

4.9 Ускоренные визуальные методы омс
Применяются при плавании в узкостях для быстрого ОМС. Сущность метода состоит в том, что на район плавания заблаговременно строятся сетки изолиний, включая 2 – 3 системы навигационных параметров.
Для визуальных ориентиров такими сетками являются:
- азимутальные;
- стадиометрические;
- гониометрические.
Азимутальные сетки - это сетки изолиний – изоазимуты, применяются для ОМС по измерению пеленгов на 2 ориентира.
Построение сетки: в заданном районе выбираются 2 надежных ориентира и через них проводятся изоазимуты в зависимости от масштаба карты. Измеряются пеленги на 2 ориентира, их значения находят на сетке, пересечение –МС.
Стадиометрическая сетка – сетки изолиний являющихся линиями равных расстояний до 2-х опорных пунктов. На малых расстояниях это будут 2 системы окружностей на которые наносятся измеренные расстояния.
Возможны 2 случая построения:
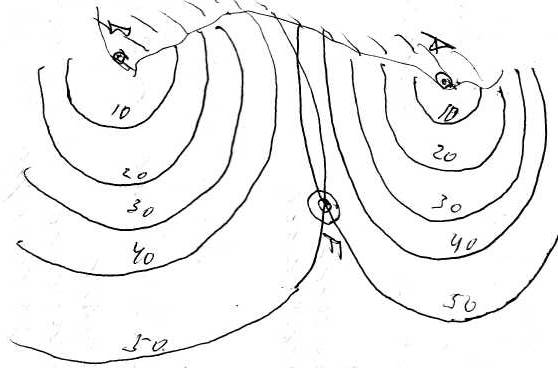 Оба
ориентира в пределах карты. В этом случае
окружности раных расстояний проводятся
вокруг ориентиров с интервалом в 1-10 кб.
Для большей точности необходимо, чтобы
расстояние между ориентирами было 20 –
30 мм.
Порядок: Измеряют 2 расстояния.
Значения находят на сетке и в точке
пересечения находят МС
Оба
ориентира в пределах карты. В этом случае
окружности раных расстояний проводятся
вокруг ориентиров с интервалом в 1-10 кб.
Для большей точности необходимо, чтобы
расстояние между ориентирами было 20 –
30 мм.
Порядок: Измеряют 2 расстояния.
Значения находят на сетке и в точке
пересечения находят МС
Один или 2 ориентира находятся за рамкой карты. В этом случае изостадии наносятся по вычисленным вспомогательным точкам. Существует несколько способов вычисления точек, наиболее удобным является способ по формулам аналитического счисления.

Пусть в т.А положение ориентира за рамкой карты. Задаются произвольным значением дирекционного угла α. Изолиния измеренного расстояния, координаты определяются по формулам аналитического счисления
φР = φА + РШ ;
λР = λА + РД
Гониометрическая сетка – сетка изолиний являющихся линиями проходящими через ориентиры и вмещающая измеренные горизонтальные углы – сетка изогон.
На малых расстояниях изолиния превращается в окружность. поэтому гониометрическая сетка представляет систему окружностей, проходящих через ориентиры.
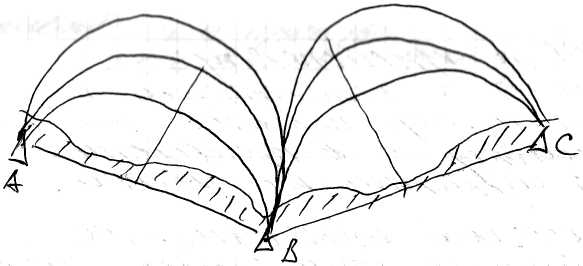 Наиболее
точный метод – графоаналитический.
Ориентиры соединяются линиями, через
середину линии проводится перпендикуляр,
откладывается h
= 0,5ctgα.
Конец вектора определяет центр окружности.
Наиболее
точный метод – графоаналитический.
Ориентиры соединяются линиями, через
середину линии проводится перпендикуляр,
откладывается h
= 0,5ctgα.
Конец вектора определяет центр окружности.
Точность ОМС ускоренными методами оценивается сеткой изолиний. Чем меньше расстояние, тем больше точность, чем больше угол точки пересечения между изолиниями- тем больше угол (?)
5.1.Общие сведения рлс
РЛС является важнейшим навигационным прибором, позволяющий решать 2 основных задачи.-предупреждение столкновения судов и контроль за движением судна.
Плюсы: - автономность возможность самостоятельной работы.- непрерывный круговой обзор и получение наглядного изображения окр обстановки, независящей от условий видимости.
- быстрота, простота, высокая точность ОМС. – многократные ОМС с дискретностью 2-3 мин.
- использование ускоренных методов контроля за положением судна. – обнаружение препятствий и своевременное предупрежд столкновения. – определение элементов движения целей, выбор маневра для расхождения.Минусы: - некоторое искажение изображения на индикаторе РЛС. – теряется представление о пространстве и размерах обьектов. – изображение берега соответствует не урезу воды а некоторой преподнятой части суши. – сложность различения подвижных и неподвижных эхосигналов.
- сравнительно небольшие дальности наблюдения и обнаружения. – длительность обработки наблюдения и выбора маневра. – недостаточная разрешающая способность по пеленгу.