

9.10.2 Включение корректирующих звеньев
Корректирующие звенья (КЗ) могут включаться последовательно (рис. 9.23, а) или параллельно (рис. 9.23, б, в) с основными звеньями САУ.
Соответственно, они делятся на последовательные и параллельные КЗ и вводятся в САУ для изменения её динамических и статических свойств. Для линейных САУ все виды соединений корректирующих звеньев эквивалентны, т. е. каждое из них дает полностью подобные в динамическом отношении САУ.
Э квивалентность
корректирующих звеньев вытекает из
условий равенства их передаточных
функций Wk1(s)=Wk2(s)=Wk3(s).
Это позволило получить шесть формул
перехода от корректирующих звеньев
одного типа к звеньям другого типа (для
упрощения записи знак (s)
в этих формулах обычно не приводят).
квивалентность
корректирующих звеньев вытекает из
условий равенства их передаточных
функций Wk1(s)=Wk2(s)=Wk3(s).
Это позволило получить шесть формул
перехода от корректирующих звеньев
одного типа к звеньям другого типа (для
упрощения записи знак (s)
в этих формулах обычно не приводят).
![]() ;
;
![]() ;
;
![]()
где Wo – передаточная функция основных элементов САУ или объекта управления.
Линейные корректирующие звенья и устройства (пассивные и активные) разделяют на пять групп: с запаздыванием по фазе и изменением логарифмической амплитудной характеристики (ЛАХ) на -20 дБ/дек; с запаздыванием по фазе и изменением ЛАХ на -40 дБ/дек; с опережением по фазе и изменением ЛАХ на +20 дБ/дек; с опережением или запаздыванием по фазе и изменением ЛАХ на ±20 дБ/дек или ±40 дБ/дек (корректирующие звенья комбинированного типа). Здесь децибел – единица измерения отношения амплитуд А2 и А1 двух сигналов при использовании логарифмической зависимости. Эту зависимость используют, когда величина отношения весьма значительна и достигает нескольких миллионов. По определению отношение двух сигналов, выраженное в децибелах, это дБ=20·lg(A2/A1). Например, если один сигнал имеет амплитуду вдвое большую, чем другой, то отношение первого ко второму составляет +6 дБ, т.к. lg2=0,301. Если же один сигнал в 10 раз больше другого, то отношение первого ко второму составляет +20 дБ, а если один сигнал в 10 раз меньше другого, то -20 дБ. Это записывается как 20 дБ/дек. Декада – длина отрезка по оси абсцисс (частот) соответствующая десятикратному изменению частоты. Например, частотный диапазон от 1 до 104 с-1 содержит 4 декады, т.к. lg104=4. Первая декада от 1 до 10 с-1, вторая – 10–100 с-1, третья – 100–1000 с-1, четвертая – 1000–10000 с-1.
Наиболее распространенные звенья: пропорционально- дифференцирующие (ПД), пропорционально-интегрирующие (ПИ), пропорционально-интегро-диференцирующие (ПИД). Кроме того, применяются пропорциональные (П), интегральные (И) и дифференциальные (Д). Они применяются и в соответствующих электронных регуляторах, схемы и характер которых представлены в приложении П. 4.
9.10.3 Корректирующие звенья последовательного типа (или последовательная коррекция)
Эти звенья применяют обычно в САУ с электрическим сигналом в виде напряжения U постоянного тока, которое функционально связано с ошибкой управления ε, т.е. U=f(ε). Они реализуются на пассивных или активных RLC - элементах (чаще на элементах RC). В случае напряжения переменного тока их применять очень сложно. Возможно выполнение корректирующих звеньев и из неэлектрических элементов, например, механических, гидравлических и т.п. Это связано с тем, что КЗ часто являются типовыми динамическими звеньями. Их схемы, передаточные функции и логарифмические амплитудные частотные характеристики (ЛАЧХ) приведены в учебниках и справочниках.
Корректирующие звенья разделяют на активные и пассивные. Активное звено в отличие от пассивного содержит в своем составе и усилительный элемент.
