

Выбор оборудования для динамического торможения.
Выбор тиристорного преобразователя.
Выбор преобразователя производится по номинальному току и напряжению. Ток в обмотке статора двигателя при динамическом торможении, для создания одинаковых по величине магнитных потоков, должен быть больше переменного тока фазы статора:


По каталогу [11] выбираем тиристорный преобразователь ТЕ1400/24Т-М1-3-УХЛ4.
Таблица 2.12
Технические данные выпрямителя ТЕ1400/24Т-М1-3-УХЛ4.
Параметр и единица измерения |
Значение |
||
Напряжение питания, В |
380 |
||
Номинальные выходные параметры |
Ток, А |
400 |
|
Напряжение, В |
24 |
||
Выбор трансформатора выпрямителя.
Трансформатор выбирается по мощности, напряжению и току вторичной обмотки.
Напряжение вторичной обмотки трансформатора:

Ток вторичной обмотки трансформатора:

Мощность трансформатора:

Выбираем трансформатор ТСЗИ-6,3/380/12
Таблица 2.13
Технические данные трансформатора ТСЗИ-6,3/380/12
Параметр и единица измерения |
Значение |
Sном , кВА – мощность трансформатора |
6,3 |
Uвн , В – напряжение на высокой стороне |
380 |
Uнн , В – напряжение на низкой стороне |
12 |
Uкз , % |
3 |
Потери КЗ, Вт |
150 |
I1н, А |
10 |
I2н, А |
303 |
Выбор автоматического выключателя трансформатора.
Номинальный ток трансформатора инвертора:


По каталогу [10] выбираем автоматический выключатель EasyPact фирмы Schneider Electric.
Таблица 2.14
Технические данные автоматического выключателя EasyPact
Параметр и единица измерения |
Значение |
Номинальное рабочее напряжение, В |
400 |
Номинальный ток, А |
15 |
Номинальный ток отключения, кА |
7,5 |
Выбор шунта.
Выбираем шунт 75ШСМ:
Таблица 2.15
Технические данные шунта 75ШСМ
Параметр и единица измерения |
Значение |
Номинальный постоянный ток, А |
100 |
Активное сопротивление, мкОм |
187,5 |
Составление структурной схемы модели привода авк с системой подчиненного регулирования.
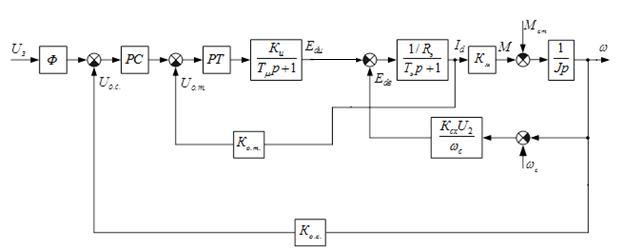
Рис. 3.1. Структурная схема модели привода АВК с СПР.
Асинхронный
двигатель (см. рис 3.1) представлен на
схеме модели привода электрической
составляющей - апериодическое звено
 и
механической составляющей - интегрирующее
звено
и
механической составляющей - интегрирующее
звено
 ,
где объект регулирования с моментом
инерции
,
где объект регулирования с моментом
инерции
 представлен одной массой. Коэффициент
представлен одной массой. Коэффициент
 учитывает непостоянство выпрямленной
эдс ротора с изменением скорости
двигателя. Коэффициент
учитывает непостоянство выпрямленной
эдс ротора с изменением скорости
двигателя. Коэффициент
 связывает выпрямленный ток в цепи ротора
с моментом на валу двигателя.
связывает выпрямленный ток в цепи ротора
с моментом на валу двигателя.
Тиристорный
преобразователь - инвертор представлен
апериодическим звеном с некомпенсируемой
постоянной времени
 .
.
В структурной схеме построена система управления по принципу подчиненного регулирования с контурами регулирования выпрямленного тока ротора и скорости.

Рис. 3.2. Схема модели привода при динамическом торможении.
Система подчиненного регулирования при динамическом торможении также двухконтурная, асинхронный двигатель и тиристорный преобразователь представлены апериодическими звеньями.