4.4. Расчет параметров выпрямителя динамического торможения.
Передаточный коэффициент тиристорного преобразователя:

где
 – максимальное напряжение выпрямителя;
– максимальное напряжение выпрямителя;
– максимальное напряжение управления выпрямителем.
Некомпенсируемая постоянная времени тиристорного преобразователя .
Расчет системы подчиненного регулирования.
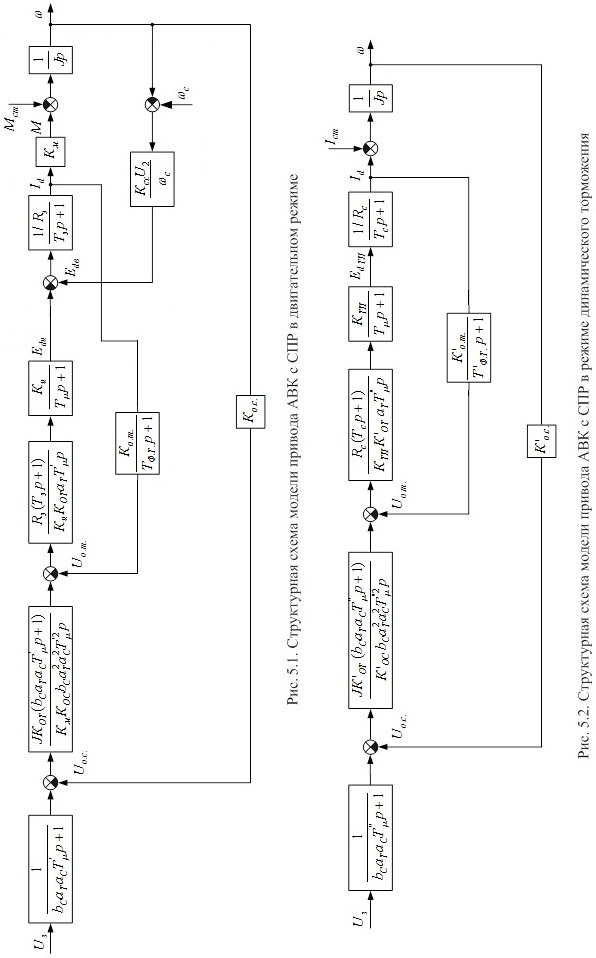
5.1 Определение передаточных функций регуляторов в двигательном режиме.
В общем виде передаточная функция регулятора:
где
 - коэффициент демпфирования контура;
- коэффициент демпфирования контура;
 - сумма некомпенсируемых
постоянных времени;
- сумма некомпенсируемых
постоянных времени;
 - передаточная
функция оптимизируемого контура;
- передаточная
функция оптимизируемого контура;
 - интегратор
(оператор оптимизирования).
- интегратор
(оператор оптимизирования).
Расчет регуляторов ведется с внутреннего контура, т.е. с контура тока. Передаточная функция оптимизируемого контура тока:
где
 - коэффициент обратной связи по току.
- коэффициент обратной связи по току.
Тогда в соответствии с формулой (1) передаточная функция регулятора тока:
где
 - эквивалентная некомпенсируемая
постоянная времени контура тока с учетом
фильтра на входе датчика тока;
- эквивалентная некомпенсируемая
постоянная времени контура тока с учетом
фильтра на входе датчика тока;
 - коэффициент
демпфирования контура тока.
- коэффициент
демпфирования контура тока.
Из формулы видно, что передаточная функция регулятора тока имеет пропорционально - интегральный характер.
Передаточная функция замкнутого контура тока:
Передаточная функция оптимизируемого контура скорости:
где
 -
коэффициент обратной связи по скорости.
-
коэффициент обратной связи по скорости.
Тогда в соответствии с формулой (1) передаточная функция регулятора скорости:
где
 -
коэффициент демпфирования контура
скорости.
-
коэффициент демпфирования контура
скорости.
Из формулы видно, что передаточная функция регулятора скорости имеет пропорциональный характер.
Передаточная функция замкнутого контура скорости:
Для получения астатических переходных характеристик по возмущению сделаем регулятор скорости пропорционально - интегральным. Для этого введем в структурную схему интегральную часть регулятора скорости.
Передаточной функцией оптимизируемого контура для интегрального регулятора скорости будет 1. Тогда передаточная функция интегрального регулятора скорости:
где
 -
коэффициент демпфирования второго
контура скорости.
-
коэффициент демпфирования второго
контура скорости.
Преобразуя два контура скорости в один, получаем передаточную функцию пропорционально - интегрального регулятора скорости:
и фильтр на входе системы с передаточной функцией:

5.2. Определение передаточных функций регуляторов в режиме динамического торможения.
Передаточная функция оптимизируемого контура тока:

Передаточная функция регулятора тока:

Из формулы видно, что передаточная функция регулятора тока имеет пропорционально - интегральный характер.
Передаточная функция замкнутого контура тока:
Передаточная функция оптимизируемого контура скорости
Передаточная функция регулятора скорости:
Из формулы видно, что передаточная функция регулятора скорости имеет пропорциональный характер.
Передаточная функция замкнутого контура скорости:

Аналогично предыдущим расчетам делаем пропорционально - интегральный регулятор скорости.
Передаточная функция интегрального регулятора скорости:
Преобразуя два контура скорости в один, получаем пропорционально - интегральный регулятор скорости:
и фильтр на входе системы с передаточной функцией:

Тогда структурные схемы модели привода в двигательном и тормозном режимах будут выглядеть, как показано на рисунках 5.1 и 5.2.