Пассивные корректирующие звенья могут
быть представлены в виде обобщенной
схемы (рис. 9.24, а). Передаточная функция
такого звена:
![]() ,
где z1(s),
z2(s)
– сопротивления в операторной форме.
,
где z1(s),
z2(s)
– сопротивления в операторной форме.
Обобщенная схема активных звеньев
представлена на рис. 9.24, б, а передаточная
функция
![]()
 Последовательное включение в САУ
дифференцирующих элементов (опережающих
по фазе) ускоряет протекание переходного
процесса, а включение интегрирующего
элемента (отстающего по фазе) – снижает
установившуюся ошибку ε.
Последовательное включение в САУ
дифференцирующих элементов (опережающих
по фазе) ускоряет протекание переходного
процесса, а включение интегрирующего
элемента (отстающего по фазе) – снижает
установившуюся ошибку ε.
Преимущества последовательной коррекции: 1) относительная простота включения элементов коррекции; 2) расширение полосы пропускания частот при включении дифференцирующего элемента в цепь регулирования.
Расчет структуры САУ обычно осуществляют графоаналитическим методом, переходя от передаточных функций к комплексным коэффициентам усиления, а затем к логарифмическим характеристикам. Порядок вычисления следующий:
1. Строят ЛАЧХ исходной системы.
2. По заданным требованиям к качеству переходного процесса в проектируемой системе строят ЛАЧХ скорректированной системы.
