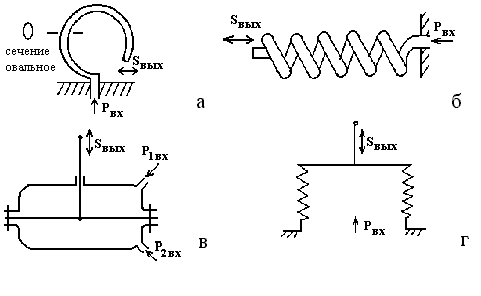
10.5.3. Пружинные датчики
1. Трубчатые одновитковые (трубка Бурдона).
Изготовляют из латуни и других медных сплавов, а для высоких давлений из хромоникелевых сплавов. Погрешность от 0,2 до 4%. Пределы измерений от 100 кПа до 1000 МПа (рис. 10.7, а).
2. Трубчатые многовитковые (геликоидальные).
Обеспечивают большее перемещение свободного конца и развивают большее усилие. Предел измерения до 160 МПа (рис. 10.7, б).
3. Пластинчатые (мембранные).
Бывают с упругой мембраной из медных и хромоникелевых сплавов и мягкой мембраной из резины. Предел измерений до 2,5 МПа (рис. 10.7, в).
4. Гармониковые (сильфонные).
И
Рис. 10.7. Пружинные
датчики:
а – трубчатый
одновитковый (трубка Бурдона); б –
трубчатый многовитковый (геликоидальный);
в – пластинчатый (мембранный);
г – гармониковый
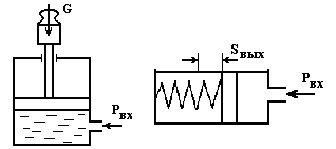
10.5.4. Поршневые приборы
Разделяют на грузопоршневые и пружиннопоршневые.
Грузопоршневые (рис. 10.8, а) как более
точные (классы точности 0,02; 0,05; 0,2)
применяют для градуировки и поверки
различного рода пружинных приборов до
1000 МПа. В технических измерениях
используются редко. Более распространены
пружинно-поршневые, использующие
линейную зависимость деформации
![]() пружины от давления
пружины от давления
![]() (рис.
10.8, б).
(рис.
10.8, б).
Рис. 10.8. Поршневые датчики:
а
– грузопоршневой;
б
– пружинно-поршневой
а
б
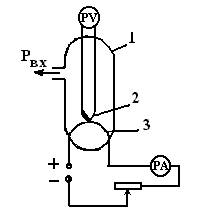
10.5.5. Комбинированные
Кольцевые
Основной частью этих приборов является
полое металлическое кольцо 1, опирающееся
остриём призмы 3 на неподвижную опору
и заполненное до половины жидкостью 4
(рис. 10.9, а). Внизу кольца закреплен груз
.
Перегородка 2 и жидкость в полости кольца
разделяют свободное пространство на
две половины I и II.
Если давление, например, в полости I
станет больше, чем в полости II,
то под действием разности![]() на перегородку 2 площадью
действует вращающий момент, равный
на перегородку 2 площадью
действует вращающий момент, равный
![]() ,
и кольцо поворачивается до тех пор, пока
возрастающий по мере его вращения
противодействующий момент груза
,
и кольцо поворачивается до тех пор, пока
возрастающий по мере его вращения
противодействующий момент груза
![]() не станет равным вращающему
моменту. Отсюда
не станет равным вращающему
моменту. Отсюда
![]() .
.
Пределы измерения до 1,6 кПа. Применяют для измерения тяги дымососов и напоров вентиляторов в качестве тягонапоромеров.
Колокольные
Здесь чувствительным элементом является колокол, погруженный в бак с трансформаторным маслом. Под колокол подают повышенное давление. Пределы измерений 40 – 400 Па по напору и по тяге 30 – 200 Па (рис. 10.9, б).
10.5.6. Электрический датчик теплового вакуумметра
Н аиболее
распространенный в литейном производстве
электрический датчик разрежения
применяется в тепловом вакуумметре
(рис. 10.10). Его действие основано на
зависимости теплопроводности разреженных
газов от давления.
аиболее
распространенный в литейном производстве
электрический датчик разрежения
применяется в тепловом вакуумметре
(рис. 10.10). Его действие основано на
зависимости теплопроводности разреженных
газов от давления.
О
Рис.
10.10. Электрический датчик
теплового вакуумметра: 1
– стеклянный баллон; 2 – термопара; 3 –
нагреватель