

4.1.1 Общие понятия Изолинии и линии положения
Возможные ошибки в поправках компаса и лага, недостаточное знание элементов течения, трудности в учете дрейфа — все это приводит к значительным отклонениям судна от заданного пути.
В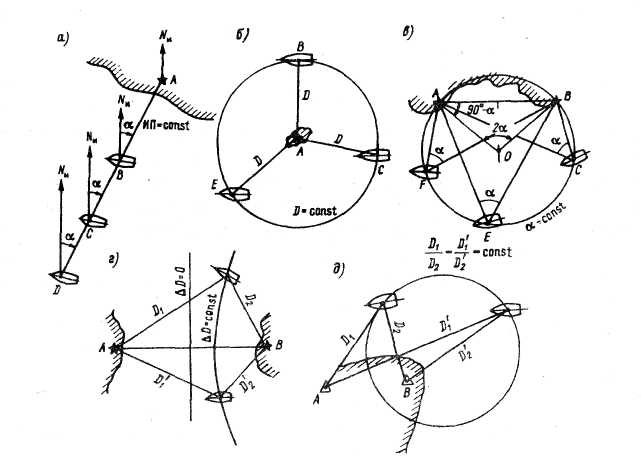 се
визуальные способы определения места
судна в море основаны на измерении
расстояния и направления (или их
комбинаций) до объектов, координаты
которых известны. Применение того или
иного способа определения места судна
оценивается двумя факторами:
обеспечением необходимой точности и
простотой проведения наблюдений и
обработки результатов. Основные методы
обработки наблюдений, нашедшие широкое
распространение, — графический или
графоаналитический, основанные на
понятии об изолинии и линии положения.
се
визуальные способы определения места
судна в море основаны на измерении
расстояния и направления (или их
комбинаций) до объектов, координаты
которых известны. Применение того или
иного способа определения места судна
оценивается двумя факторами:
обеспечением необходимой точности и
простотой проведения наблюдений и
обработки результатов. Основные методы
обработки наблюдений, нашедшие широкое
распространение, — графический или
графоаналитический, основанные на
понятии об изолинии и линии положения.
При визуальных способах определения места судна, используемых на сравнительно небольших расстояниях до ориентиров, будем пренебрегать кривизной земной поверхности, т. е. решать задачу на плоскости.
Измеряемые для определения места судна направления и расстояния или их производные (углы, разность расстояний) до объектов с известными координатами называются навигационными параметрами. Геометрическое место точек, отвечающее постоянному значению навигационного параметра, называется навигационной изолинией. В навигации для определения места судна используются следующие навигационные параметры и соответствующие им изолинии.
Пеленг. На судне измерен истинный пеленг (ИП) предмета А (рис. а), равный а. Проложив на карте линию пеленга AD, можно утверждать, что судно в момент взятия пеленга находилось на этой линии, так как в противном случае значение пеленга было бы отличным от измеренного. Однако неизвестно, в какой точке (В, С, D) на линии пеленга находится судно. Прямая линия AD, отвечающая условию ИП = а, на которой находилось судно в момент наблюдения, будет называться изолинией пеленга или изопеленгой (изоазимутой на сфере).
Расстояние. Измерено расстояние D между судном и ориентиром А (рис. б). В этом случае судно будет находиться на окружности радиусом D с центром в точке А. Эта окружность будет называться изолинией расстояния или изостадией.
Горизонтальный угол. Если измерен горизонтальный угол между предметами А и В (рис. в) равный α, или этот угол вычислен как разность двух пеленгов
α = ИП2 - ИП1, то вершина горизонтального угла будет лежать на окружности, проходящей через точки А и В, а центр окружности О будет находиться на перпендикуляре к линии АВ в точке его пересечения с линией, проведенной под углом 90°- α к линии АВ (рис. в). Эта окружность называется изолинией горизонтального угла α или изогоной.
Разность расстояний. В некоторых радионавигационных системах измеряется разность расстояний до двух ориентиров. Тогда изолинией разности расстояний будет гипербола
(рис. г).
Линией положения называется прямая, заменяющая участок навигационной изолинии вблизи счислимого места судна.
Смещение линии положения в общем виде равно: Δn=ΔU/g
Обобщенная теория линий положения.
