

5 Оптимизация контуров регулирования
5.1 Оптимизация контура тока якоря
Оптимизацию системы, построенной по принципу подчинённого регулирования, начинаем с внутреннего контура тока якоря. Структурная схема контура представлена на рисунке 5.1
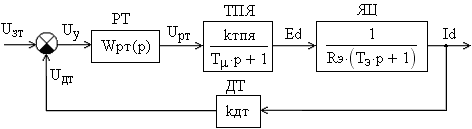
Рисунок 5.1 – Структурная схема контура тока якоря
РТ – регулятор тока;
ТПЯ – тиристорный преобразователь якоря двигателя;
ЯЦ – якорная цепь двигателя;
ДТ – датчик тока;
Оптимизация контура тока якоря на модульный оптимум проводится при следующих допущениях:
– все малые постоянные времени находятся в тиристорном преобразователе:
![]() ;
;
– датчик тока считаю безынерционным;
– двигатель заторможен (Eд = 0).
Определим тип регулятора тока, найдя его передаточную функцию:
 (5.1.1)
(5.1.1)
тогда
 (5.1.2)
(5.1.2)
где
 (5.1.3)
(5.1.3)
Полученной передаточной функции соответствует регулятор тока ПИ-типа. С этим регулятором система астатична по заданию и по возмущению (без учета действия внутренней обратной связи по ЭДС).
П ередаточная
функция замкнутого контура тока имеет
вид:
ередаточная
функция замкнутого контура тока имеет
вид:
 (5.1.4)
(5.1.4)
Т.
к. величина Т
мала, то слагаемым
![]() можно пренебречь, тогда считая
можно пренебречь, тогда считая
![]() ,
получаем
,
получаем
 (5.1.5)
(5.1.5)
где Тт = 2∙Тµ =2∙0,01=0,02 (с) – эквивалентная постоянная времени настроенного на модульный оптимум контура тока.
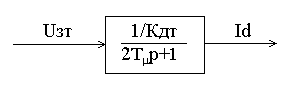
Рисунок 5.2 - Структурная схема замкнутого контура тока
Расчёт параметров регулятора тока:
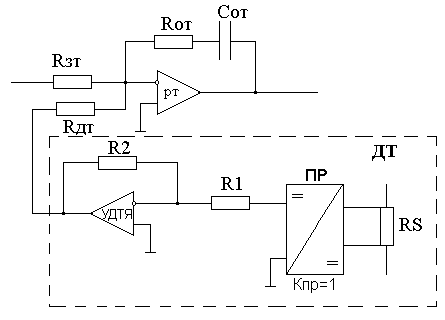
Рисунок 5.3а – Решающая цепь регулятора тока якоря
Коэффициент регулятора тока
 (5.1.6)
(5.1.6)
З адаюсь
величиной ёмкости конденсатора в цепи
обратной связи операционного усилителя
регулятора тока
адаюсь
величиной ёмкости конденсатора в цепи
обратной связи операционного усилителя
регулятора тока
![]()
Сопротивление резистора в цепи обратной связи операционного усилителя регулятора тока:
![]() (5.1.7)
(5.1.7)
Сопротивление в цепи датчика тока:
 (5.1.8)
(5.1.8)
Сопротивление
в цепи задания тока нахожу из условий
установившегося режима, в котором
![]() ,
откуда:
,
откуда:
 .
(5.1.9)
.
(5.1.9)
Считая
![]() получаем:
получаем:
Rзт = Rдт = 118 кОм.
Коэффициент усилителя датчика тока якоря определён в разделе 3.
![]() (5.1.10)
(5.1.10)
Принимаем R1 = 5 кОм, тогда R2 = R1∙kудтя = 5∙47,8 = 239 кОм.
Рассмотрим реальный датчик тока на базе трансформатора тока.
