2.3. Частотные характеристики систем радиоавтоматики
Частотная
характеристика получается из передаточной
функции при подстановке в передаточную
функцию комплексной переменной
![]() :
:
![]() .
.
Частотную характеристику можно представить в виде действительной и мнимой части:
![]() .
.
![]() - амплитудно-частотная
характеристика (АЧХ),
- амплитудно-частотная
характеристика (АЧХ),
![]() -
фазочастотная характеристика (ФЧХ) ,
-
фазочастотная характеристика (ФЧХ) ,
![]() -
логарифмическая амплитудно-частотная
характеристика.
-
логарифмическая амплитудно-частотная
характеристика.
Пример 2.3. Построить
логарифмическую амплитудно-частотную
характеристику системы с передаточной
функцией
![]()
Сделаем замену:
![]() .
Тогда:
.
Тогда:
![]()
![]()
![]()
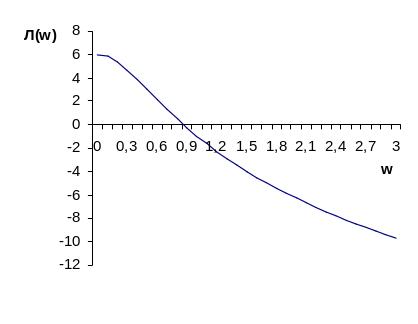
Рис. 2.1. График логарифмической амплитудно-частотной характеристики
2.4.Типовые звенья
Устройства систем радиоавтоматики, классифицируемые по виду передаточных функций, называют типовыми (основными) звеньями.
1) Безынерционное звено.
Примеры : потенциометр, полупроводниковый усилитель.
![]() - передаточная
функция,
- передаточная
функция,
![]() -
коэффициент передачи звена,
-
коэффициент передачи звена,
![]() -
амплитудно-частотная характеристика
звена,
-
амплитудно-частотная характеристика
звена,
![]() - переходная
функция.
- переходная
функция.
2)Инерционное звено.
Примеры: RC- цепочка, изображённая на рис. 2.2.
Рис.2.2. Cхема RC-цепи инерционного звена
![]() - передаточная
функция,
- передаточная
функция,
![]() - частотная
характеристика,
- частотная
характеристика,
![]() - вещественная
частотная характеристика,
- вещественная
частотная характеристика,
![]() - мнимая частотная
характеристика,
- мнимая частотная
характеристика,
![]() - амплитудно-частотная
характеристика,
- амплитудно-частотная
характеристика,
![]() - фазочастотная
характеристика,
- фазочастотная
характеристика,
![]() - переходная функция
звена.
- переходная функция
звена.
3) Интегрирующее звено.
Примеры: усилитель постоянного тока c большим коэффициентом усиления, в цепь обратной связи которого включён конденсатор.
![]() - передаточная
функция,
- передаточная
функция,
![]() - вещественная
частотная характеристика,
- вещественная
частотная характеристика,
![]() - мнимая частотная
характеристика,
- мнимая частотная
характеристика,
![]() - амплитудно-частотная
характеристика,
- амплитудно-частотная
характеристика,
![]() - фазочастотная
характеристика,
- фазочастотная
характеристика,
![]() - переходная функция
звена.
- переходная функция
звена.
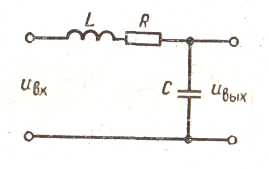
4) Колебательное звено.
Пример: контур, cостоящий из индуктивной катушки, резистора и конденсатора, изображённый на рис. 2.3.
![]() ,
,
где
![]() -
относительный коэффициент затухания.
-
относительный коэффициент затухания.
![]() - амплитудно-частотная
характеристика,
- амплитудно-частотная
характеристика,
![]() - фазочастотная
характеристика,
- фазочастотная
характеристика,
 ,
где
,
где
![]() .
.
Если
![]() ,
то полюсы передаточной функции
–отрицательные действительные числа
и
,
то полюсы передаточной функции
–отрицательные действительные числа
и
![]() .
.
![]() ,
,
![]() , где
, где
![]() и
и
![]() - полюсы.
- полюсы.
![]() ,
,
![]() .
.
3. Структурные схемы и передаточные функции САУ
3.1 Виды соединений звеньев в системах радиоавтоматики
В системах радиоавтоматики встречаются три вида соединений звеньев: последовательное, параллельное и соединение звеньев по схеме с обратной связью.
3.1.1.Последовательное соединение типовых звеньев
C труктурная
схема последовательного соединения
звеньев приведена на рис. 3.1.
труктурная
схема последовательного соединения
звеньев приведена на рис. 3.1.
Рис. 3.1. Последовательное соединение типовых звеньев
По определению передаточной функции
![]() ;
;
![]() ;…;
;…;
![]() .
.
Перемножив передаточные функции, получим:
![]() .
.
Частотная характеристика последовательно соединённых звеньев:
![]() ,
,
где
![]() ,
,
![]() .
.
Логарифмическая АЧХ звеньев, соединённых последовательно:
![]() .
.
3.1.2.Параллельное соединение звеньев
На вход приёмника при таком соединении звеньев подаётся один и тот же сигнал, а выходные сигналы суммируются. Cтруктурная схема такого соединения звеньев приведена на рис. 3.2.

Рис. 3.2. Параллельное соединение типовых звеньев
Так как
то
![]() .
.
Вывод. Передаточная функция параллельно соединённых звеньев равна сумме передаточных функций отдельных звеньев:
![]() ,
,
![]() ,
,
![]() - вещественная
частотная характеристика звеньев,
соединённых параллельно,
- вещественная
частотная характеристика звеньев,
соединённых параллельно,
![]() - мнимая частотная
характеристика.
- мнимая частотная
характеристика.
- амплитудно-частотная характеристика,
- фазочастотная характеристика.
Пример
3.1. Найти передаточную функцию параллельной
системы, состоящей из трёх звеньев и
передаточные функции каждого отдельного
звена, если входное воздействие задаётся
функцией
,
а выходные сигналы с каждого звена
задаются функциями
![]() ,
,![]() ,
,![]() .
Нарисовать структуру системы.
.
Нарисовать структуру системы.
Рис.3.3. Cтруктура параллельной системы состоящей из трёх звеньев
Так как выходные
сигналы в системе суммируются, то
![]() По определению передаточной функции:
По определению передаточной функции: