

4.4.2. Способы определения вероятнейшего места и исключения ошибок измерения.
При действии систематических ошибок:
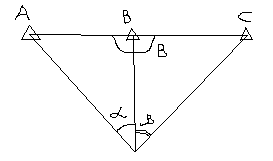
По известным пеленгам ориентиров A, B, C рассчитываются углы между ИП получив два угла определяем место судна по двум углам, это и будет вероятнейшим местом. С карты снимают пеленги из этого места на ориентиры, это и будут ИП. Определяется ΔК по трём пеленгам:

Учитываемую ΔК изменяют на 2-4° - разгон треугольника: прокладывают 6 изолиний (3 с учётом принимаемых поправок, 3 с учётом новой изменённой поправки), получаем два треугольника погрешностей. Через сходственные вершины треугольников проводят прямые линии, точка пересечения линий определяет действительное положение судна. Определяется и ΔК.
Покажем наиболее характерные расположения треугольников погрешностей:
С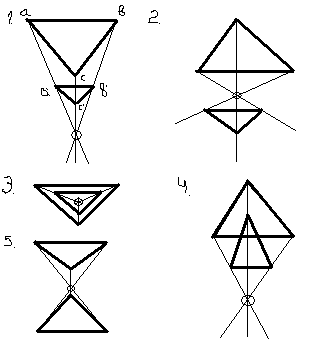 лучай
неопределённости
лучай
неопределённости
Если все ориентиры находятся на одной окружности или прямой, значит нельзя сделать ОМС - ситуация неопределённости. Случай неопределённости имеет место: если α+β+В=360° (все 3 ориентира и место судна на одной прямой), если α+β+В=180° (все 3 ориентира и место судна на одной окружности), где α, β- углы, В- угол при среднем ориентире:
При действии случайных ошибок:
Действие случайных ошибок отличается тем что ошибка каждого пеленга может иметь различное значение. В общем случае случайные ошибки так же вызовут появление треугольника. Исключить их действие невозможно, значит при действии только случайных ошибок определяется только вероятнейшее место.
Рассмотрим практические приёмы:
Если треугольник погрешностей мал, т. е. стороны его на путевой карте не превышают 3-5 мм и если треугольник близок к равностороннему, значит вероятнейшее место в его середине.
При равнобедренном и косоугольном треугольниках вероятнейшее место берётся ближе к меньшей его стороне и к углу близкому к прямому.
Метод смещения изолиний:
Д ля
каждой изолинии рассчитывается смещение
ля
каждой изолинии рассчитывается смещение

На карте прокладываются изолинии и от каждой прокладывается смещение:
Находят
центр площади образованный перекрытиями
всех трёх полос. Её центр- вероятнейшее
место. Если все три полосы не перекрываются,
значит нужно увеличить
 .
.
Совместное влияние:
При совместном действии необходимо выяснить: какая ошибка преобладает. Для этого при получении большого треугольника погрешностей повторяются наблюдения несколько раз (2-3 раза). Если в нескольких близких друг другу определениях размеры и ориентировка треугольников заметно не меняется, значит систематические ошибки преобладают. Если же размеры треугольников меняются, значит основное влияние оказывают случайные ошибки.
Практические методы:
Если углы между пеленгами ≈120° и получается равносторонний треугольник, значит вероятнейшее место в центре треугольника.
Повторяем наблюдения и получаем несколько треугольников близких друг к другу наблюдениях. Для каждого треугольника погрешностей определяем место одним из способов исключения методической ошибки и определяем ΔК (среднее арифметическое). Определяем оценку точности ΔК по методу наименьших квадратов
 Если
ΔКср>mΔ,
значит преобладают систематические
ошибки и ΔКср
принимаем к учёту. Если ΔКср<mΔ,
значит ΔКср
не принимаем.
Если
ΔКср>mΔ,
значит преобладают систематические
ошибки и ΔКср
принимаем к учёту. Если ΔКср<mΔ,
значит ΔКср
не принимаем.