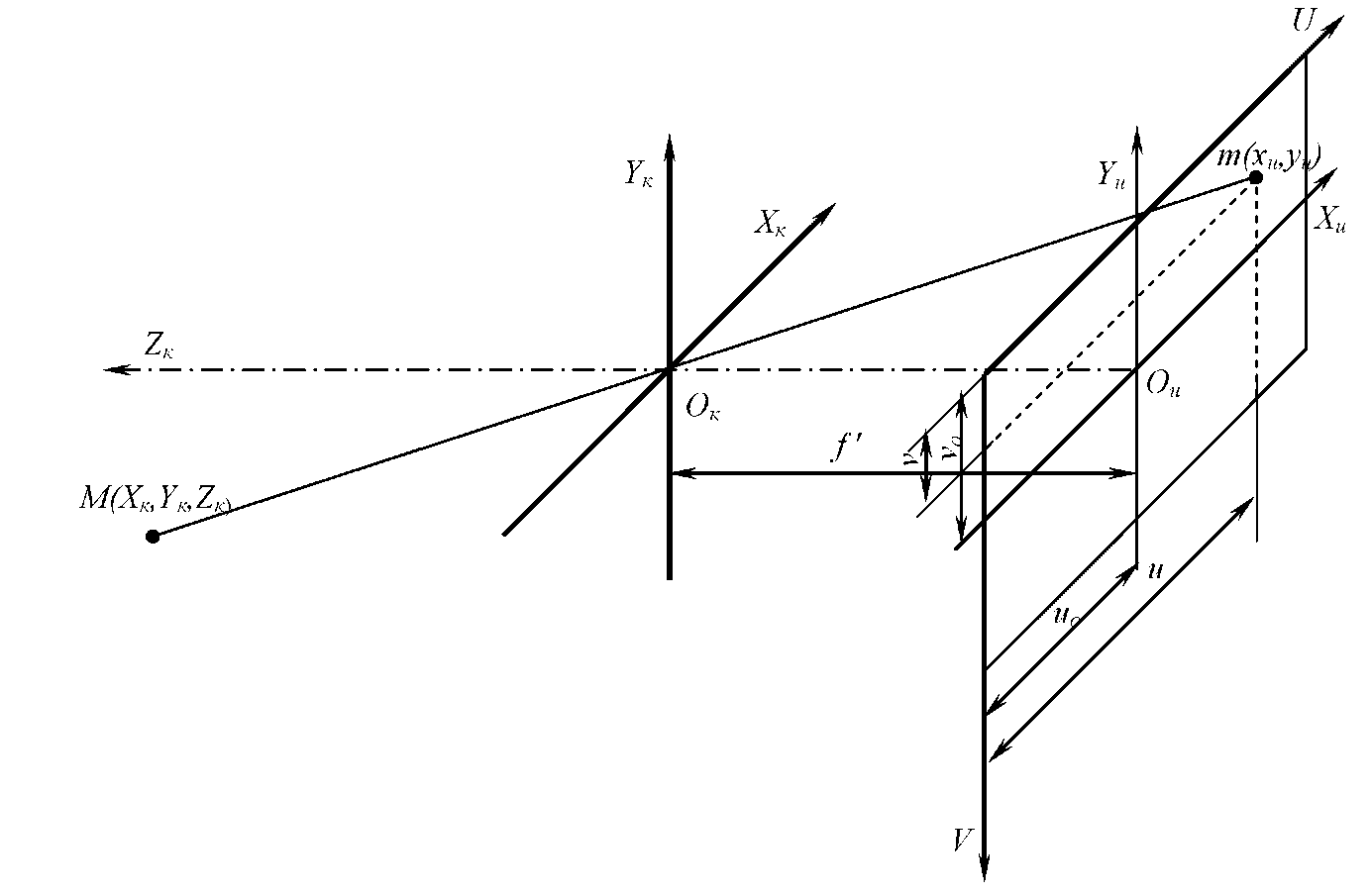
Легко убедиться, что в стандартной системе координат проекцией точки трехмерного пространства Mc координатами (XK,YK,ZK) является точка m в плоскости изображения с координатами m(xu,,yu), причем
Для полного описания камеры следует учесть, что для регистрации изображения в плоскости изображения камеры помещается ФЭП. В общем случае измерение координат в ФЭП осуществляется в единицах, отличных от единиц, задающих координаты в стандартной системе. Поэтому для полного описания камеры необходимо выразить координаты точки m в естественных единицах фотоприемника. В достаточно общем для любых фотоприемников виде (рисунок) это может выглядеть как
где (u0, v0) - координаты главной точки относительно начала координат фотоприемника (в естественных координатах фотоприемника); px и py - масштабы вдоль осей OuXu и OuYu.
В новой системе координаты проекции точки m примут вид
 (1)
(1)
Для последующего изложения введем трехмерный вектор M(Xk ,Y k,Zk )T, соответствующий точке M , и двумерный вектор m (xu , yu )T, соответствующий точке m. Определим также вектор
однородных внутренних координат камеры v u, v,1)T . Используя
эти обозначения, соотношения (1) можно представить в компактной
векторно-матричной записи:

Где
Матрица известная под названием матрицы внутренних параметров камеры, поскольку она содержит только параметры оптической системы и фотоприемника камеры.