3. По имеющимся ЛАЧХ строят соответствующие логарифмические фазочастотные характеристики (ЛФЧХ) и определяют имеющийся запас по фазе и модулю.
4. Вычитанием ЛАЧХ исходной системы из ЛАЧХ скорректированной системы получают ЛАЧХ корректирующего устройства Lk(w).
5. По полученной ЛАЧХ корректирующего устройства подбирают наиболее простое по техническому исполнению и его параметры.
Пример, иллюстрирующий методику синтеза при последовательном включении корректирующего устройства, приведен на рис. 9.25.
И
Рис.
9.25. Синтез системы с последовательной
коррекцией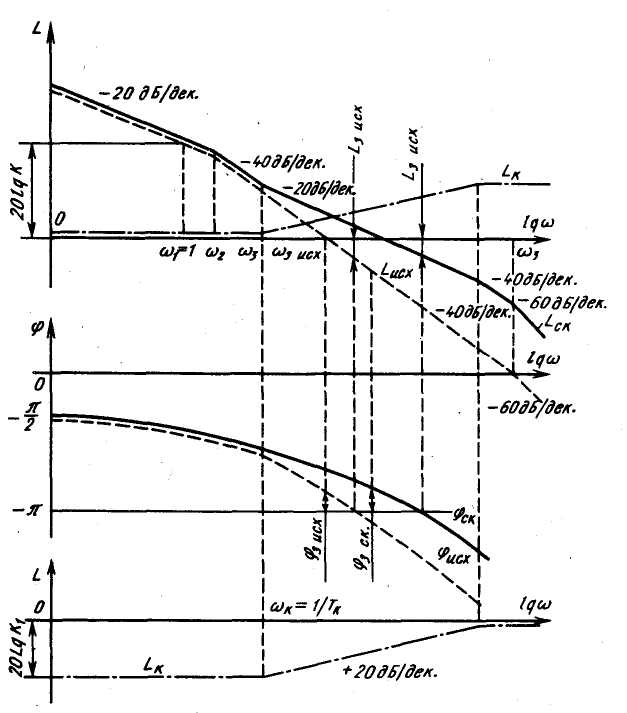
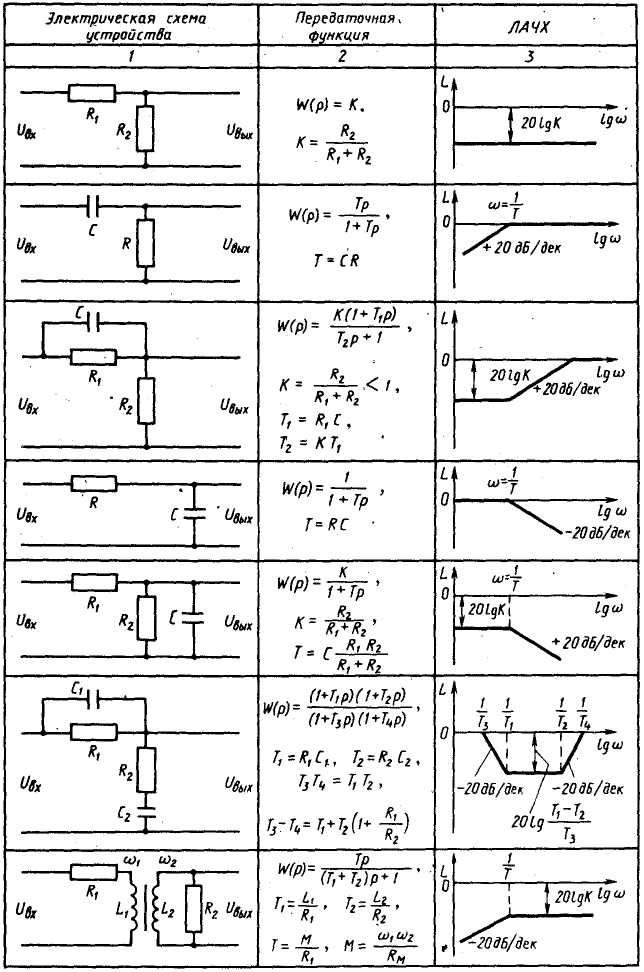
Таблица 9.2. Электрические схемы, передаточные логарифмические амплитудно-частотные характеристики типовых корректирующих устройств
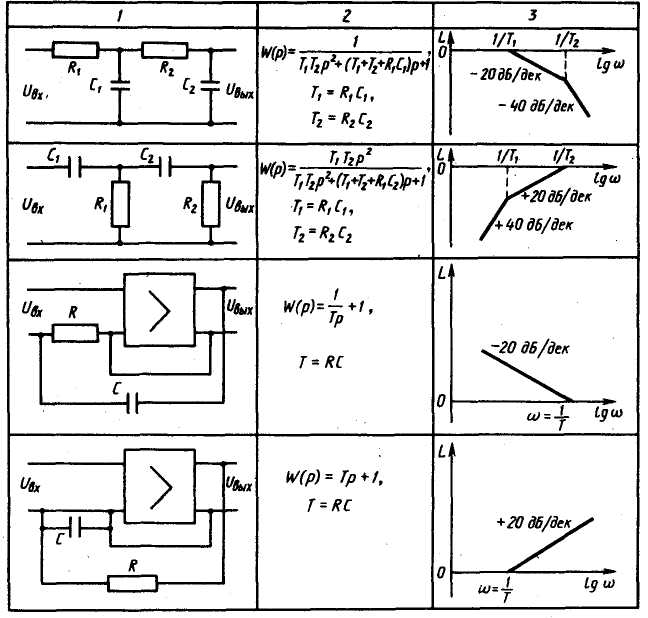
Продолжение таблицы 9.2
Вычитание ЛАЧХ исходной системы из ЛАЧХ скорректированной системы дает ЛАЧХ корректирующего устройства Lк(). В качестве корректирующего устройства для электрической системы выбираем пассивный четырехполюсник (см. табл. 9.2) как элемент, имеющий наиболее простое исполнение. Параметры такого дифференцирующего устройства находят при рассмотрении его ЛАЧХ и передаточной функции Wк(S)=K1(1+рТ1)/(1+рТ2), где Т1=R1C; K1=R2/(R1+R2); T2=K1T1. В свою очередь,Tк=1/к=R1C=T1; 20lgK1=20lgR2/(R1+R2). Из полученных уравнений находят параметры корректирующего элемента.