

4.4.3. Оценка точности омс по 3-м пеленгам.
При ОМС по 3-м пеленгам систематические погрешности легко исключаются, значит при оценке точности принимаются только лишь случайные ошибки. В общем случае вычисление ошибки осуществляется при условии замены всей системы действительных изолиний, двумя эквивалентными линиями (под прямым углом в искомом вероятнейшем месте рассчитываются веса этих ЛП и по весам определяются полуоси эллипса погрешностей a и b). В частном случае ошибки исключаются методом проведения биссектрис и оценку точности производят определением СКП биссектрис. Однако расчеты показывают, что такая же величина получается при вычислении обычным путём без перехода от ошибок ЛП к ошибкам биссектрис.

4.5 Омс по 2м горизонтальным углам
4.5.1 Элементы теории способа. Сущность и порядок омс
Способ ОМС по 2м горизонтальным углам основан на измерении горизонтальных углов между ориентирами. Каждому измеренному значению угла соответствует своя изолиния - изогона. В общем виде уравнение изолинии имеет вид: U = f(φ;λ)
При
малых расстояниях изогона превращается
в окружность вмещающую измеренный угол.
Уравнение такой окружности записывается:
 ;
где d
– расстояние между ориентирами.
Градиент
изогоны направлен по нормали к окружности
в сторону центра. модуль градиента
записывается:
;
где d
– расстояние между ориентирами.
Градиент
изогоны направлен по нормали к окружности
в сторону центра. модуль градиента
записывается:
 где D
– расстояние до ориентира.
где D
– расстояние до ориентира.
Если при измерении горизонтальных углов допущена ошибка, то изолиния изменится на величину Δn:

