

13. Регулирующие элементы
Регулирующий элемент (орган) САР предназначен для непосредственного воздействия на объект регулирования обычно путём изменения либо количества, либо качества подводимой к объекту регулируемой среды или энергии.
Выбор регулирующего элемента обычно определяется следующими основными факторами:
– физическими свойствами регулируемой среды;
– требуемым характером воздействия на регулируемую среду;
– надёжностью.
Регулирующие элементы также делятся на неэлектрические и электрические. К неэлектрическим относят дроссельные заслонки (задвижки); клапаны и вентили; комбинированные устройства. К электрическим относят реостаты с переменным сопротивлением; постоянные сопротивления с током переменной величины; фазовращатели и другие элементы.
Фазовращатели преобразуют входную величину в фазовый сдвиг выходного переменного напряжения.
Приложения
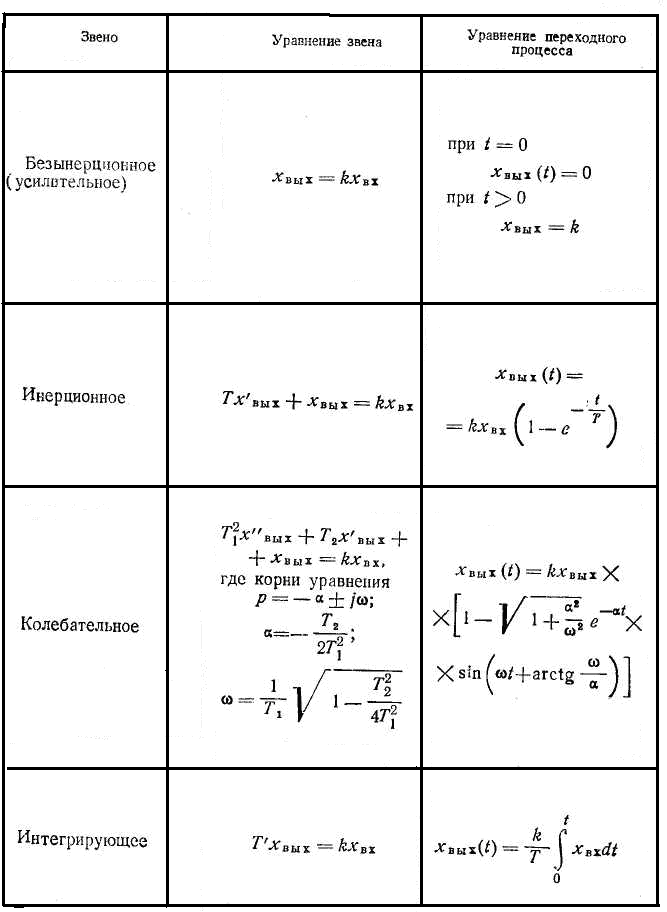
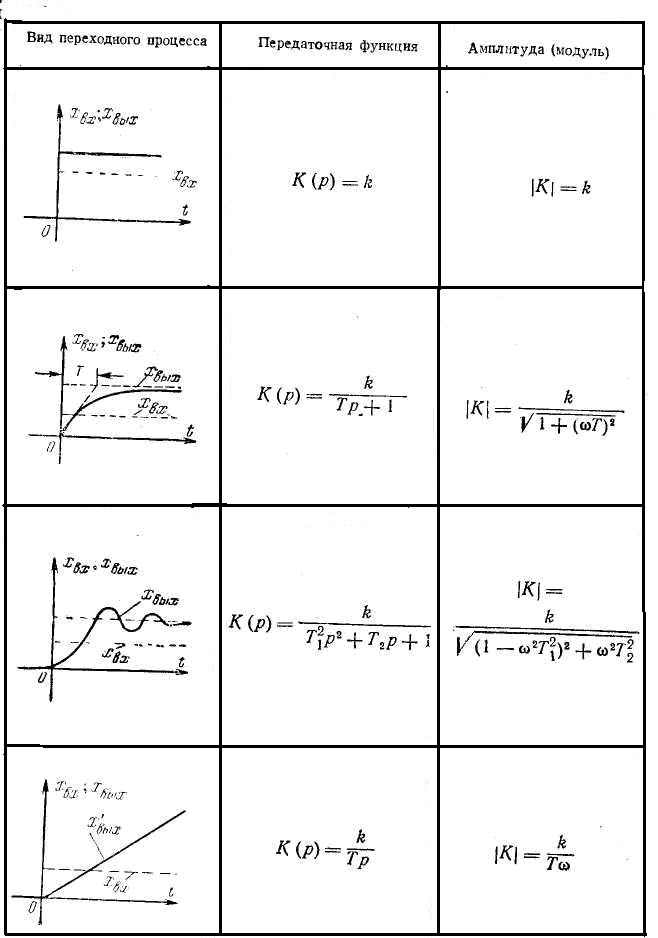
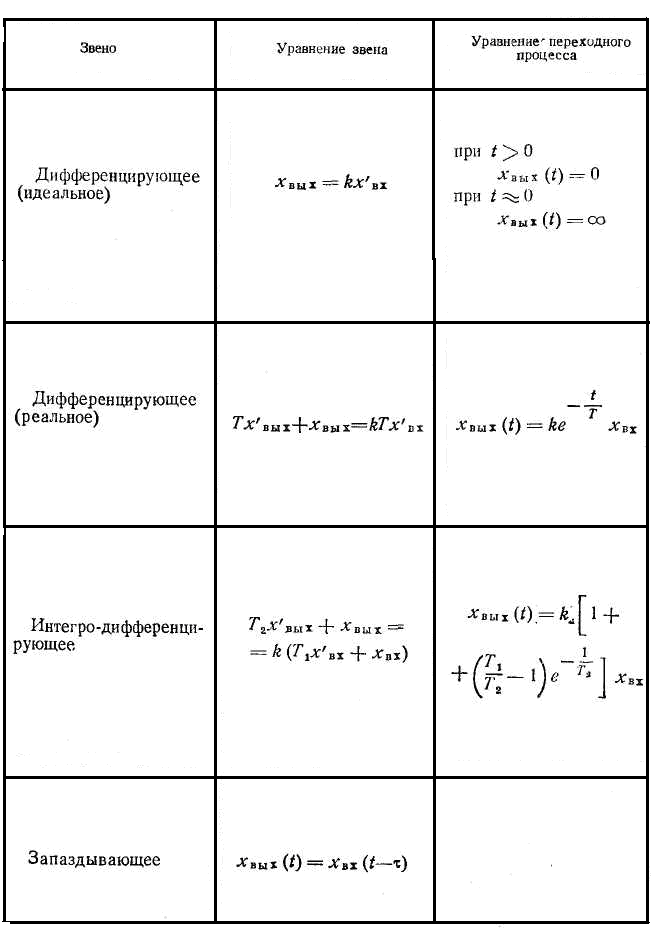
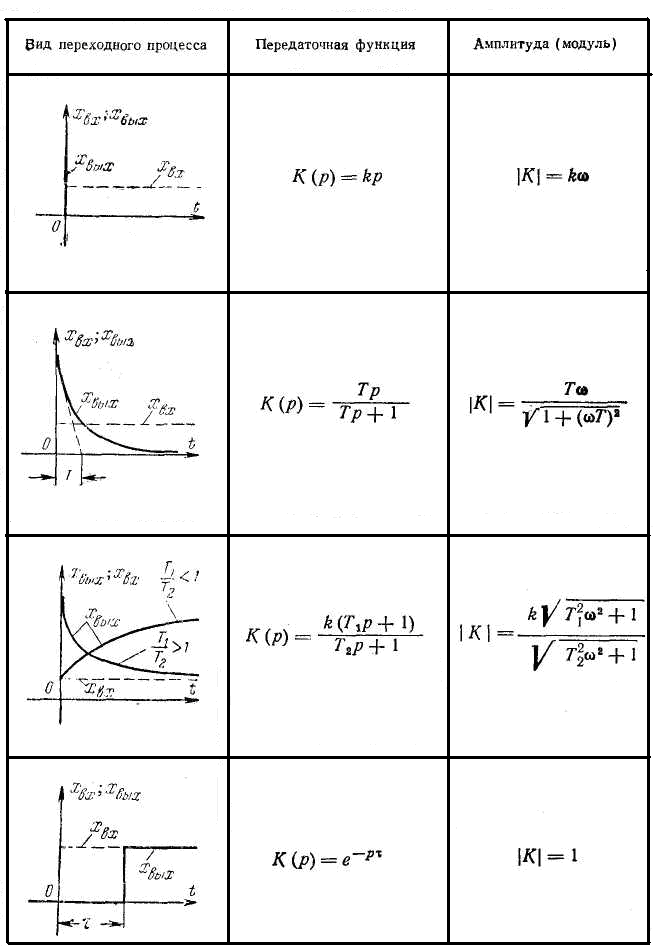
