

4.3 Частотные критерии устойчивости
В уравнении (4.2)
заменим
![]() на
,
получим характеристический вектор:
на
,
получим характеристический вектор:
![]() (4.7)
(4.7)
Если корень
характеристического уравнения расположен
слева от мнимой оси, то вектор
![]() поворачивается на угол
поворачивается на угол
![]() ,
если этот корень находится на комплексной
плоскости справа от мнимой оси, то вектор
поворачивается на угол
,
если этот корень находится на комплексной
плоскости справа от мнимой оси, то вектор
поворачивается на угол
![]() .
.
Определим изменение
аргумента вектора
![]() при изменении частоты
при изменении частоты
![]() :
:
![]() .
.
Пусть
![]() корней характеристического уравнения
расположены справа от мнимой оси, а
остальные
корней характеристического уравнения
расположены справа от мнимой оси, а
остальные
![]() корней – слева.
корней – слева.
Тогда
![]() .
.
В устойчивой
системе
![]() ,
тогда
,
тогда
![]() (4.8)
(4.8)
Рис.4.1. К оценке изменения аргумента характеристического вектора
Из выражения (4.8) следует критерий устойчивости Михайлова:
![]() ,
,
где
![]() и V
и V![]() -
действительная и мнимая части
характеристического вектора.
-
действительная и мнимая части
характеристического вектора.
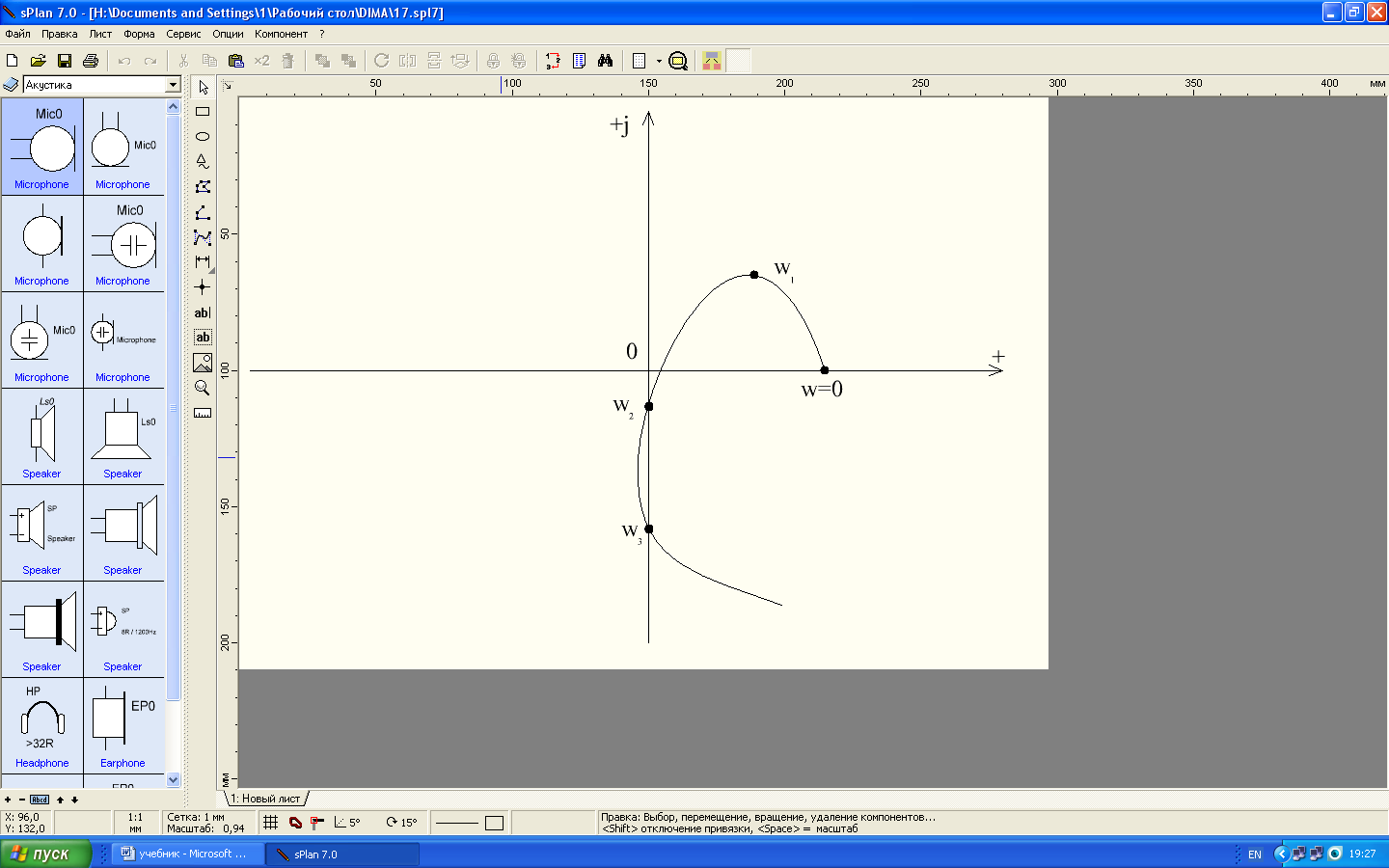
Критерий Михайлова.
