

3. Задачи автоматического управления и принципы
регулирования
3.1. Задачи управления
В зависимости от характера информации, получаемой об объекте в процессе его работы, наличия его математического описания, статических характеристик объекта и, главное, задачи, поставленной перед САУ, принципы автоматического управления существенно различаются. Если при рассмотрении объектов управления был получен ответ на вопрос, чем управлять, то теперь ставятся вопросы: с какой целью, как, какими средствами управлять объектом? Задачи, поставленные перед системой управления, можно разделить на следующие группы:
1. Стабилизация. В этом случае необходимо с заданной точностью поддерживать постоянными те или иные управляемые величины .
2. Программное управление. При этом закон изменения управляемой величины заранее известен и задаётся оператором, обслуживающим систему управления.
3. Слежение за некоторой измеряемой величиной, закон изменения которой заранее неизвестен. В этом случае управляемая величина должна с заданной точностью воспроизводить измеряемую величину или некоторую функцию измеряемой величины. Такие системы называются следящими.
4. Самонастройка (адаптация) системы на оптимум какого-либо из показателей объекта или системы. Это может быть обеспечение:
а) экстремального значения управляемой величины;
б) максимального быстродействия системы управления путём подстройки её параметров;
в) режима работы объекта, оптимального в определённом заданном смысле, и т.д.
Самонастройка может сочетаться со стабилизацией, программным управлением и слежением.
3.2. Принципы регулирования
3.2.1. Принцип регулирования по отклонению управляемой величины
Этот принцип впервые использовал И.И.
Ползунов в регуляторе постоянства
уровня жидкости в резервуаре. В этом
случае оператор получает информацию
об уровне жидкости
и в зависимости от отклонения уровня
от требуемого значения
![]() изменяет
положение клапана, регулирующего приток
жидкости
(рис. 3.1, а).
изменяет
положение клапана, регулирующего приток
жидкости
(рис. 3.1, а).
3.2.2. Принцип регулирования по возмущению
В этом случае оператор не получает информации об уровне жидкости, но зато знает, как этот уровень изменяется с изменением расхода жидкости из резервуара. Измеряя расход жидкости , он вычисляет необходимое положение клапана, регулирующего приток жидкости и устанавливает соответствующее открытие клапана. Этот принцип был предложен французским братьями и учёным Ж. и С. Понселе и впервые реализован на практике во второй половине XIX века русским электротехником В. Н. Чиколевым в разработанных им регуляторах силы света дуговых ламп.
Функции человека-оператора успешно и с большими скоростями действия выполняются автоматическими устройствами – регуляторами. Возможна комбинация обоих принципов в одной САУ.
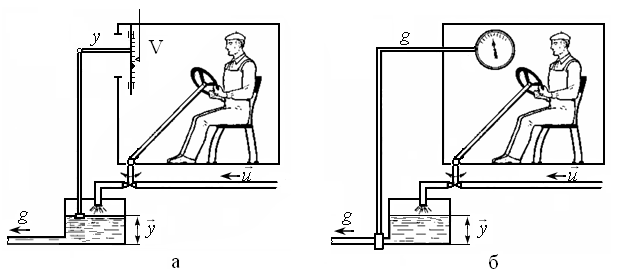
Рис. 3.1. Схемы, иллюстрирующие принципы регулирования по отклонению управляемой величины (а) и по возмущению (б)
4. Системы автоматического регулирования
4.1. Общая структурная схема регулятора
Возмущения
и
воздействуют на регулируемый объект,
отклоняя его регулируемый параметр
от нормы (рис. 4.1). Чувствительный элемент
реагирует на изменение величины
регулируемого параметра и передаёт
импульс (сигнал) в сравнивающее устройство.
Сравнивающее устройство, с одной
стороны, получает от чувствительного
элемента начальный импульс (сигнал) о
величине
параметра процесса, а с другой стороны
получает от задающего устройства
заданное (допустимое) значение
регулируемого параметра
![]() .
Допустимое отклонение регулируемого
параметра от нормы устанавливается в
регуляторе задающим устройством. Обычно
величина отклонения регулируемого
параметра устанавливается в задающем
устройстве вручную один раз на всю
продолжительность процесса. Сигнал от
сравнивающего устройства поступает в
управляющее устройство, которое
выполняется двух типов: 1) c
усилительным устройством и с преобразующим
устройством; 2) только с преобразующим
устройством.
.
Допустимое отклонение регулируемого
параметра от нормы устанавливается в
регуляторе задающим устройством. Обычно
величина отклонения регулируемого
параметра устанавливается в задающем
устройстве вручную один раз на всю
продолжительность процесса. Сигнал от
сравнивающего устройства поступает в
управляющее устройство, которое
выполняется двух типов: 1) c
усилительным устройством и с преобразующим
устройством; 2) только с преобразующим
устройством.
П
Рис.
4.1. Общая структурная схема регулятора
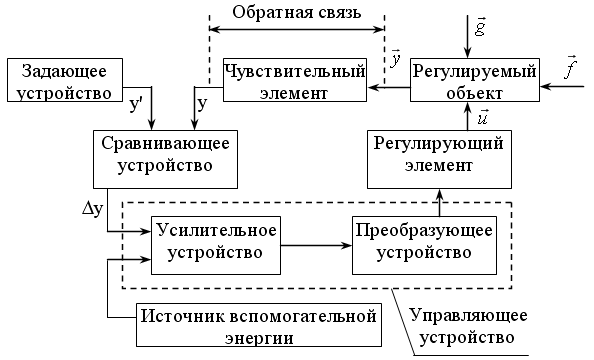
Регулирующий элемент производит управляющее воздействие на объект в соответствии с импульсом от управляющего устройства, увеличивая или уменьшая количество поступающего вещества или энергии, чтобы привести отклонение регулируемого параметра к норме, установленной в задающем устройстве.
Примеры. Чувствительными элементами могут являться термопара, поплавок, фотоэлемент, тензо- и пьезометрические датчики и т.д.
Усилители: магнитный, транзисторный, электронный, механический, электромашинный, золотниковый.
Преобразующие устройства: электродвигатели, электромагниты, гидро- и пневмоцилиндры.
Регулирующие элементы: заслонки, клапана, реостаты, задвижки, рули и т.д.