В общем случае трехмерные координаты точки могут быть заданы в системе, не совпадающей со стандартной системой
координат камеры ОкХк YKZK. Пусть имеется глобальная (мировая)
система координат OXYZ, а OKXKYKZK.- стандартная система координат
камеры. Переход от системы OXYZ к системе OKXKYKZK. можно осуществить поворотом координатных осей к некоторой промежуточной системе координат и последующим смещением начала координат. Тогда связь между координатами точки M в глобальной и стандартной системе может быть представлена как
M = RM' + T (2)
где M' и M - векторы пространственных координат точки M в глобальной и стандартной системах, соответственно; R - матрица размерности 3 х 3, описывающая поворот стандартной системы координат относительно глобальной; компонентами матрицы являются направляющие косинусы осей глобальной системы в стандартной системе координат; T - трехмерный вектор смещения начала координат глобальной системы относительно начала координат стандартной.
На втором рисунке схематически показано преобразование координат выражение для матрицы поворота R имеет вид:

Где
 - соответствующие эйлеровские поворота
для левой системы координат. Смысл
вектора
- соответствующие эйлеровские поворота
для левой системы координат. Смысл
вектора
 вектор переноса
вектор переноса
Системы прикладного телевидения
3) Тв системы летательных аппаратов. Назначение и классификация
К телевизионным системам летательных аппаратов (ЛА) относятся системы, располагающиеся на самолетах, вертолетах, искусственных спутниках Земли (ИСЗ) и космических аппаратах дальнего космоса. Функции, выполняемые такими системами, чрезвычайно разнообразны. Применение телевидения на атмосферных ЛА обычно преследует цели наблюдения за земной или морской поверхностью, поиск, обнаружение и измерение тех или иных параметров отдельных объектов, либо съемку участков местности.
Распространение получила аппаратура космического телевидения, охватывающая следующие области применения:
космическую видеосвязь (космовидение);
научное исследование объектов космического пространства;
наблюдение за облачным покровом Земли и исследование ее природных ресурсов;
видеоконтроль функционирования систем космических кораблей и управление космическими кораблями.
Космическая видеосвязь предполагает обмен визуальной информацией между обитаемыми космическими кораблями, а также между космическими кораблями и Землей. Для выполнения различных конкретных задач наблюдения и фотометрических измерений широко применяется спектрозональная телевизионная аппаратура, позволяющая получать информацию о малоконтрастных объектах в различных областях спектрального диапазона излучений
Существенное значение приобрели системы видеотелеметрии, с помощью которых осуществляется контроль за работой различных систем космического корабля и управление его полетом. В последнем случае с помощью телевидения автоматически определяются координаты корабля, осуществляется его посадка и маневрирование.
Особое место занимает ретрансляция широковещательных и служебных программ телевидения с помощью спутников-ретрансляторов.
По отдельным техническим признакам телевизионные системы ЛА можно разделить на следующие группы :
с электронными и оптико-механическими развертками;
с накопителями электронно-пленочного и фотопленочного типов;
без накопления энергии, со строчным и кадровым накоплением;
пассивные и активные;
с одновременными и раздельными во времени процессами накопления и считывания информации;
широкополосные и узкополосные системы; замкнутые и открытые (с радиолинией связи).
К электронным телевизионным системам относятся все системы с передающими трубками и твердотельными фотопреобразователями, работающие как с накоплением, так и без накопления энергии. Системы с оптико-механическими развертками строятся либо на принципе сканирования лазерного луча в пространстве объектов (системы «бегущего луча»), либо на принципе механической развертки изображения с помощью зеркальных барабанов, вращающихся призм и т. д. Оптико-механические развертки относятся к разряду «медленных» и используются главным образом в узкополосных системах.
В системах с накоплением энергии применяются как электронно-пленочные накопители, используемые в передающих трубках и твердотельных фотопреобразователях, так и фотопленочные накопители, которые применяются в фототелевизионных системах. Изображение объекта в них вначале регистрируется на фотопленке, а затем, после ее обработки, считывает-ся механическим или электронным путем и преобразуется в видеосигнал.
По времени накопления энергии системы подразделяются на системы без накопления энергии (диссекторные, с лазерным или оптико-механическим сканированием), со строчным и кадровым накоплением. Строчное накопление энергии используется в системах с однострочной разверткой. Вертикальная развертка в этом случае осуществляется за счет поступательного движения ЛА.
Телевизионные системы ЛА, как и любые другие оптико-электронные системы, подразделяются на пассивные и активные, т. е. использующие искусственную подсветку объекта. Очевидно, что подсветку можно использовать лишь на сравнительно малых расстояниях, характерных только для атмосферных ЛА
Обычные телевизионные системы, применяемые в вещательном и прикладном телевидении, работают в режиме, когда процесс экспонирования изображения на фоточувствительную поверхность и процесс коммутации мишени, сопровождающийся образованием видеосигнала, происходят одновременно. Однако в малокадровых, импульсных и фототелевизионных системах эти процессы оказываются разделенными во времени: сначала производится экспонирование накопительного элемента фотопреобразователя (в импульсных системах — кратковременное, в остальных случаях — любое), затем — считывание информации по памяти и, наконец, при необходимости — стирание остаточного потенциального рельефа для подготовки накопителя к новому циклу работы.
Все телевизионные системы ЛА условно разделяются на узкополосные и широкополосные, причем границей между ними установлена максимальная частота видеосигнала 100 кГц. Широкополосные системы используют главным образом для наблюдения за земной поверхностью и ее облачным покровом с самолетов и аппараты, имеющих орбиты до 10 км . Узкополосные телевизионные системы служат для передачи информации из дальнего космоса, причем сокращение полосы частот при ограниченной мощности передатчика позволяет увеличить дальность действия системы в тысячи раз.
Большинство телевизионных систем ЛА являются системами открытого типа, т. е. служат для передачи информации по радиоканалу. Однако на борту самолетов и космических аппаратов могут использоваться и замкнутые системы, выполняющие вспомогательные функции, которые облегчают управление носителем и сбор научной информации.