

4.2.1. Опознавание зрительных сно. Принципы выбора ориентиров для омс.
Обнаружив береговую черту визуально или с помощью РЛС, не всегда удаётся сразу опознать её участки и даже специально установленные СНО. Большую помощь штурману могут оказать различные навигационные пособия – описания огней и знаков, лоции и другие, в которых указываются различные характеристики СНО, наиболее приметные естественные ориентиры, снимки отдельных участков берега.
Основными факторами определяющими выбор ориентиров является:
обеспечение большой точности и удобства наблюдений – не рекомендуется выбирать ориентиры с разностью пеленгов <30° и >150°.
выбирать наиболее приметные, нанесённые на карту.
4.2.2. Контроль выбора ориентиров для омс.
Даже полное использование пособий не всегда может исключить ошибки опознавания и всесторонний анализ часто бывает необходим.
Использование площади возможного места судна.
Использование двух ориентиров, пригодных для пеленгования.
Если при ОМС по 2-м пеленгам замечено, что обсервованные точки располагаются не по прямой, совпадающей с проложенным на карте путём судна, а расстояния между обсервованными точками не пропорциональны плавааниям по лагу, то можно предполагать наличие ошибок в опознавании. Подобное явление наблюдается и при ошибке в ΔК, поэтому в окончательно суждении должна быть проявлена осторожность.
Использование двух объектов, до которых можно измерять расстояния.
Практическими признаками наличия ошибки в опознавании одного из ориентиров при ОМС по двум расстояниям могут служить:
расположение полученных обсерваций по кривой линии;
несовпадение направления линии, соединяющей несколько обсерваций с проложенным на карте путём судна;
окружности, проведённые на карте, не пересекаются, т.е. обсервованные точки лежат на мнимой части кривой;
расстояния не пропорциональны плаваниям по лагу, что впрочем замечается хуже, чем при пеленговании.
Когда ошибочно опознаны оба ориентира, то ошибку опознавания обычно легко обнаружить по несоответствию полученных обсерваций с проложенным путём судна. Исключение составляет случай, когда азимут и расстояние между ошибочно опознанными ориетирами равны тем же элементам между действительными ориентирами.
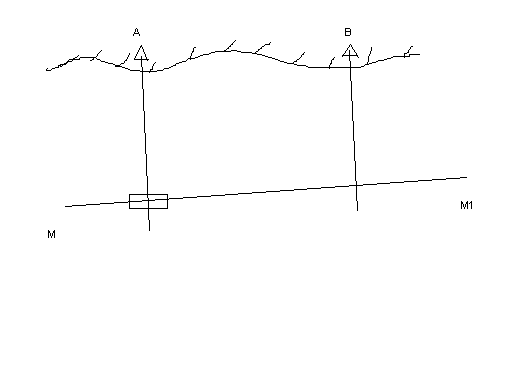
4.3 Омс по одновременным кп 2-х ориентиров
4.3.1. Элементы теории способа, сущность и порядок омс.
способ ОМС по КП 2х ориентиров основан на измерении пеленгов 2х ориентиров. Измеренные пеленги называют навигационными параметрами. Каждому пеленгу соответствует своя изолиния равных пеленгов (изоазимута). На этих изолиниях находится МС.
при визуальном измерении пеленгов расстояния небольшие, поэтому на карте прокладываются непосредственно изолинии:
U=f(φ;λ)
Уравнение пеленгов на плоскости:

Имея 2 изолинии можно получить 2 ур-я с двумя неизвестными. Решая Ур-я можно получить МС.
МС можно получить:
- графическим способом;
- графоаналитическим способом;
- аналитическим способом.
Из-за ошибок в измерении пеленгов возможны смещения изолиний. Величина смещения изолинии находится в прямой зависимости от ф-ии U и характеризуется градиентом;



D – расстояние; mп – СКП пеленга
Определяясь по карте определяют 2 надежных ориентира. В быстрой последовательности измеряют пеленга на ориентиры, замечают Т/ОЛ. вычисляют ИП и прокладывают на карте. Точка пересечения – МС.
Заблаговременно подбирают надежные ориентиры с принципами выбора ориентиров. Основными факторами, влияющими на выбор ориентира, являются обеспечение большой точности и удобство наблюдений. Не рекомендуется выбирать ориентиры разность пеленгов на которые меньше 300 и больше 1500. Выбирают наиболее приметные ориентиры, которые нанесены на карту.
Производится опознавание ориентиров.
Выполняется измерение пеленгов на ориентиры с учетом следующих рекомендаций: пеленги измеряются пеленгаторами; отсчет пеленга берется при совпадении визирной плоскости с направлением на ориентир; плоскость азимутального круга должна быть горизонтальной; для уменьшения влияния движения судна первым измеряется пеленг ориентира расположенного ближе к ДП; при неодинаковой видимости ориентира 1-м берется пеленг на измерение которого уйдет больше времени; Т/ОЛ записываются при взятии 2-го пеленга; при скорости судна >12 узл. берут 3 пеленга в следующей последовательности: 1-го ориентира → 2-го ориентира →1-го ориентира; пеленг 1-го ориентира определяется как среднее значение
Взятые КП исправляют поправкой компаса: ИП = КП+ ΔК;
ИП прокладывают на карте и получают искомое место в точке пересечения.
Доступность, простота;
полное отсутствие контроля при одиночном определении, недостаточная точность.