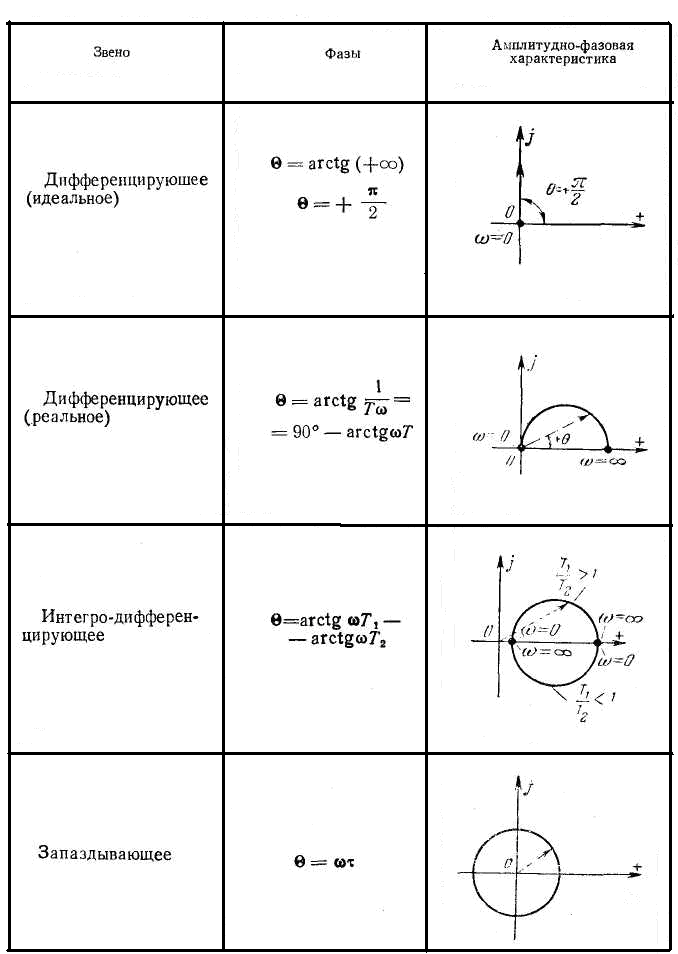
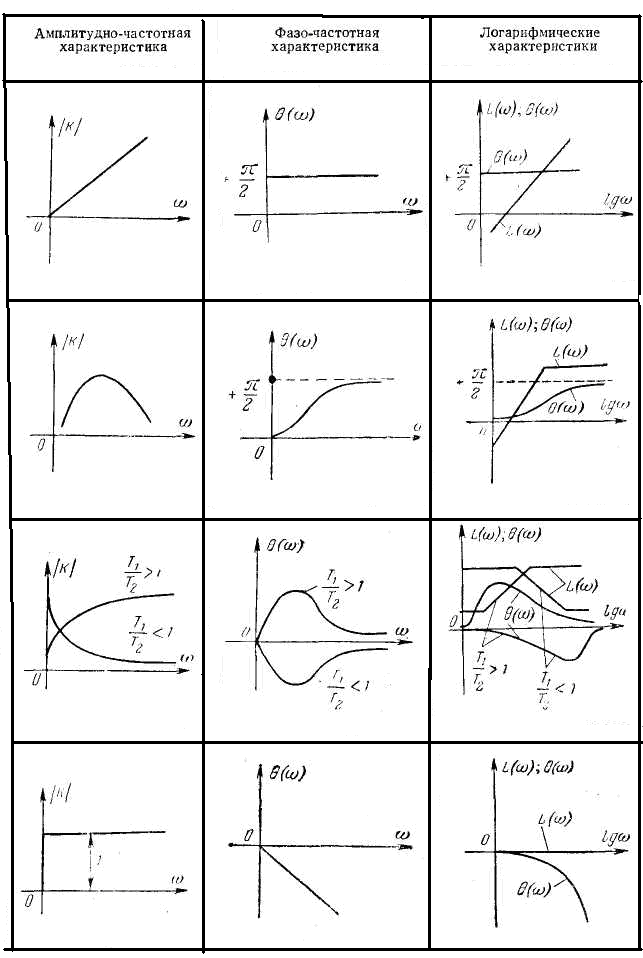
П. 1. Характеристики основных динамических звеньев САУ
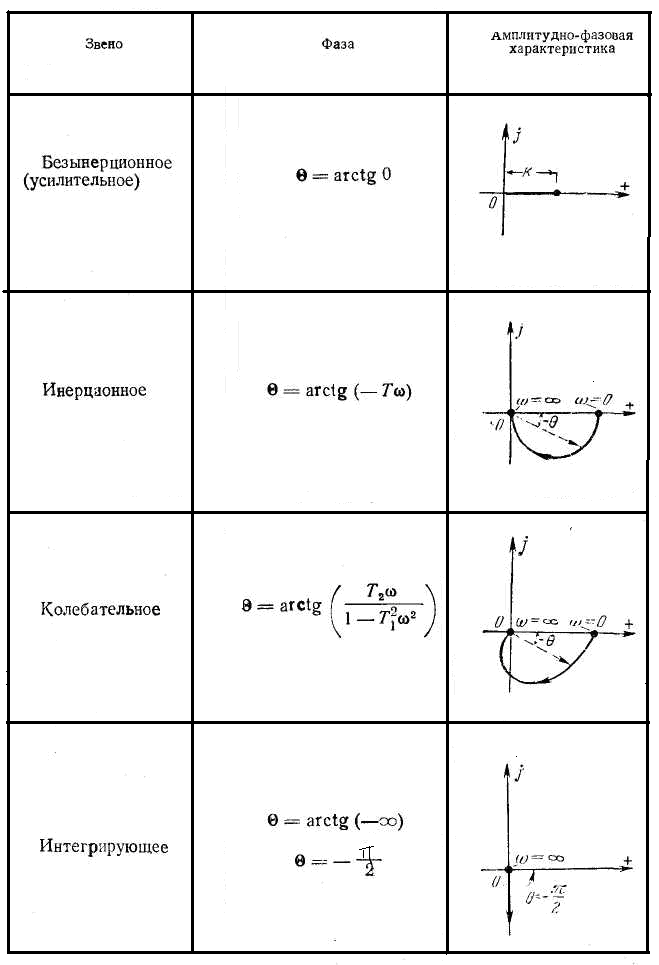
Продолжение П. 1
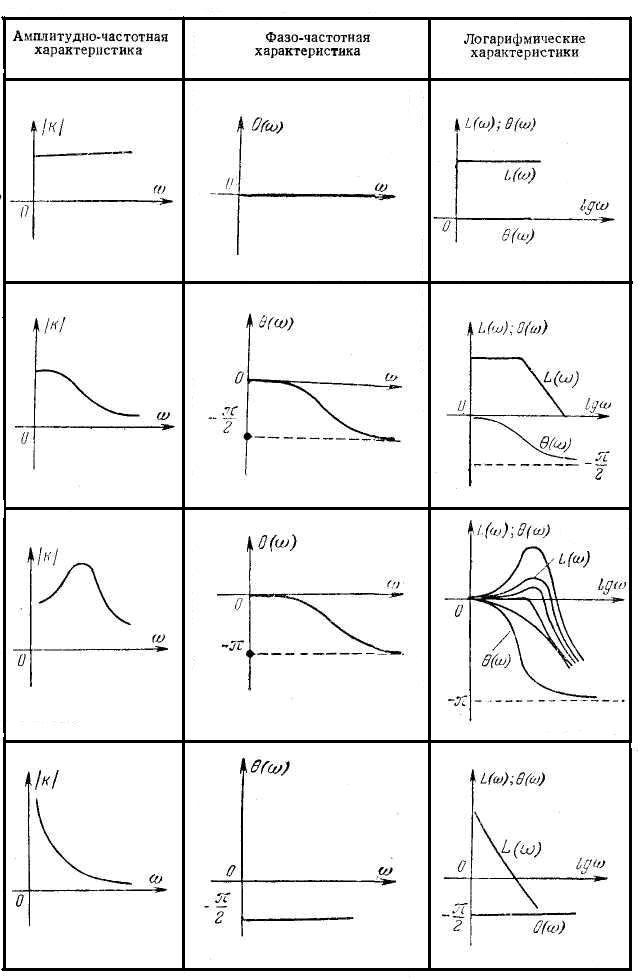
Продолжение П. 1
Продолжение П. 1
