

2.2. Понятие о статических характеристиках объекта управления
Каждый объект управления может рассматриваться в условиях статики и динамики. В статическом состоянии внешние неуправляемые воздействия и и управляющие воздействия рассматриваются постоянными, не зависящими от времени. Характеристиками объекта являются зависимости управляемых величин от внешних воздействий
![]() {
{
![]() }.
(1)
}.
(1)
Здесь
![]() некоторая в общем случае нелинейная
векторная функция не зависящих от
времени переменных
,
,
.
некоторая в общем случае нелинейная
векторная функция не зависящих от
времени переменных
,
,
.
Если объект подвержен гармоническим воздействиям, то в установившемся режиме он также может быть описан соотношением не зависящих от времени величин, например, амплитудами и фазами гармонических воздействий. В этом случае его рассмотрение также сводится к анализу уравнения (1).
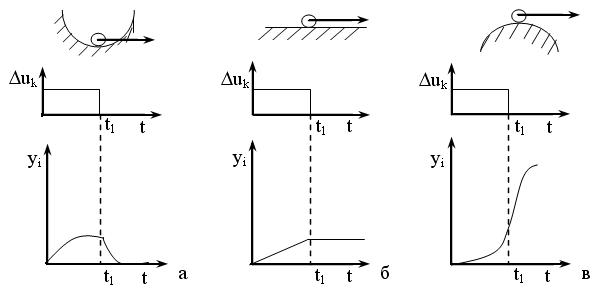
При изучении статики основной интерес представляет зависимость управляемых координат от управляющего воздействия , называемая статической характеристикой управления. Характеристики
управления
![]() могут быть монотонными, когда
могут быть монотонными, когда
![]() нигде не меняет знака (рис. 2.3, а, б) и
немонотонными (экстремальными), когда
при некоторых обычно оптимальных
значениях управляющей координаты
нигде не меняет знака (рис. 2.3, а, б) и
немонотонными (экстремальными), когда
при некоторых обычно оптимальных
значениях управляющей координаты
![]() производная
производная
![]() ,
а справа и слева от этого значения имеет
различный знак (рис. 2.3, в).
,
а справа и слева от этого значения имеет
различный знак (рис. 2.3, в).
При изучении динамики исследуется
зависимость
![]() при заданных изменениях внешних
воздействий
при заданных изменениях внешних
воздействий
![]() ,
,
![]() ,
,
![]() или их статических характеристик. При
этом уравнение (1) принимает вид
или их статических характеристик. При
этом уравнение (1) принимает вид
![]() {
},
(2)
{
},
(2)
г де
де
![]() – некоторый в общем случае нелинейный
векторный оператор, дающий возможность
при известных функциях времени
,
,
определить
.
– некоторый в общем случае нелинейный
векторный оператор, дающий возможность
при известных функциях времени
,
,
определить
.
Если контролируемых координат
и
![]() достаточно для того, чтобы однозначно
определить состояние объекта
,
то объект называется полностью
наблюдаемым. Если с помощью управляющих
воздействий
можно однозначно задать состояние
объекта, то объект называется полностью
управляемым.
достаточно для того, чтобы однозначно
определить состояние объекта
,
то объект называется полностью
наблюдаемым. Если с помощью управляющих
воздействий
можно однозначно задать состояние
объекта, то объект называется полностью
управляемым.
Если система уравнений, описывающих состояние объекта, может быть сведена к системе линейных дифференциальных уравнений, то объект называется линейным. При описании объекта системой нелинейных дифференциальных уравнений его относят к нелинейным.
2.3. Понятие об устойчивом, неустойчивом и нейтральном объекте управления
Объект управления может быть устойчивым, неустойчивым и нейтральным.
Объект устойчив, если после кратковременного
внешнего воздействия, например
![]() ,
он с течением времени
,
он с течением времени
![]() возвращается к исходному состоянию или
близкому к нему (рис. 2.4, а).
возвращается к исходному состоянию или
близкому к нему (рис. 2.4, а).
Нелинейные объекты могут быть устойчивы в “малом” или “большом” – при воздействиях, не выходящих за определённые пределы, и неустойчивы в “целом” при больших воздействиях. Этими вопросами занимается новая наука синэргетика.
Если в устойчивом объекте воздействие,
например
![]() ,
имеет продолжительность
,
имеет продолжительность
![]() (рис. 2.4, а), то управляемая координата
(рис. 2.4, а), то управляемая координата
![]() по истечении некоторого времени
по истечении некоторого времени
![]() возвращается в исходное состояние или
близкое к нему. Устойчивые объекты
иногда называют объектами с
самовыравниванием. Для таких объектов
может быть предложена механическая
аналогия в виде шарика в лунке (рис. 2.4,
а).
возвращается в исходное состояние или
близкое к нему. Устойчивые объекты
иногда называют объектами с
самовыравниванием. Для таких объектов
может быть предложена механическая
аналогия в виде шарика в лунке (рис. 2.4,
а).
Н
Рис.
2.4. Графики устойчивого (а), нейтрального
(б), неустойчивого (в)
объектов
![]() ,
устанавливается новое состояние
равновесия, отличающееся от первоначального
и зависящее от произведенного воздействия.
Шарик на горизонтальной плоскости
является механической аналогией этого
типа объектов (рис. 2.4, б). Нейтральные
объекты иногда называют объектами без
самовыравнивания.
,
устанавливается новое состояние
равновесия, отличающееся от первоначального
и зависящее от произведенного воздействия.
Шарик на горизонтальной плоскости
является механической аналогией этого
типа объектов (рис. 2.4, б). Нейтральные
объекты иногда называют объектами без
самовыравнивания.
В неустойчивом объекте по окончании
воздействия
(как бы мало оно ни было) управляемая
координата
![]() продолжает изменяться. Для этих объектов
механическая аналогия имеет вид шарика
на вершине холма (рис. 2.4, в). Неустойчивые
объекты могут иметь статическую
характеристику, для снятия которой с
помощью специальных устройств они
приводятся в состояние искусственной
устойчивости.
продолжает изменяться. Для этих объектов
механическая аналогия имеет вид шарика
на вершине холма (рис. 2.4, в). Неустойчивые
объекты могут иметь статическую
характеристику, для снятия которой с
помощью специальных устройств они
приводятся в состояние искусственной
устойчивости.
Один и тот же объект при нелинейной его характеристике может находиться в зависимости от режима работы в устойчивом и неустойчивом состоянии. Процессы в объектах могут изучаться при регулярных и случайных внешних воздействиях.
Пример объекта управления и его описания (рис. 2.2).
Управляющим воздействием
является приток воды
![]() ,
притекающей в резервуар; управляемой
величиной
– уровень
,
притекающей в резервуар; управляемой
величиной
– уровень
![]() воды врезервуаре, а внешним воздействием
расход воды
воды врезервуаре, а внешним воздействием
расход воды
![]() ,
вытекающей из резервуара. Между величинами
,
и
имеется зависимость:
,
вытекающей из резервуара. Между величинами
,
и
имеется зависимость:
,
(3)![]()
где
![]() – площадь поперечного сечения резервуара.
– площадь поперечного сечения резервуара.
Это уравнение представляет собой
описание объекта. Объект является
линейным, т.к. описывается линейным
дифференциальным уравнением. Объект
нейтрален, т.к. при
![]() ,
,
![]() и
и
![]() кратковременное увеличение, например
притока
кратковременное увеличение, например
притока
![]() ,
после снижения его до нуля приведёт к
повышению уровня
и переходу к новому состоянию
,
после снижения его до нуля приведёт к
повышению уровня
и переходу к новому состоянию![]() ,
что соответствует графику нейтрального
объекта.
,
что соответствует графику нейтрального
объекта.
Т
Рис. 2.5. Графики
характеристик объекта управления в
виде
резервуара
с жидкостью
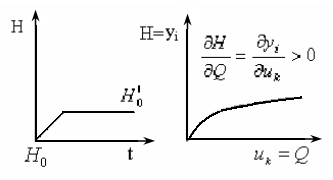
![]() ,
то статическая характеристика является
монотонной. Объект односвязный т.к.
характеризуется одной управляющей Q
и одной управляемой величиной Н,
которые имеют по одной координате.
,
то статическая характеристика является
монотонной. Объект односвязный т.к.
характеризуется одной управляющей Q
и одной управляемой величиной Н,
которые имеют по одной координате.