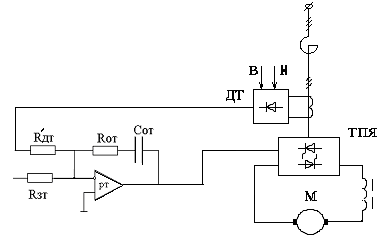
Рисунок 5.3б – Решающая цепь’ регулятора тока якоря
И спользуя
данные по ЭПУ1М о напряжении датчика
тока, и исходя из условия равенства
параметром решающей цепи при сравнении
двух датчиков тока получаем:
спользуя
данные по ЭПУ1М о напряжении датчика
тока, и исходя из условия равенства
параметром решающей цепи при сравнении
двух датчиков тока получаем:
 (5.1.11)
(5.1.11)
 (5.1.12)
(5.1.12)
5.2 Оптимизация контура эдс
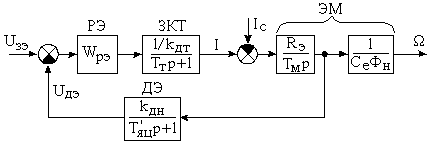
Рисунок 5.4 – Структурная схема контура ЭДС
РЭ – регулятор ЭДС;
ЗКТ – замкнутый контур тока;
ЭМ – электромеханическая часть двигателя;
ДЭ – датчик ЭДС.
Тяц – постоянная времени якорной цепи двигателя, с которой снимается сигнал обратной связи по ЭДС.
В контуре имеются два звена с малыми постоянными времени, которые включены последовательно и поэтому могут быть преобразованы к одному звену с малой постоянной времени, равной их сумме:
 Передаточная
функция разомкнутого контура ЭДС,
настроенного на модульный оптимум:
Передаточная
функция разомкнутого контура ЭДС,
настроенного на модульный оптимум:
 ,
(5.2.2)
,
(5.2.2)
о ткуда
ткуда
 .
(5.2.3)
.
(5.2.3)
Получил пропорциональный регулятор (П-регулятор) ЭДС. С таким регулятором система будет астатичной по заданию (при отсутствии возмущающего воздействия) и статичной по возмущению.
Передаточная функция замкнутого контура ЭДС:
 .
(5.2.4)
.
(5.2.4)
Таким образом, в замкнутой передаточной функции контура ЭДС присутствует форсирующее звено.
Из-за наличия инерционности в датчике ЭДС переходный процесс будет идти с большим перерегулированием. Для уменьшения перерегулирования на вход системы включаю фильтр с постоянной времени, равной инерционности датчика.
Передаточная
функция фильтра
![]() .
.
 (5.2.5)
(5.2.5)
Структурная схема замкнутого контура ЭДС имеет вид:
Рисунок 5.5 – Структурная схема замкнутого контура ЭДС
Р асчет
параметров регулятора ЭДС с применением
датчика напряжения
асчет
параметров регулятора ЭДС с применением
датчика напряжения

Рисунок 5.6 – Регулятор ЭДС
Коэффициент датчика напряжения:
 .
(5.2.6)
.
(5.2.6)
Коэффициент передачи регулятора ЭДС:
 .
(5.2.7)
.
(5.2.7)
Задаюсь ёмкостью в цепи датчика напряжения Сдн = 1 мкФ.
Сопротивление в цепи датчика напряжения:
 (5.2.8)
(5.2.8)
где
![]() .
.
Если
RIдн
= RIIдн
= 0,5∙Rдн,
то
![]() .
.
![]() .
(5.2.9)
.
(5.2.9)
Сопротивление в цепи обратной связи операционного усилителя регулятора напряжения:
Rоэ = kрэRдн = 2,15132103 = 284 кОм. (5.2.10)
Сопротивление в цепи задания ЭДС нахожу из условий установившегося режима:
 ,Iзэ
= Iдн,т.е.
Uзэmax
= Uднmax
= 10 В,следовательноRзэ
= Rдн=132кОм.
,Iзэ
= Iдн,т.е.
Uзэmax
= Uднmax
= 10 В,следовательноRзэ
= Rдн=132кОм.
