

4.7.3 Омс по створу и расстоянию, по пеленгу и расстоянию, по пеленгу (расстоянию, углу) и глубине. Сущность, порядок, оценка точности.
 ОМС
по створу и расстоянию Способ
применяется при следовании по створу.
Зная направление створа и расстояние
до 1-го ориентира можно определить МС
по 2-м изолиниям.
ОМС
по створу и расстоянию Способ
применяется при следовании по створу.
Зная направление створа и расстояние
до 1-го ориентира можно определить МС
по 2-м изолиниям.
Выбирается надежный ориентир;
Опознавание;
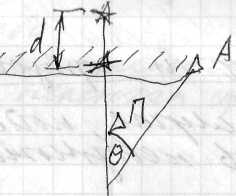
Измерение: в момент нахождения на линии створа измеряется вертикальный угол
определяется расстояние
прокладка на карте
ОМС
О ценка
точности: Р – линейная чувствительность
створа,
ценка
точности: Р – линейная чувствительность
створа,

d – расстояние между створными знаками, arc1/ = 1/3428
ОМС по пеленгу (расстоянию, углу) и глубине. Способ применяется в районах с равноизменяющимися глубинами. Измерив пеленг и глубину получают 2 изолинии, пересечение которых –МС.
Выбирается надежный ориентир и тщательно изучается расположение изобат.
Заблаговременно включается эхолот.
Выполняются измерения: в момент пересечения изобаты измеряется пеленг, засекается угол
Выполняется прокладка
Рассчитывается счислимое МС
Определяется невязка.
МС полученное этим способом является приближенным, оценку точности не производят.
Определение места судна по крюйс – пеленгу. Оценка точности, случаи применения и способ выполнения.
ИП=ГКП+∆МК
Сущность: Один и тот же предмет пеленгуют несколько раз через определенные промежутки времени.
1) Берем ИП1
2) Откладываем на ПУ Sл за час.
3) От конца Sл проводим линию параллельно ИП1
4) Берем ИП2
5) Точка пересечения ИП2 с параллельной линией даст искомую счислимо-обсервованную точку.
Место по крюйс пеленгу называют счислимо – обсервованным.
Частные случаи клюйс-пеленга. Оценка точности, случаи применения и практическое выполнение.
Способ клюйс-пленга имеет ряд частных случаев: 1)Двойной угол. Если при 1м наблюдении заменить угол = @, а второе привести в момент, когда ИП составит с направлением движения судна угол = 2@ то образовавшийся треугольник будет равнобедренным. Поэтому в момент второго наблюдения судно будет находиться на линии второго пеленга и на расстоянии от пеленгуемого предмета, равном величине плавания за промежуток времени между наблюдениями. 2)Траверзное расстояние. 3) Прямой угол при предмете. 4)Разновременные пеленги двух предметов: Если с судна виден предмет, который невозможно запеленговать дважды, то перед его скрытием берут пеленг, замечая время и ОЛ. Рассчитав расстояние, пройденное судном за время между двумя наблюдениями, получают место в момент второго наблюдения. 5)Крюйс-расстояние: - определение места по измерению двух расстояний до одного и того же предмета. Теория и практическое выполнение аналогичны – клюйс-пеленгу
4.8.2 Определение места судна по 2м и 3м расстояниям. Определение места по клюйс-расстоянию. Оценка точности, случаи применения и практическое выполнение.
1.По двум расстояниям. Измеряют секстаном расстояния до двух ориентиров, высота которых известна. Угол 30 – 150. Практическое выполнение подготовить секстаны, опр. Поправку индекса, подобрать ориентиры поближе к берегу и судну, снять углы, ОЛ и время на момент второго измерения, исправить отсчеты секстана поправкой, в точке пересечения окружностей и есть место. Точность М = +/- 1,41 мд: sin Θ
2.По 3м расстояниям: один из наиболее точных и надежных, Образуется треугольник погрешности. Для уменьшения влияния движения судна на точность стараются все делать быстро. Начинают с ориентира ближайшего к траверзу. Делают 5 раз и тогда Д1 = (Д1 + Д5) : 2. Д2 = (Д2 + Д4): 2. Во время 3-го ориентира ОЛ и время. Треугольник – как обычно, углы стараются 30 – 150 градусов.
3.По клюйс-расстоянию (если нет компаса) Практическое выполнение: 1) Измеряют Д1, ОЛ1, Т1. Через > 30 градусов Д2 , ОЛ2 , Т2. Исправить расстояния поправками; от ориентира проложить курс судна и Sл за время измерений; от конца Sл провести окружность радиусом Д1 и в пересечении с Д2 будет место (счислимо – обсервованное)