 Горизонтальные
углы измеряются:
Горизонтальные
углы измеряются:
при помощи секстана;
измерение горизонтальных углов как разность пеленгов измеренных одним и тем же способом, причем для измерения углов можно использовать как ИП так и ГКП.
Сущность: измерив 2 горизонтальных угла между 3 или 4мя ориентирами получают окружности – изогоны. Точка пересечения окружностей-МС.
Порядок ОМС:
Заблаговременно выбираются надежные ориентиры, обеспечивающие наибольшую точность и удобство. Ориентиры должны быть нанесены на карту и хорошо видны.
Ориентиры должны располагаться возможно ближе к плоскости истинного горизонта.
Ориентиры следует выбирать так, чтобы исключить случай неопределенности.
Производится опознавание ориентира.
выполняется измерение углов в следующем порядке: -сначала измеряется 1-й угол – α1, -затем второй угол – β; -затем опять первый угол – α2 ; Т/ОЛ замечается на момент измерения второго угла – β; -знасение 1-го угла определяется как среднее: αср= (α1+ α2)/2
получают МС на карте в точке пересечения изолиний.
4.5.2 Практические способы омс по гу
На карте МС можно получить несколькими способами:
Графический способ – основан на построении окружностей вмещающих измеренные углы, при этом возможны 2 варианта:
1-й вариант включает 2 случая:
1-й
случай: для измерения горизонтальных
углов использовались 4 ориентира
н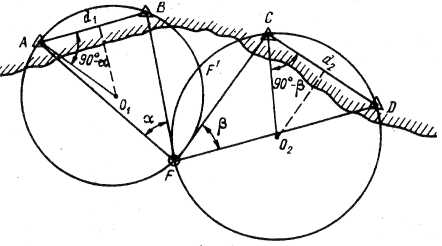 аходят
центры окружностей вмещающих углы α и
β. Для этого при ориентирах строят углы.
при ориентирах А и В:900-α;
при С и D:
900-β.
Если углы α и β < 90, то разности
положительны и углы откладываются в
сторону судна. Если углы α и β > 90, то
углы откладываются в сторону от судна.
аходят
центры окружностей вмещающих углы α и
β. Для этого при ориентирах строят углы.
при ориентирах А и В:900-α;
при С и D:
900-β.
Если углы α и β < 90, то разности
положительны и углы откладываются в
сторону судна. Если углы α и β > 90, то
углы откладываются в сторону от судна.
2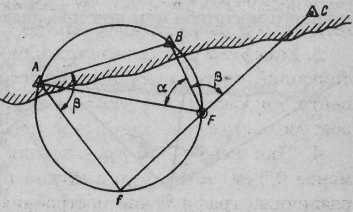 -й
способ: Для измерения горизонтальных
углов используют 3 ориентира. Строится
одна окружность, вмещающая угол α между
А и В При точке А откладываем угол β.
его сторону продолжаем до пересечения
с окружностью т. f.
Через точку f
и 3й ориентир проводится прямая. Точка
пересечения прямой fС
с окружностью определяет обсервованное
МС.
-й
способ: Для измерения горизонтальных
углов используют 3 ориентира. Строится
одна окружность, вмещающая угол α между
А и В При точке А откладываем угол β.
его сторону продолжаем до пересечения
с окружностью т. f.
Через точку f
и 3й ориентир проводится прямая. Точка
пересечения прямой fС
с окружностью определяет обсервованное
МС.
2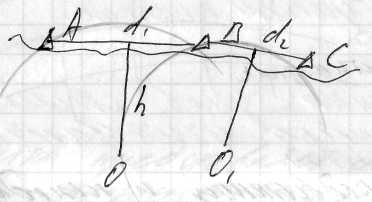 -й
вариант: - ориентиры соединяются линиями
– базы. к середине базы восстанавливается
перпендикуляр. На перпендикуляре
откладывается отрезок h
= 0,5ctgα.
Конец отрезка определяет центр окружности.
Раствором циркуля ОА проводится
окружность.
-й
вариант: - ориентиры соединяются линиями
– базы. к середине базы восстанавливается
перпендикуляр. На перпендикуляре
откладывается отрезок h
= 0,5ctgα.
Конец отрезка определяет центр окружности.
Раствором циркуля ОА проводится
окружность.
С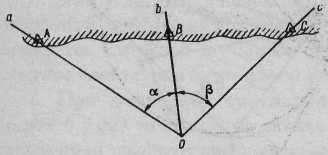 помощью кальки:
помощью кальки:
из произвольной точки О на кальке проводится прямая. При этой прямой строится угол α и угол β. Кальку накладывают на карту и перемещая ее добиваются такого положения, при котором прямые ОА, ОВ и ОС проходили бы через выбранные ориентиры. МС получают уколом циркуля в т. О.
С
помощью протрактора:
Вычисление поправки протрактора:
 ИП
−ОС=Δn;
α − Δn
= ●;
где α – истинное значение.
ИП
−ОС=Δn;
α − Δn
= ●;
где α – истинное значение.
Между гранями подвижных и неподвижной линеек устанавливают углы α − левой, β − правой линейкой. протрактор перемещают по карте до тех пор, пока срезы всех 3-х линеек не пройдут через ориентиры. МС- центр протрактора или обозначается фиксатором. при установке углов на протракторе обязательно учитывается поправка Δn. Если измерялись не смежные углы между 4-мя ориентирами, то необходимо: -наметить 3 – 4 точки - А, В, С, удовлетворяющих постоянному значению угла α (на окружности) провести через них плавную кривую (можно от руки) -перемещая центр протрактора по кривой подобрать на ней точку удовлетворяющую измеренному углу β.
И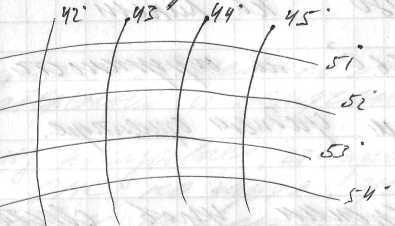 спользование
гониометрических сеток
– это сетки изогон соответствующие
различным значениям углов.
Сетка
представляет собой семейство 2-х
окружностей, которые оцифрованы
значениями 2-х углов. МС получают
пересечением 2-х изогон. Для интерполяции
применяется специальная линейка.
спользование
гониометрических сеток
– это сетки изогон соответствующие
различным значениям углов.
Сетка
представляет собой семейство 2-х
окружностей, которые оцифрованы
значениями 2-х углов. МС получают
пересечением 2-х изогон. Для интерполяции
применяется специальная линейка.
Аналитический метод: координаты искомого места определяют координаты ориентиров А, В, С, между которыми измерены углы, путем прибавления приращения координат Δx и Δy
X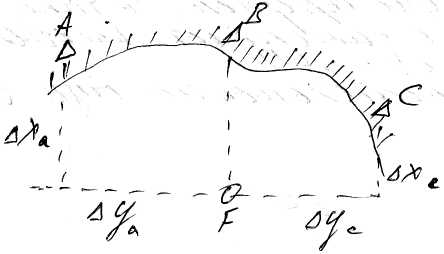 F
=
XA
+ΔX;
YF
=
YA+ΔY
Если углы измерены секстаном, то α
= ОС+(i+s);
α = ГКПВ
– ГКПА;
β = ГКПС
– ГКПВ.
F
=
XA
+ΔX;
YF
=
YA+ΔY
Если углы измерены секстаном, то α
= ОС+(i+s);
α = ГКПВ
– ГКПА;
β = ГКПС
– ГКПВ.
При сомнениях производится проверка на неопределенность: α +β + В = 1800 на линии; α +β + В = 3600 на окружности, В – угол при среднем ориентире.