Ё мкость
фильтра в цепи определю из условия :
мкость
фильтра в цепи определю из условия :
 если
RIзэ
= RIIзэ
= 0,5∙Rзэ,
то
если
RIзэ
= RIIзэ
= 0,5∙Rзэ,
то
![]() .
.
При Rзэ = Rдн Сф = Сдн = 1 мкФ.
Сопротивление резистора токовой компенсации нахожу из условий режима стопорения двигателя: Ед = 0 , Uдэ = 0.
 .
(5.2.11)
.
(5.2.11)
Uдт = Ikдт, Uдн = Uдkдн = I Rakдн,
![]() .
(5.2.12)
.
(5.2.12)
Сопротивления
резисторов делителя
![]() .
Считая kпр
= 1 и принимая R3
= 1 кОм, выражаю R4
.
Считая kпр
= 1 и принимая R3
= 1 кОм, выражаю R4
![]() .
(5.2.13)
.
(5.2.13)
Ограничение выходного сигнала регулятора ЭДС осуществляется двумя встречно включенными стабилитронами VD1 и VD2 . Поскольку выходной сигнал регулятора ЭДС является сигналом задания на ток, то его ограничение приводит к ограничению тока двигателя на уровне максимально допустимого.
Падение напряжения на стабилитронах принимаем ΔUст = 1 В, максимально допустимое напряжение задания на ток Uзтmax = 10 В.
Тогда напряжение на стабилитронах будет равным:
UVD1 = UVD2 = Uзтmax – ΔUст = 10 – 1 = 9 В. (5.2.14)
5 .3
Оптимизация контура тока возбуждения
.3
Оптимизация контура тока возбуждения
Так как привод однозонный, то оптимизацию контура тока возбуждения провожу для точки Фн.
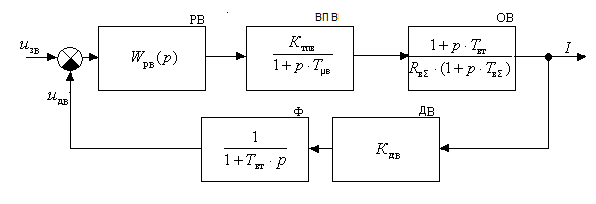
Рисунок 5.7 – Структурная схема контура тока возбуждения
РВ – регулятор тока возбуждения;
ВПВ – вентельный преобразователь цепи возбуждения;
ОВ – обмотка возбуждения;
ДВ – датчик тока возбуждении;
Ф – фильтр в цепи обратной связи предназначенный для осуществления обратной связи по току намагничивания.
Найдём передаточную функцию регулятора тока возбуждения.
При настройке на модульный оптимум передаточная функция разомкнутого контура ЭДС имеет вид:
![]() (5.3.1)
(5.3.1)
Передаточная функция регулятора тока возбуждения:
![]() ,
(5.3.2)
,
(5.3.2)
где kртв – коэффициент регулятора тока;
![]() -
суммарное сопротивление якорной цепи,
Ом.
-
суммарное сопротивление якорной цепи,
Ом.
Получил пропорционально-интегральный регулятор (ПИ-регулятор) контура тока возбуждения.
Р асчёт
параметров регулятора тока возбуждения
асчёт
параметров регулятора тока возбуждения
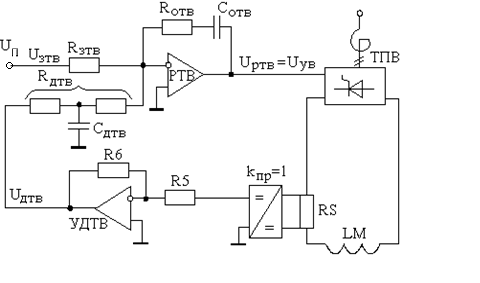
Рисунок 5.8а – Решающая цепь регулятора тока возбуждения
Коэффициент тиристорного преобразователя цепи возбуждения:
 (5.3.3)
(5.3.3)
Определяю коэффициент регулятора тока возбуждения:
![]() ,
(5.3.4)
,
(5.3.4)
где TВ∑ = Tв + Tвт = 0,071 + 0,0071 = 0,0781. (5.3.5)
Задаюсь величиной емкости конденсатора в обратной связи регулятора тока возбуждения:
Cотв = 1 мкФ.
