9.10.4. Согласно-параллельные корректирующие звенья
Эти звенья применяют при формировании алгоритмов управления, когда необходимо осуществить сложный закон управления с введением различных функций от ошибки ε, например, dε/dt, ∫εdt.
Введение производных
![]() и т.д. соответствует поднятию верхних
частот и преследует цель увеличить
запас устойчивости системы (рис. 9.26).
При этом для разных вариантов включения
дифференцирующих звеньев в схему
получают естественно разные формулы
для эквивалентных передаточных функций.
и т.д. соответствует поднятию верхних
частот и преследует цель увеличить
запас устойчивости системы (рис. 9.26).
При этом для разных вариантов включения
дифференцирующих звеньев в схему
получают естественно разные формулы
для эквивалентных передаточных функций.

Введение интегралов от ошибки управления ∫εdt соответствует поднятию низших частот и уменьшает значение установившейся ошибки управления (или делает ее равной 0).
9.10.5. Встречно-параллельные корректирующие звенья -обратные связи (ос)
Эти звенья получают все большее распространение из-за удобства технической реализации и следующих достоинств:
а) простоты из-за отсутствия усилителя, т.к. на вход элемента ОС поступает обычно сигнал высокого уровня с выхода САУ, который иногда даже ослабляют для согласования с входным сигналом;
б) возможности улучшения переходного процесса в САУ (по сравнению с другими соединениями корректирующих звеньев), т.к. на этот процесс влияют имеющиеся всегда в САУ нелинейности (силы трения, лифт, зазор, зона нечувствительности и т.д.), которые при охвате САУ отрицательной ОС существенно ослабляют свое влияние на процесс управления;
в) лучшего эффекта, который дают отрицательные обратные связи (ООС); когда в САУ вследствие действия внешних факторов (температуры, времени, вибраций и т.п.) изменяются параметры - коэффициенты усиления, постоянные времени и др., т.е. ООС стабилизирует параметры всей САУ или ее участка, охваченного ООС.
Недостатки параллельной коррекции: 1) более сложная схема включения; 2) необходимость применения согласующих элементов; 3) возможные перегрузки цепи, охваченной корректирующим контуром.
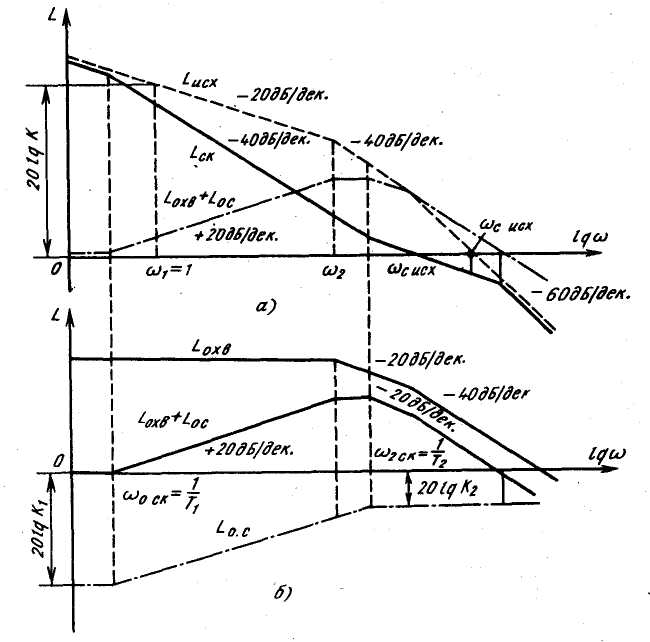
Рассмотрим методику синтеза системы с коррекцией обратными связями при графоаналитическом методе расчета. Комплексный коэффициент усиления для разомкнутой системы Кисх(j)=Кнеохв(j), а для скорректированной системы Кск(j)=Кнеохв(j)Кохв(j)/[1+Кохв(j)* *Ко.с(j)].
В диапазоне частот при Кохв((j)Ко.с(j)<<1 коэффициент Кск(j)≈Кнеохв(j)Кохв(j)=Кисх(j). Из последнего уравнения следует, что в указанном диапазоне частот корректирующее устройства не влияют на частотную характеристику системы, т.к. в этом случае характеристики исходной и скорректированной системы практически совпадают.
В диапазоне частот при Кохв(j)Ко.с(j)<<1
![]()
Из последнего равенства следует, что в указанном диапазоне частот влияние на частотную характеристику звеньев исходной системы, охваченных обратной связью, практически исключается. Отсюда следует, что охватывать обратной связью рекомендуется те звенья, которые существенно ухудшают переходный процесс.
Переходя к логарифмическим характеристикам, последнее выражение можно записать так: Кисх(j)-Lск()=Lо.с()+Lохв() Порядок выполнения расчета при синтезе системы с коррекцией с помощью дополнительных обратных связей сводится к следующему. 1. Строят ЛАЧХ исходной системы Lисх() 2. По техническим требованиям, предъявляемым к проектируемой системе и переходному процессу в ней, строят ЛАЧХ скорректированной системы Lск(). 3. По известными ЛАЧХ строят соответствующие им ЛФЧХ. 4. Вычитанием ЛАЧХ скорректированной системы из ЛАЧХ исходной системы получают ЛАЧХ корректирующего устройства и звеньев, охваченных этим корректирующим устройством, т. е. находят Lо.с()+Lохв(). 5. Руководствуясь конкретной схемой корректируемой системы, намечают место включения корректирующего устройства, после чего определяют Lохв(). 6. Вычитая из суммарной ЛАЧХ, соответствующей двум характеристикам Lo.с() и Lохв(), ЛАЧХ, соответствующую характеристике охваченных звеньев Lохв(), определяют ЛАЧХ корректирующего устройства, т. е. [Lo.с()+Lохв()]-Loxв()=Lо.с(). 7. По найденной ЛАЧХ корректирующего устройства находят наиболее простое его техническое исполнение.
Р
Рис.
2.27. Синтез системы с коррекцией с помощью
дополнительных обратных
связей