Система радиоавтоматики устойчива,
если годограф характеристического
вектора (изображение частотной
характеристики на плоскости частотного
переменного), начинаясь на положительной
части действительной оси, обходит
последовательно в положительном
направлении
![]() квадрантов, где
-
порядок характеристического уровня
системы.
квадрантов, где
-
порядок характеристического уровня
системы.
Если годограф проходит через начало координат, то система находится на границе устойчивости. В этом случае
![]() .
.
Из этих уравнений можно определить значения параметров, при которых система находится на границе устойчивости.
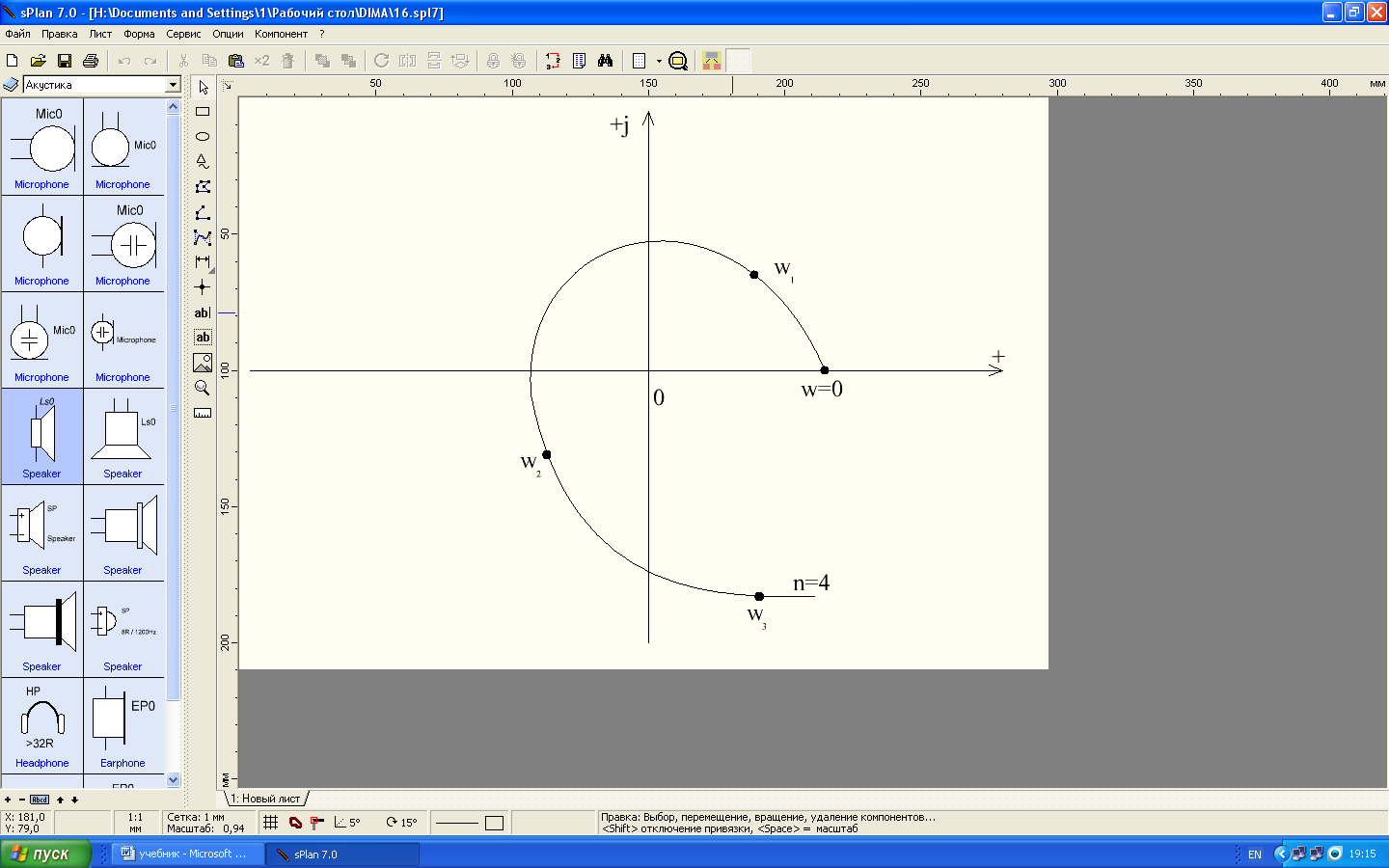
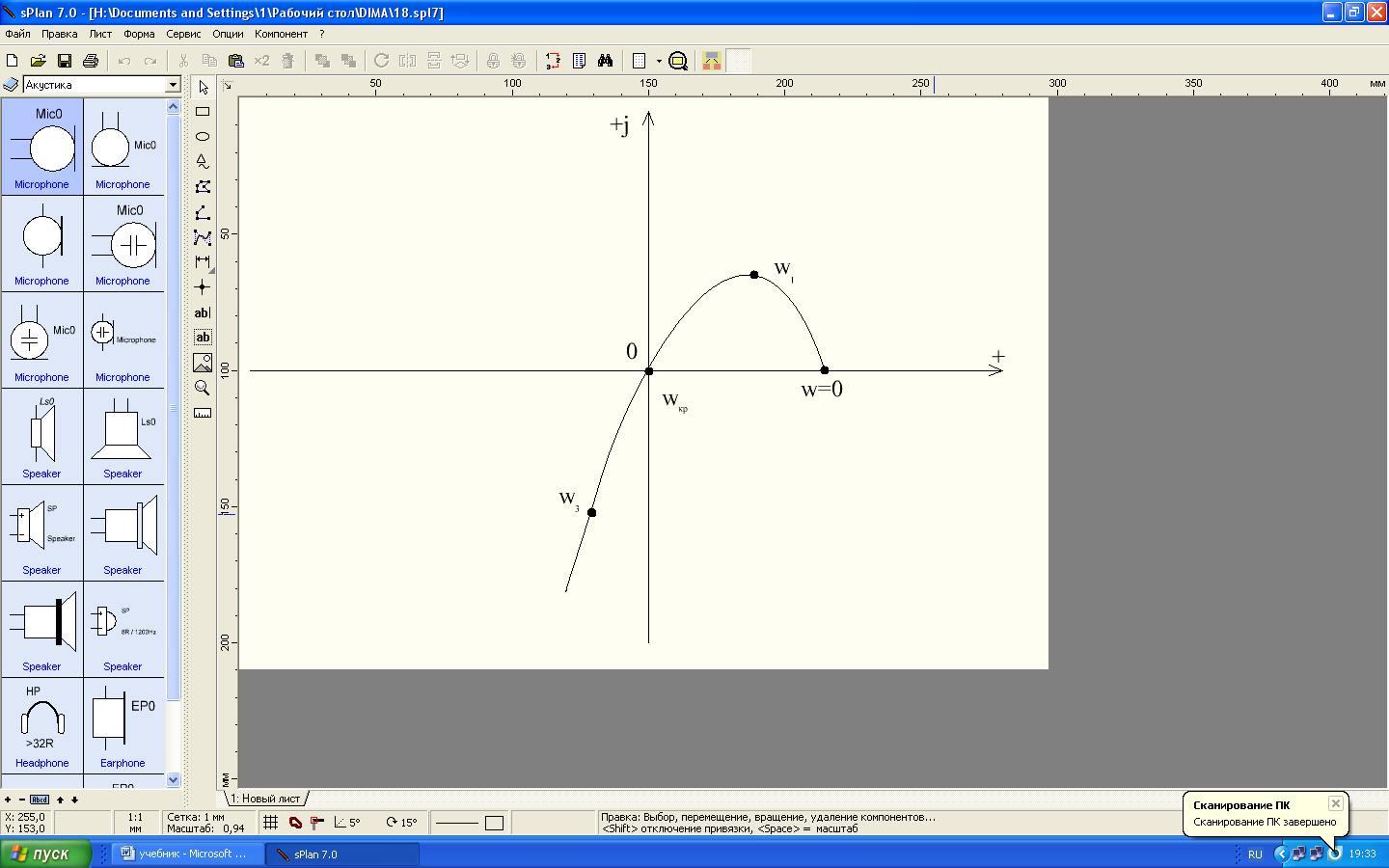
a) б) в)
Рис. 4.2. Общий вид характеристического вектора:
а – устойчивой системы; б- неустойчивой системы; в- системы на границе устойчивости.
Критерий Найквиста.
Система радиоавтоматики, устойчивая в
разомкнутом состоянии, будет устойчива
и в замкнутом состоянии, если годограф
частотной характеристики разомкнутой
системы не охватывает точку с координатами
![]() .
В том случае, когда годограф частотной