Определяю сопротивление обратной связи регулятора тока возбуждения:
![]() (5.3.6)
(5.3.6)
Определяю сопротивление датчика тока возбуждения:
![]() .
(5.3.7)
.
(5.3.7)
Ёмкость в цепи датчика тока возбуждения:
![]() .
(5.3.8)
.
(5.3.8)
С опротивление
в цепи задатчика тока возбуждения:
опротивление
в цепи задатчика тока возбуждения:
![]() (5.3.9)
(5.3.9)
Пусть
![]()
Тогда
![]() (5.3.10)
(5.3.10)
Расчет
![]() для «П» регулятора тока возбуждения:
для «П» регулятора тока возбуждения:
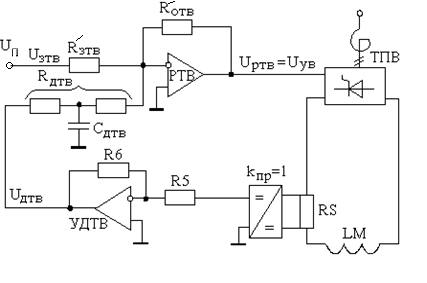
Рисунок 5.8б – Решающая цепь регулятора тока возбуждения
Определим
реальный сигнал
![]() :
:
![]() (5.3.11)
(5.3.11)
где
 .
(5.3.12)
Сопротивление резистора в цепи
задатчика тока возбуждения:
.
(5.3.12)
Сопротивление резистора в цепи
задатчика тока возбуждения:
 (5.3.13)
(5.3.13)
6 РАСЧЕТ СКОРОСТНЫХ ХАРАКТЕРИСТИК И ИХ
СТАТИЗМА В РЗОМКНУТОЙ И ЗАМКНУТОЙ
СИСТЕМАХ ЭЛЕТРОПРИВОДА
РАСЧЕТ СКОРОСТНЫХ ХАРАКТЕРИСТИК И ИХ
СТАТИЗМА В РЗОМКНУТОЙ И ЗАМКНУТОЙ
СИСТЕМАХ ЭЛЕТРОПРИВОДА
Механические характеристики двигателя постоянного тока линейны, поэтому их построение произвожу по двум точкам, соответствующим режимам холостого хода и номинальной нагрузки.
Выражение для расчета механических характеристик имеет вид:
Ω = Ω0 – Δ Ω, (6.1)
![]() ,А
где Ω0
–– угловая скорость идеального холостого
хода.
,А
где Ω0
–– угловая скорость идеального холостого
хода.
![]() .
(6.2)
.
(6.2)
Падение скорости при номинальной нагрузке на естественной характеристике:
![]() .
(6.3)
.
(6.3)
Падение скорости при номинальной нагрузке в разомкнутой системе:
![]() .
(6.4)
.
(6.4)
Падение скорости при номинальной нагрузке в замкнутой системе
![]() .
(6.5)
.
(6.5)
где
![]() .
.
