

9.5. Частотные характеристики динамических звеньев
Е сли
входной сигнал САУ изменяется по
гармоническому закону заданной амплитуды
и частоты, то нахождение параметров
колебаний на выходе САУ легче осуществлять
с помощью частотных характеристик.
Пусть гармонический входной сигнал с
амплитудой
сли
входной сигнал САУ изменяется по
гармоническому закону заданной амплитуды
и частоты, то нахождение параметров
колебаний на выходе САУ легче осуществлять
с помощью частотных характеристик.
Пусть гармонический входной сигнал с
амплитудой
![]() и фазой
и фазой
![]() проходит через устойчивое звено. На
выходе звена сигнал смещается по фазе
и имеет другую амплитуду (рис. 9.11).
Искажённый вид начального участка
выходного сигнала объясняется влиянием
переходного процесса
проходит через устойчивое звено. На
выходе звена сигнал смещается по фазе
и имеет другую амплитуду (рис. 9.11).
Искажённый вид начального участка
выходного сигнала объясняется влиянием
переходного процесса
Если в передаточной функции
заменить
![]() на
на![]()
![]() ,
то частотную передаточную функцию звена
можно представить в следующем виде:
,
то частотную передаточную функцию звена
можно представить в следующем виде:
![]() ,
,
где
![]() ;
;
![]() .
.
Кроме того,
![]() ,
где
,
где
![]() ;
;
![]() .
.
Функция
![]() называется амплитудной частотной
характеристикой (а.ч.х.).
называется амплитудной частотной
характеристикой (а.ч.х.).
Функция
![]() называется фазовой частотной
характеристикой (ф.ч.х.) звена.
называется фазовой частотной
характеристикой (ф.ч.х.) звена.
Функция
![]() называется вещественной частотной
характеристикой звена.
называется вещественной частотной
характеристикой звена.
Функция
![]() – мнимая частотная характеристика
звена.
– мнимая частотная характеристика
звена.
Для каждого фиксированного значения
![]() частотная передаточная функция на
плоскости
частотная передаточная функция на
плоскости
![]() может быть изображена вектором
может быть изображена вектором
![]() ,
отклонённым от положительного направления
оси абсцисс на угол
,
отклонённым от положительного направления
оси абсцисс на угол
![]() .
Годограф этого вектора при изменении
частоты от
.
Годограф этого вектора при изменении
частоты от
![]() до
до![]() называется амплитудно-фазовой частотной
характеристикой звена (рис. 9.12).
называется амплитудно-фазовой частотной
характеристикой звена (рис. 9.12).
![]() – действительная часть комплексного
числа
– действительная часть комплексного
числа
![]() ,
(
,
(![]() – действительный (франц.))
– действительный (франц.))
![]() – мнимая часть комплексного числа
,
(
– мнимая часть комплексного числа
,
(![]() – мнимый (франц.))
– мнимый (франц.))
![]()
 – аргумент комплексного числа
,
(это угол
– аргумент комплексного числа
,
(это угол
![]() ,
измеренный в радианах) – применяется
при тригонометрической форме записи
комплексного числа.
,
измеренный в радианах) – применяется
при тригонометрической форме записи
комплексного числа.
9.6. Логарифмические частотные характеристики линейных звеньев
Частотные характеристики, построенные
в логарифмических шкалах, называются
логарифмическими частотными
характеристиками. При построении
логарифмических характеристик на шкале
частот, например, вместо
![]() откладывают
откладывают
![]() .
Это существенно упрощает исследование
линейных САУ.
.
Это существенно упрощает исследование
линейных САУ.
9.7. Типовые динамические звенья и их характеристики
Типовыми динамическими звеньями называются звенья, описываемые дифференциальным уравнением не выше второго порядка (в переменных вход и выход). Эти звенья классифицируют в зависимости от вида левой и правой частей их дифференциального уравнения. Все типовые звенья разделяют на три группы: позиционные, интегрирующие и дифференцирующие. Каждая из групп содержит несколько типовых звеньев (табл. 9.1). К сожалению названия звеньев и их количество пока не одинаковы у разных авторов .
Т
Передаточная функция W(s)
№ п.п. |
Груп-па |
Тип звена |
Вид дифференциального Уравнения
|
|
1 |
Пози-цион-ные |
Безинерционное (пропорциональное) |
y = ku |
k |
2 |
Апериодическое 1-го порядка (инерционное) |
(Tp + 1) y = ku |
|
|
3 |
Апериодические 2-го порядка |
(
|
|
|
4 |
Колебательное |
(
|
|
|
5 |
Консервативное |
(T2p2 + 1)y + ky |
|
|
6 |
Ин- тегри- рую- щие |
Идеальное интегрирующее |
|
|
7 |
Интегрирующее с замедлением |
|
|
|
8 |
Изодромное |
py = (k+k1p)u |
|
|
9 |
Диф- ферен- цирую- щие |
Идеальное дифференцирующее |
y = kpu |
|
10 |
Дифференцирующее с замедлением |
(Tp+1)y = kpu |
|
Примечание:
– постоянная времени, [с];![]() – коэффициент передачи звена;
– коэффициент передачи звена;![]() – коэффициент относительного
демпфирования;
– коэффициент относительного
демпфирования;![]() – символ дифференцирования, равнозначный
записи
– символ дифференцирования, равнозначный
записи
![]() или
или![]() ;
;
![]() – передаточный коэффициент.
– передаточный коэффициент.
Пример. Безынерционное (пропорциональное) звено
1. Дифференциальное
уравнение:
![]() .
.
2. Конструктивное исполнение:
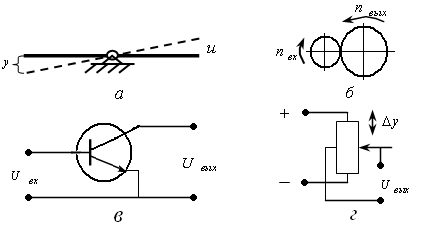
Рис. 9.13. - Примеры конструктивных исполнений:
а
– рычаг; б – механический редуктор; в
– транзистор; г – потенциометрический
датчик, преобразующий механическое
перемещение ползунка![]() в электрическую величину
в электрическую величину
![]() ,
пропорциональную этому перемещению,
т.е.
,
пропорциональную этому перемещению,
т.е.
![]()
3. Временные характеристики:

4






 .
Частотные характеристики:
.
Частотные характеристики:
5. Логарифмические частотные характеристики:

Рис. 9.16. Логарифмические
частотные характеристики
Примеры и характеристики остальных динамических звеньев приведены в приложении П. 1, а также в справочниках и учебниках.