

3.4.15. Генератори прямокутних імпульсів
В
колі додатного зворотного зв’язку
генераторів прямокутної форми зазвичай
використовуються резистори R1,
R2,
які задають значення коефіцієнта β
його передавання (рис.
3.27.а) β=
R1/(R1+R2).
Вихідна напруга такого генератора
періодично змінюється між Двома
значеннями напруги, що визначаються
напругами насичення
![]() або
або
![]() ОП. Часи t1
та t2
перебування
ОП в стані
або
визначаються сталою RC-ланки,
коефіцієнтом передавання
β кола ДЗЗ
та значеннями напруг
,
ОП. Часи t1
та t2
перебування
ОП в стані
або
визначаються сталою RC-ланки,
коефіцієнтом передавання
β кола ДЗЗ
та значеннями напруг
,
![]() (3.64)
(3.64)
Рис.3.27 – схеми генераторів сигналів прямокутної та трикутної форми
![]() (3.65)
(3.65)
Період Т генерованих імпульсів визначатиметься сумою часів t1 і t2 і за умови повної симетрії | |=| |
Т=1/f= t1+t2=2RCln(1+2 R1/R2). (3.66)
3.4.16. Генератори трикутних імпульсів
Найпростіша схема генератора трикутних імпульсів така ж, як і схема генератора прямокутних імпульсів (рис. 3.27.а). Однак, значення коефіцієнта передавання β кола ДЗЗ менша, ніж в генераторі прямокутних імпульсів, що дає можливість уникнути насичення ОП. Розрахунок параметрів генератора трикутної напруги здійснюється за формулами (3.63), (3.64) за умови, що значення напруг перемикання напряму протікання зарядного струму конденсатора С менше від значення напруги насичення ОП , . За умови використання двох ОП, один з яких DA1 є компаратором, а другий DA2 інвертором, є можливість у точці «а» отримувати сигнал напруги прямокутної форми, а у точці «б» - трикутної форми (рис. 3.27.б, рис. 3.27.в). Амплітуда вихідного трикутного сигналу визначається відношенням опорів резисторів R2/R1, а частота – сталою часу RC-ланки.
4. Інтегральні ацп та цап
4.1. Аналого-цифрове перетворення
Як було зазначено вище, основним та найважливішим вузлом будь-яких цифрових вимірювальних засобів є АЦП, від метрологічних параметрів якого прямо залежать параметри вимірювального засобу в цілому. При аналого-цифровому перетворенні у загальному випадку виконуються операції дискретизації вимірюваної величини в часі, квантування її за рівнем та кодування у певній системі числення.
У дискретизованому сигналі відсутні проміжні значення вхідного сигналу між мітками часу ti та ti+1. Завдяки цьому може втрачатися вимірювальна інформація про проміжні значення сигналу, тобто виникає похибка від дискретизації. Крім того, завжди існує певна, не нульова, тривалість аналого-цифрового перетворення сигналу, яка залежить від використовуваного методу перетворення та швидкодії елементної бази АЦП [].
Тому під час дискретизації сигналу можна розглядати дві часові характеристики цього процесу: (1) – часовий інтервал поміж між почерговими вимірюваннями сигналу (при сталому часі його називають періодом дискретизації сигналу Tд=ti+1-ti); і (2) – інтервал часу Tа/ц аналого-цифрового перетворення сигналу – час, який необхідно затратити, щоб отримати один цифровий результат вимірювання сигналу. Відповідно до цього при цифрових вимірюваннях розглядають похибки двох різновидів (рис. 4.1):
1) похибка Т (t), що пов’язана зі зміною вимірюваного сигналу за час між окремими вибірками (інтервал дискретизації);
2) похибка А / Ц(t), що пов’язана зі зміною сигналу за час його аналого-цифрового перетворення.
При відомому періоді дискретизації перша складова похибки однозначно залежить від властивостей зміни вимірюваного сигналу і способу наступного використання результатів його вимірювань [].
Якщо до отримання наступної вибірки Хi+1 за поточне значення сигналу x(t) приймається стале значення, яке дорівнює значенню попередньої вибірки Хi (відтворення сигналу подібною до сходинок функцією (рис. 4.2)), то найбільша похибка пропорційна до найбільшої швидкості зміни сигналу на проміжку ti t<ti+1 між почерговими вибірками
дс(Т) х(t) maxT. (4.1)
Рис.
4.1.
До похибок дискретизації при
аналого-цифровому перетворенні
Значення цієї похибки можна зменшити, якщо зачекати до моменту часу ti+1 отримання наступної вибірки Хi+1 і апроксимувати залежність зміни сигналу між почерговими вимірюваннями лінійною функцією (рис. 4.2).
В цьому випадку максимальне значення похибки залежить від максимальної другої похідної сигналу (при лінійній зміні сигналу похибка відсутня)
![]() (4.2)
(4.2)
і
для гармонійного сигналу, для якого
x (t)max = 2xm,
максимальна динамічна похибка від
дискретизації не перевищує значення
![]() .
.
Приклад. При цифровому вимірюванні значень змінної напруги частотою 50 Гц при частоті дискретизації Tд = 1 мс (20 значень за період) віднесені до амплітуди сигналу похибки дискретизації сигналу становлять дс(Т / хmmax T = 250 1 103 0,314 31% при відтворенні східчастоподібною функцією і дл(Т) |xmmax| 0,5(T / 2)2= = 0,5(50 · 1 · 10-3)2 0,012 = 1,2% – при відтворенні сигналу лінійною функцією.
Рис.
4.2.
Похибка дискретизації при відтворенні
сигналу лінійними функціями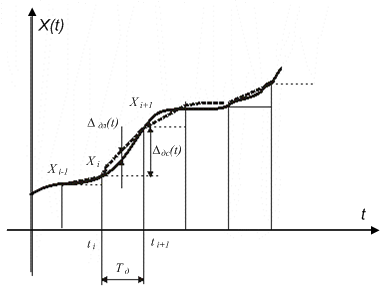
Однак при цьому, для відтворення проміжних значень сигналу необхід-но здійснити затримку на інтервал часу рівний пері-оду дискретизації. Якщо результати вимірювань використовують для керування якимось процесом, то така затримка може бути небажаною або, навіть, недопустимою.