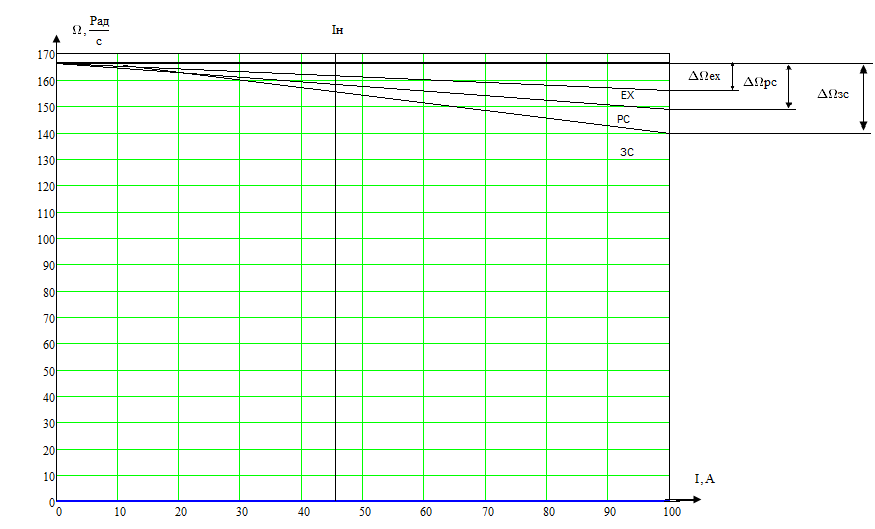
Рисунок 6.1 – Скоростные характеристики электропривода
Статизм естественной характеристики
![]() .
(6.6)
.
(6.6)
Статизм характеристики разомкнутой системы
![]() .
(6.7)
.
(6.7)
Статизм характеристики замкнутой системы
![]() .
(6.8)
.
(6.8)
Напряжение задания на скорость холостого хода о
UЗС1 = оkднCeФн = 166,120,0225210,212,610-3 = 9,9 (В). (6.9)
Напряжение задания на скорость холостого хода = 0,6∙о на искусственной механической характеристике при пониженном напряжении
UЗС2 = 0,6оkднCeФн = 0,6166,120,0225210,212,610-3 = 5,94 (В). (6.10)
Из полученных графиков механических характеристик можно сказать, что естественная характеристика самая жесткая, характеристика разомкнутой системы более мягкая, чем естественная, а характеристика замкнутой системы – самая мягкая.
Большая мягкость механической характеристики – недостаток замкнутой системы, но в то же время система настроена на модульный оптимум и
п ереходные
процессы будут идти с малым (4,3 %)
перерегулированием и достаточно высоким
(8,4Т)
быстродействием.
ереходные
процессы будут идти с малым (4,3 %)
перерегулированием и достаточно высоким
(8,4Т)
быстродействием.
Но
т.к.
![]() ,
то необходимо перейти к системе с ОС по
ЭДС и ДЭ. И при определенном построении
ДЭ, мы получим
,
то необходимо перейти к системе с ОС по
ЭДС и ДЭ. И при определенном построении
ДЭ, мы получим
![]() (6.11)
(6.11)
7 РАСЧЕТ ДИНАМИЧЕСКОГО ПАДЕНИЯ СКОРОСТИ
ДВИГАТЕЛЯ ПРИ НАБРОСЕ НОМИНАЛЬНОГО
МОМЕНТА НАГРУЗКИ
РАСЧЕТ ДИНАМИЧЕСКОГО ПАДЕНИЯ СКОРОСТИ
ДВИГАТЕЛЯ ПРИ НАБРОСЕ НОМИНАЛЬНОГО
МОМЕНТА НАГРУЗКИ
Нахожу передаточную функцию замкнутого контура ЭДС по возмущению:
 .
.
Падение скорости в разомкнутой системе по Лапласу имеет вид:
![]() .
(7.2)
.
(7.2)
Следовательно, падение скорости в замкнутой системе в операторной форме запишется:
 .
(7.3)
.
(7.3)
Переходя от изображения к оригиналу, падение скорости в замкнутой системе запишется:
 .
(7.4)
.
(7.4)
Следовательно выражение для кривой изменения падения скорости при набросе номинального момента нагрузки запишется следующим образом:
 ,
(7.5)
,
(7.5)
где
![]() .
(7.6)
.
(7.6)
 (7.7)
(7.7)


Рисунок 7 – Кривая изменения падения скорости.
Переходный процесс идет с перерегулированием 4,3% и быстродействием 8,4Тm.