Продолжение П. 1
Продолжение П. 1
Продолжение П. 1
Продолжение П. 1
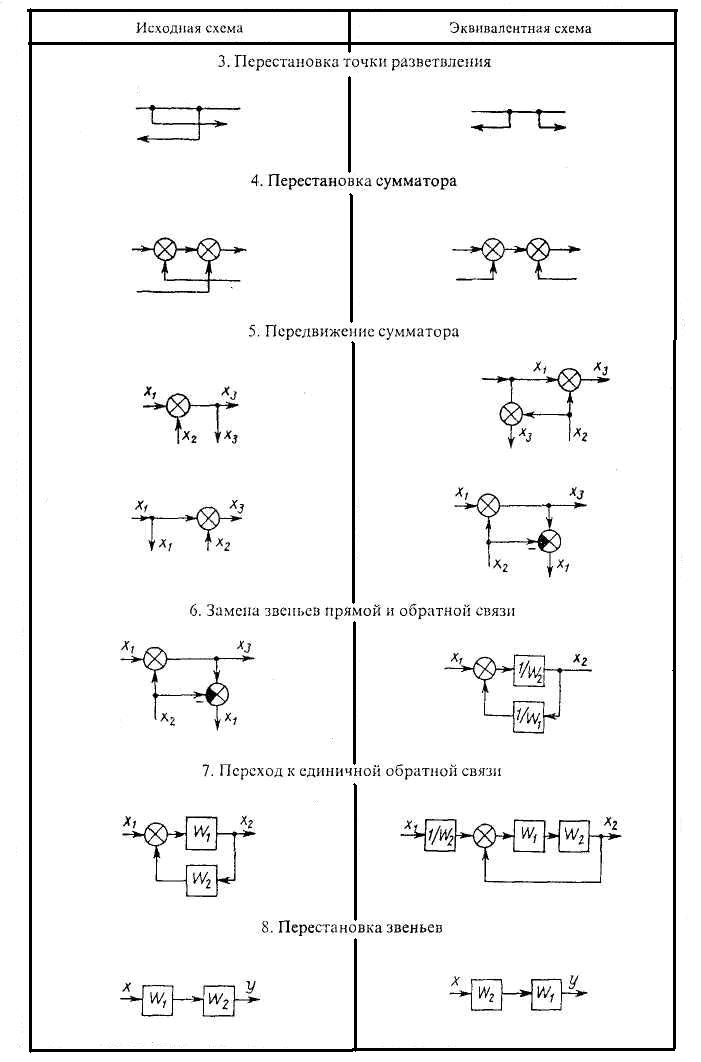
П. 2. Правила структурных преобразований
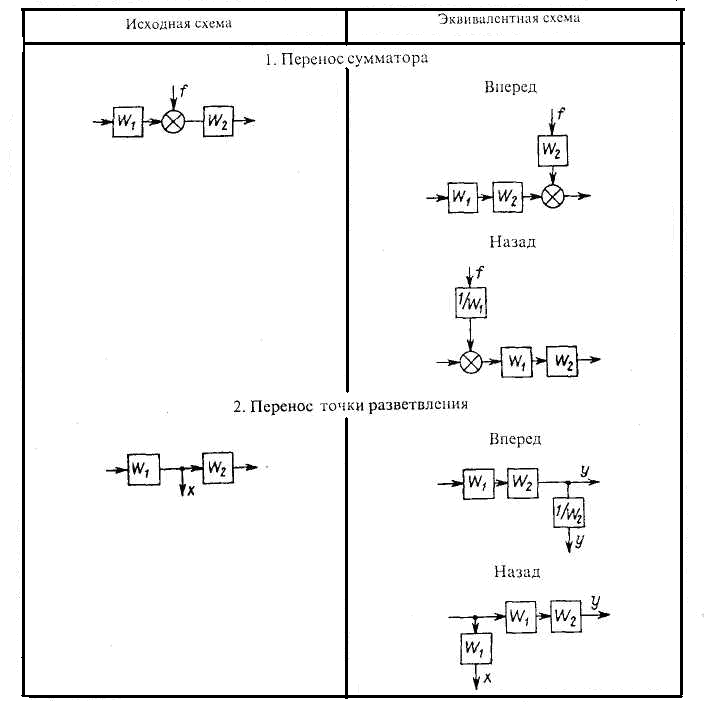
Продолжение П. 2
П. 3. Алгебра W(s). Соответствие структурных схем графам
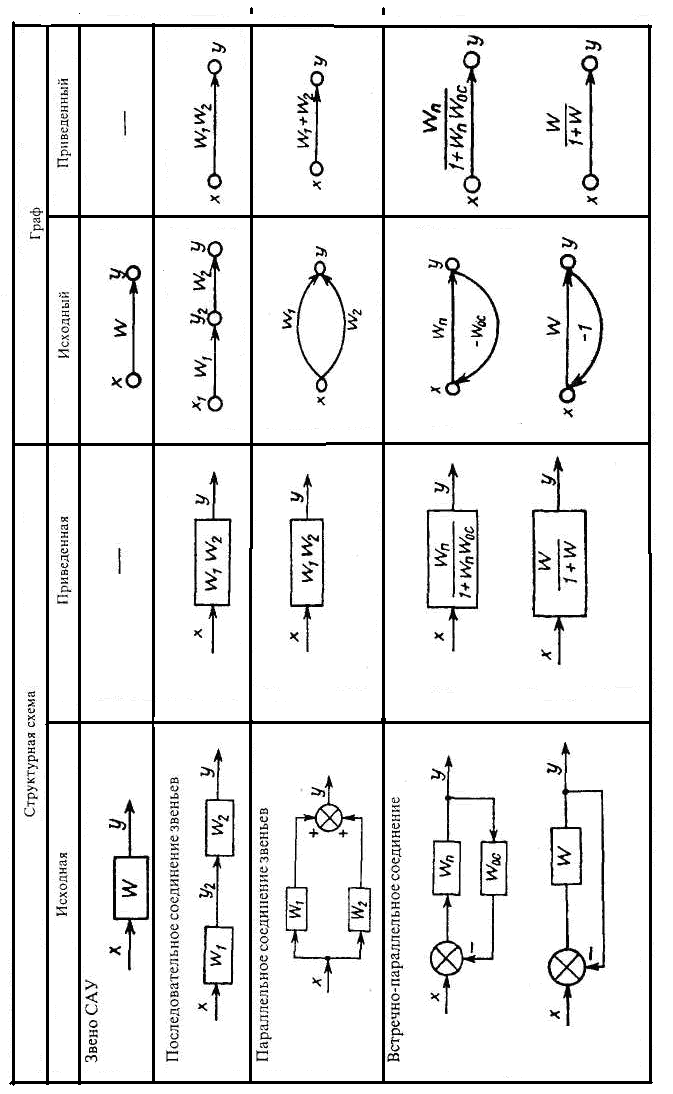
Продолжение П. 3
П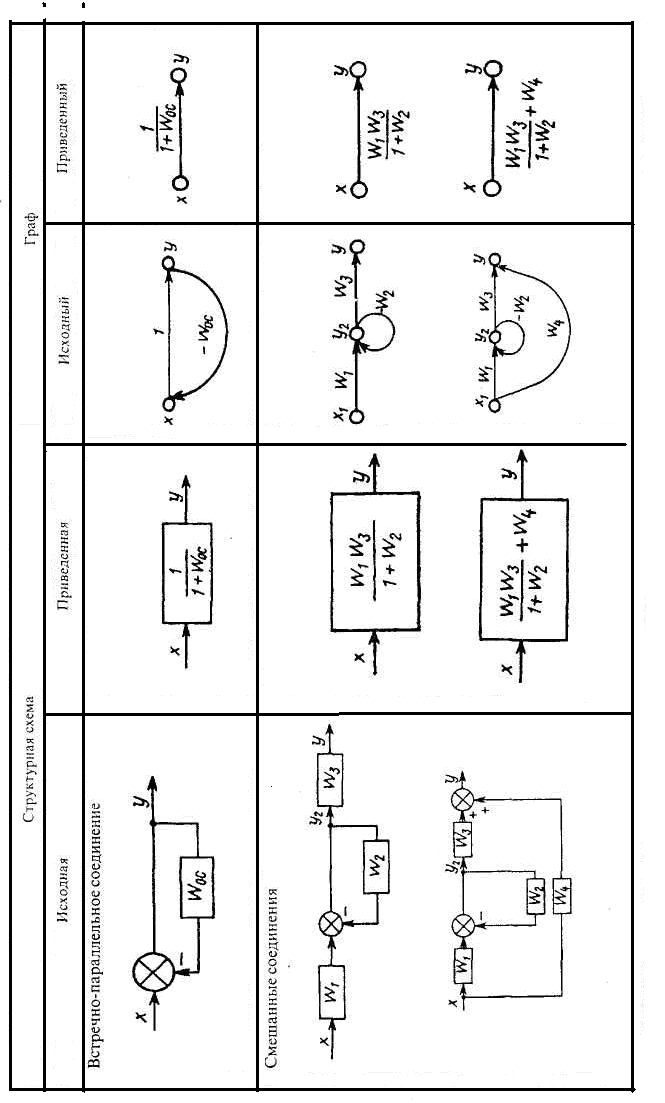 родолжение
П.3
родолжение
П.3
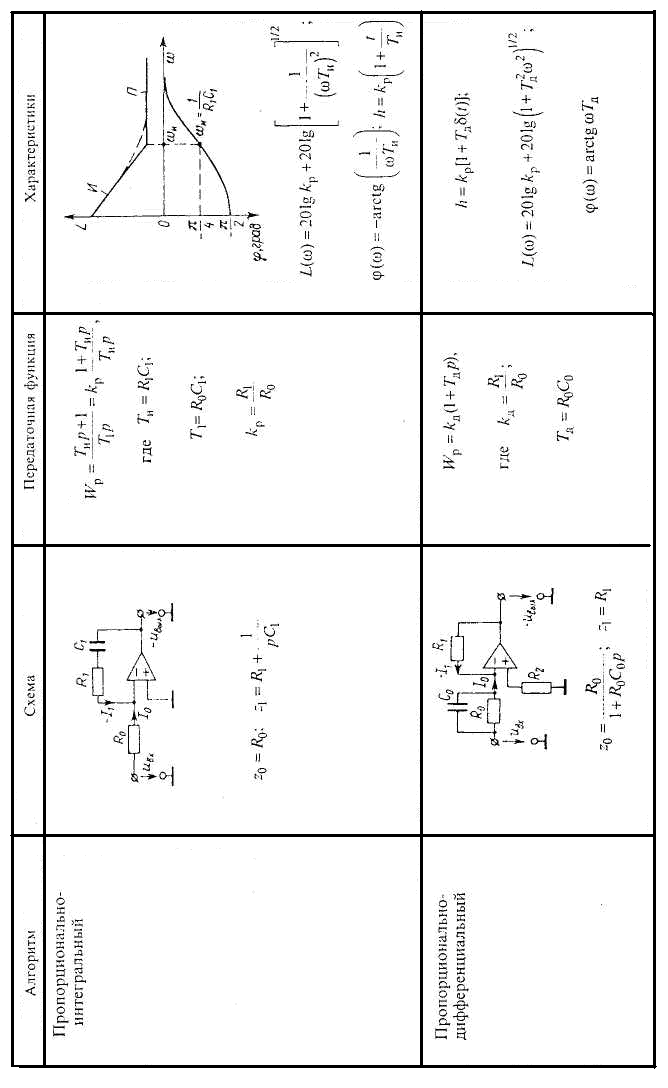
П. 4. Электронные регуляторы
П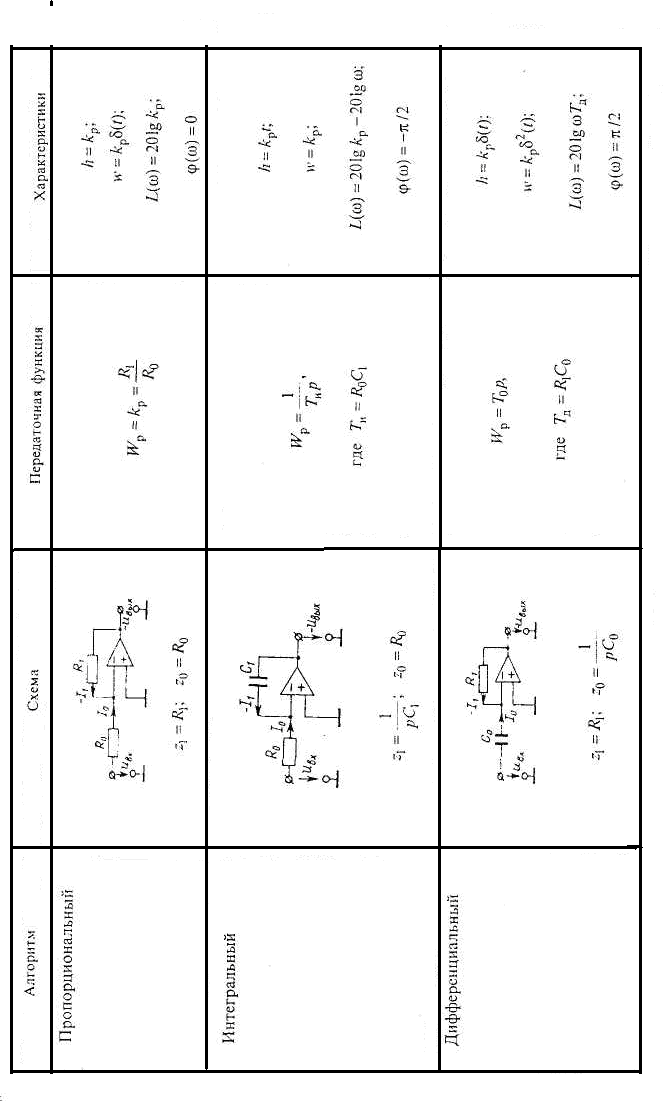 .4.
Электронные регуляторы
.4.
Электронные регуляторы
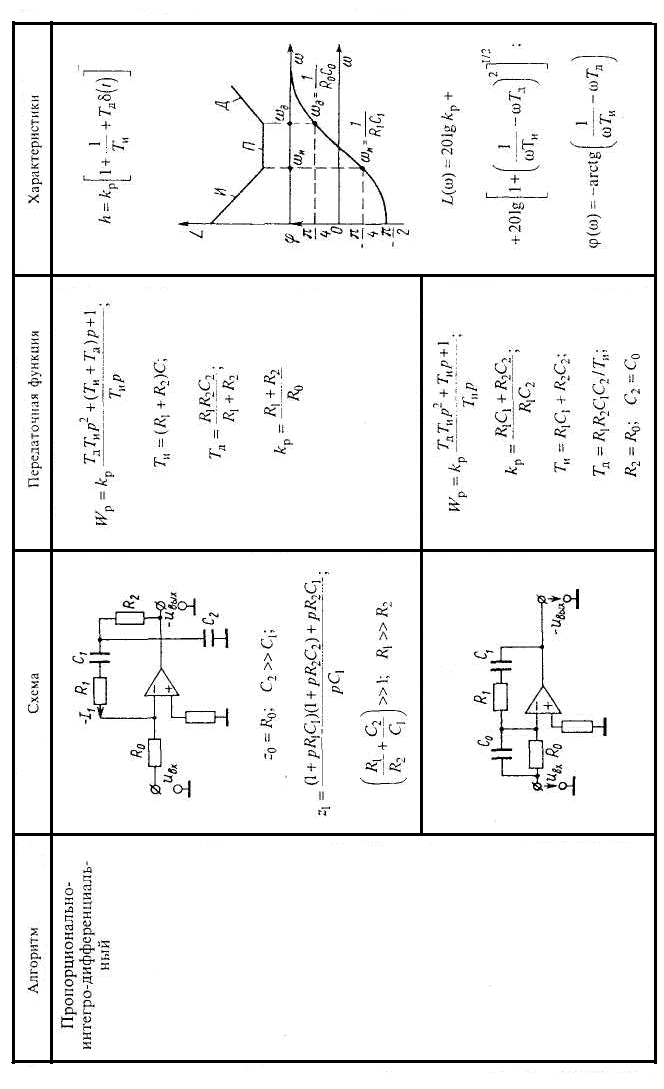
Продолжение П.4
Продолжение П.4
Литература
Беликов О. А. Приводы литейных машин / Беликов О.А., Каширцев Л.П. – М.: Машиностроение, 1971. – 311 с.
Егоров К.В. Основы теории автоматического регулирования: учебное пособие. – М.: Энергия, 1967. – 648 с.
Камнев В.М. Чтение схем и чертежей электроустановок: учебное пособие. – М.: Высшая школа, 1986. – 144 с.
Основы автоматического регулирования и управления: учебное пособие / под редакцией В.М. Пономарёва и А.П. Литвинова. – М.: Высшая школа, 1974. – 439 с.
Основы теории автоматического регулирования: учебник / под редакцией В.И. Крутова. – М.: Машиностроение, 1984. – 368 с.
Титов Н.Д. Основы автоматизации литейного производства и вычислительная техника: учебное пособие / Титов Н.Д., Сергеев Л.Н. – М.: Машиностроение, 1983. – 151 с.
Теория автоматического управления: учебник / под редакцией А.В. Нетушила. – М.: Высшая школа, 1967. – 424 с.
Солодовников В.В. Основы теории и элементы систем автоматического регулирования: учебное пособие – М.: Машиностроение, 1985. – 536 с.
Клюев А.С. Автоматическое регулирование. – М.: Энергия, 1973. – 392 с.
Иващенко Н.Н. Автоматическое регулирование: учебник. – М.: Машиностроение, 1978. – 736 с.
Теория автоматического управления: учебник / под редакцией Ю.М. Соломенцева. – М.: Высшая школа, 2000. – 268 с.
Теория автоматического управления: учебник / под редакцией А.В. Нетушила. – М.: Высшая школа, 1976. – 400 с.
13. Ерофеев А.А. Теория автоматического управления: учебник. – СПб: Политехника, 2005. - 302 с.
14. Анхимюк В.Л. Теория автоматического управления: учебник.- Минск: Высшэйшая школа, 1979. - 32 с.
15. Левшин Г.Е. Управление техническими системами: учебное пособие / Барнаул: изд-во АлтГТУ, 2005. – 66 c.