Позволила расширить методы получения обсервованных координат, которые можно подразделить на три группы: графические (использование карт с сетками изолиний и непосредственная прокладка изолиний); графоаналитические (обобщенный метод линий положения и использование специальных таблиц определяющих точек для построения линий положения); аналитические (прямые алгебраические методы решения уравнений и численные с использованием метода хорд или касательных).
О пределение
места судна сводится к нахождению точки
пересечения изолиний от двух или
более ориентиров. Если координаты точки
получены без ввода элементов счисления
пути судна, то они называются обсервованными
(φ0,
λ0).
Если при определении места использовались
элементы счисления (курс и скорость),
то такие определения называют
счислимо-обсервованными.
пределение
места судна сводится к нахождению точки
пересечения изолиний от двух или
более ориентиров. Если координаты точки
получены без ввода элементов счисления
пути судна, то они называются обсервованными
(φ0,
λ0).
Если при определении места использовались
элементы счисления (курс и скорость),
то такие определения называют
счислимо-обсервованными.
На сравнительно небольших расстояниях, например при визуальных определениях места судна, изолинии прокладываются непосредственно на карте (выполняется графическое решение). При больших расстояниях, когда необходимо учитывать сфероидичность Земли, непосредственная прокладка изолиний на карте становится затруднительной. В этом случае отрезок изолинии заменяется прямой линией.
Оценка точности определения места судна по двум линиям положения.
При воздействии случайных ошибок измерений смещение каждой линии положения характеризуется линейной величиной Δn, которое характеризуется средней квадратичной ошибкой линии положения mлп, а ошибка определения места, являющаяся результатом случайных ошибок в обеих линиях положения, характеризуется площадью параллелограмма, образованного двумя полосами положения.
Порядок проведения оценки точности обсервации при действии случайных ошибок таков:
задаются средними квадратичными ошибками измерений для конкретных условий плавания mU1 и mU2;
вычисляют возможное смещение каждой линии положения:
![]()
откладывают от полученной обсервации по нормали к линии положения (по направлению градиентов) полученные смещения и строят параллелограмм abcd. Вероятность нахождения судна в площади параллелограмма около 50%; если взять для расчета 2m, то вероятность увеличится до 95%, а если принять предельную ошибку 3m, то вероятность повышается до 99%. Следует указать, что такое рассмотрение является только ориентировочным, так как нет достаточной достоверности в принятом значении случайной ошибки.
Для более строгой оценки точности обсервованного места следует построить эллипс ошибок — кривую равной вероятности
Расчет суммы и разности полуосей эллипса, а затем величины осей эллипса (а — большой, b — малой) выполняется по формулам:
![]()
где Θ — острый угол пересечения двух линий положения.
Большую полуось эллипса проводят под углом φ относительно второй (более точной) линии положения:
![]()
Теоретическая вероятность нахождения места судна внутри эллипса ошибок около 39%.
Для удобства анализа точность обсервованного места целесообразнее оценить не площадью, а одним числом. За среднюю квадратичную ошибку обсервованного места М принимают радиус круга, охватывающий эллипс погрешности. Этот радиус равен
![]()
Вероятность того, что место судна находится внутри радиуса круга, М изменяется от 63,2 до 68,3% и зависит от соотношения полуосей а и 6. Для более строгого оценивания места судна одним числом в качестве стандартной характеристики рекомендуется 95%-й круг погрешностей места с центром в оцениваемой точке, который захватывает действительное место с вероятностью 0,95.
Влияние систематических ошибок. Если при изменении навигационных параметров имела место неисключенная систематическая ошибка σ, то каждая линия положения сместится параллельно самой себе на величину Δn1 для первой линий положения и Δn2 — для второй. Обозначим угол между направлениями градиентов через в и получим формулу для расчета смещения обсервованного места F в точки b и d :

В формулах (8.13) и (8.14) угол Θ может изменяться от 0 до 180°, при 0 > 90° появится знак «+». Поэтому величина линейного смещения места судна под действием систематических ошибок будет меньше при острых углах Θ, чем при тупых.
Таким образом, можно сделать вывод, что действие случайных ошибок приводит к понятию о площади возможного места, а действие систематических ошибок характеризуется линейной величиной, направление которой может быть известно.
4.2. Опознавание зрительных СНО, и выбор ориентиров для ОМС.