характеристики охватывает эту точку,
система неустойчива.
.
В том случае, когда годограф частотной
характеристики охватывает эту точку,
система неустойчива.
Введём вектор
![]() ,
,
где
![]() - частотная
характеристика разомкнутой системы,
- частотная
характеристика разомкнутой системы,
![]() - характеристический
вектор замкнутой системы,
- характеристический
вектор замкнутой системы,
![]() - характеристический
вектор разомкнутой системы.
- характеристический
вектор разомкнутой системы.
Определим изменение
аргумента вектора
![]() для случая, когда замкнутая система
устойчива:
для случая, когда замкнутая система
устойчива:
![]()
Изменение аргумента вектора будет равно нулю, если годограф частотной характеристики разомкнутой системы не охватывает точку с координатами .
4.4 Запасы устойчивости
При проектировании следует обеспечить определённые запасы устойчивости системы, которые характеризуют близость годографа частотной характеристики разомкнутой системы к точке с координатами . Запасы устойчивости определяются на двух частотах: частоте среза, при которой амплитудно-частотная характеристика разомкнутой системы равна единице и критической частоте, при которой фазочастотная характеристика равна .
Различают запас устойчивости по фазе и усилению. Запас устойчивости по фазе показывает, на какое значение фазочастотная характеристика разомкнутой системы на частоте среза отличается от :
![]()
Запас устойчивости по усилению определяет, во сколько раз нужно увеличить коэффициент усиления, чтобы система оказалась на границе устойчивости. Запас устойчивости по усилению вычисляется по формуле:
![]() .
.
Cистемы радиоавтоматики, годографы частотных характеристик которых пересекают вещественную ось только справа от точки с координатами называют абсолютно устойчивыми.
Если годограф
частотной характеристики разомкнутой
системы пересекает вещественную ось и
слева от точки с координатами
,
то систему называют условно устойчивой.
Неустойчивой такая система может быть
как при увеличении, так и при уменьшении
коэффициента усиления. Для нормальной
работы системы радиоавтоматики
необходимо, чтобы запас устойчивости
по усилению был
![]() ,
а запас устойчивости по фазе
,
а запас устойчивости по фазе
![]() .
.