

Силовой расчет исходного механизма
Изображаем звено в масштабе μl=0,004м/мм , прикладывая в точку А
известную
реакцию
![]() (которая
равна и противоположна по направлению
(которая
равна и противоположна по направлению
![]() ).
Освобождаем звено от связей со
стойкой и прикладываем вместо нее
реакцию
).
Освобождаем звено от связей со
стойкой и прикладываем вместо нее
реакцию![]() .
На кривошип
действует сила тяжести
.
На кривошип
действует сила тяжести
![]() в точке S1
(рис 3.3).
в точке S1
(рис 3.3).
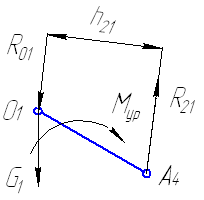
Рис. 3.3 Схема нагружения исходного механизма
Уравновешивающий момент Мур определим из уравнения равновесия кривошипа в форме моментов относительно точки О1.
![]()
![]() ,
,
где:
![]() ,
,
![]() м.
м.
![]() Н*м.
Н*м.
Для нахождения неизвестной реакции построим план сил для данной схемы.
План сил действующих на кривошип и таблица со значениями сил приведены на рис. 3.4.
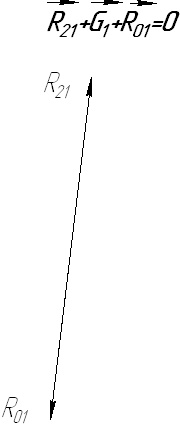
Рис. 3.4. План сил кривошипа
Силовой расчет методом «жесткого рычага» н.Е. Жуковского
Для проверки
правильности построения планов сил и
определения реакций в кинематических
парах механизма необходимо определить
уравновешивающую силу на входном звене
с помощью теоремы Н.Е.Жуковского о
«жестком рычаге» Из полюса Р, в
произвольном масштабе переносим план
скоростей, повернутый на
![]() против часовой стрелки, относительно
его нормального положения. В концы
векторов скоростей точек, в которых
действуют приложенные к механизму силы,
переносим их, сохраняя направление, а
именно:
против часовой стрелки, относительно
его нормального положения. В концы
векторов скоростей точек, в которых
действуют приложенные к механизму силы,
переносим их, сохраняя направление, а
именно:
![]() - сила полезного сопротивления приложенная
к выходному звену;
- сила полезного сопротивления приложенная
к выходному звену;
![]() ,
,![]() -
сила инерции звеньев 2, 3;
-
сила инерции звеньев 2, 3;
![]() ,
,![]() ,-
силы тяжести, действующие на соответствующие
звенья. Уравновешивающая сила
,-
силы тяжести, действующие на соответствующие
звенья. Уравновешивающая сила
![]() действует перпендикулярно кривошипу
моменты сил инерции рассчитываем по
формулам[1,2]:
действует перпендикулярно кривошипу
моменты сил инерции рассчитываем по
формулам[1,2]:
![]() (направления
момента на плане сил и на схеме для
расчета по теореме Жуковского совпадают
так как точки а и b
занимают такое же положение как и точки
А и В на разметке механизма);
(направления
момента на плане сил и на схеме для
расчета по теореме Жуковского совпадают
так как точки а и b
занимают такое же положение как и точки
А и В на разметке механизма);
![]() ,
,
где
![]() -
длинa
звена AB
, м;
-
длинa
звена AB
, м;
![]()
Составляем уравнение равновесия плана скоростей как условного жесткого рычага в форме моментов сил относительно полюса плана скоростей:
![]()
Решая это уравнение
относительно
![]() ,
получаем
,
получаем
Выразим
![]() :
:
![]() ;
;
Определяем :
![]()
Проверим погрешность измерений сделанных двумя способами нахождения уравновешивающего момента (метод планов и метод «жесткого рычага» Н.Е. Жуковского:
Момент
уравновешивающий[1,2]:
![]() .
.
![]() Н*м.
Н*м.
Определим погрешность:

,
Схема «жесткого рычага» Н.Е. Жуковского показана на рис. 3.5.
рис. 3.5 Схема Рычага Жуковского
Расчет других положений производится аналогично приведенному выше расчету.
Для положения №5 имеем:

Заключение
При решении первого раздела был выполнен структурный анализ механизма подачи, а именно: была рассчитана подвижность механизма, было рассмотрена структура механизма.
Во втором разделе «Кинематический анализ» были произведены расчеты по определению перемещений, ускорений, скоростей выходного звена механизма методом планов и методом кинематических диаграмм.
В заключительном третьем разделе рассмотрены построение планов сил действующих на звенья, реакции в кинематических парах; уравновешивающая сила определена методом плана сил и методом рычага Н.Е. Жуковского. Результаты можно считать достоверными т.к. относительная погрешность значения уравновешивающего момента входит в пределы 10% а именно составляет 0,27% ( для механизма в 4-ом положении рабочего хода), 0,3% для 5-го положения
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Артоболевский И. И. Теория механизмов и машин. Учебник для вузов - М.: Наука, 1988, 640 с.
2. Кинетостатика плоских механизмов и динамика машин. Учебное пособие. Составители: Н.Н. Федоров., Издательство ОмГТУ, Омск 2000, 144 с.
3. Проектирование и кинематика плоских механизмов. Учебное пособие. Составители: Н.Н. Федоров., Издательство ОмГТУ, Омск 2000, 144 с.