

7. Сводная классификация систем регулирования и управления
Все системы автоматического управления и регулирования можно классифицировать следующим образом (рис. 7.1).
8. Режимы и характеристики работы сар и сау
Как всякие динамические системы, САР и САУ могут работать в двух основных режимах: установившемся и неустановившемся.
8.1. Установившийся режим
Работа объекта регулирования характеризуется совокупностью многих параметров (координат), отражающих те или иные его свойства, например: мощность генератора, его крутящий момент, частота вращения ротора, к.п.д., положение органа управления и т.п.
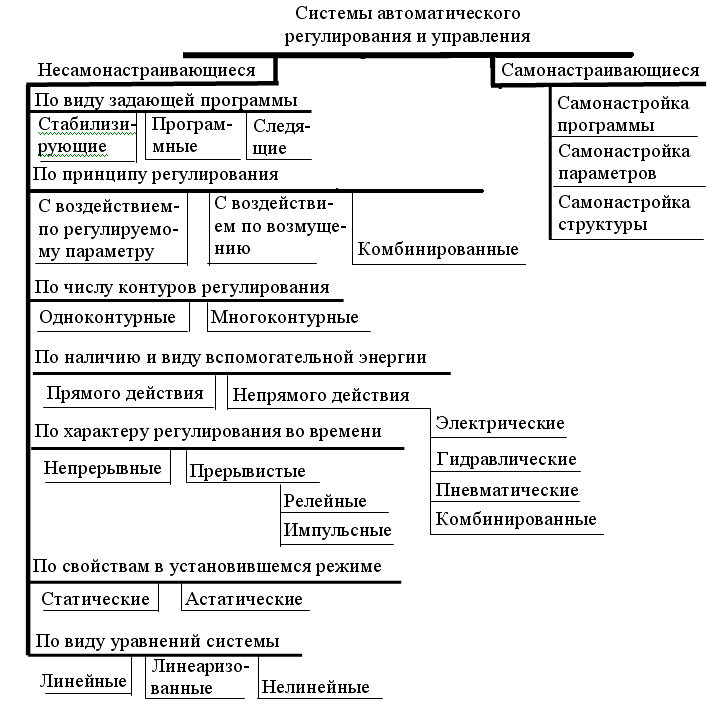
Рис. 7.1. Сводная классификация систем регулирования и управления
Режим работы объекта регулирования называется установившимся, если числовые значения всех координат сохраняются постоянными
во времени. Такая работа объекта в установившемся режиме возможна лишь при выполнении ряда условий. Эти условия могут быть выражены уравнениями статического равновесия.
Н апример:
1. Ротор турбины может сохранять
постоянство частоты вращения только
при условии равенства крутящего момента
турбины
апример:
1. Ротор турбины может сохранять
постоянство частоты вращения только
при условии равенства крутящего момента
турбины
![]() и момента сопротивления
и момента сопротивления
![]() потребителя:
потребителя:![]() .
.
2. Уровень
жидкости в резервуаре останется
постоянным во времени лишь при условии
равенства поступления
жидкости и расхода
её
из резервуара, т.е.
![]() .
.
3. Температура
![]() в
холодильной камере останется постоянной
во времени при выполнении условия
в
холодильной камере останется постоянной
во времени при выполнении условия
![]() ,
где
,
где
![]() и
и
![]() соответственно количество теплоты,
поступающей в камеру через её стенки и
от охлаждаемого продукта, и отбираемой
от камеры системой охлаждения, Дж/ч.
соответственно количество теплоты,
поступающей в камеру через её стенки и
от охлаждаемого продукта, и отбираемой
от камеры системой охлаждения, Дж/ч.
8.2. Фактор устойчивости
Рассмотрим статические характеристики
холодильной камеры, определяющие
зависимость количества поступающей
и отбираемой теплоты
от температуры
в камере (рис. 8.1). График показывает, что
условие
выполняется только в точке
![]() .
Поэтому в камере будет поддерживаться
установившийся тепловой режим при
температуре
.
Поэтому в камере будет поддерживаться
установившийся тепловой режим при
температуре
![]() .
Однако режим работы камеры с течением
времени может изменяться, например, при
загрузке в камеру новой порции продукта
или выгрузке (или по другим причинам).
.
Однако режим работы камеры с течением
времени может изменяться, например, при
загрузке в камеру новой порции продукта
или выгрузке (или по другим причинам).
Нарушение установившегося режима
вызовет отклонение температуры
в камере от её значения
на
![]() .
Пусть это отклонение будет в сторону
увеличения
(загрузка камеры). Тогда
.
Пусть это отклонение будет в сторону
увеличения
(загрузка камеры). Тогда
![]() ,
а
>
.
В связи с этим температура в камере
будет уменьшаться, и установившийся
режим при
,
а
>
.
В связи с этим температура в камере
будет уменьшаться, и установившийся
режим при
![]() восстановится. При уменьшении температуры
на
,
наоборот,
>
,
и установившийся режим при
также восстановится. Такой установившийся
режим называется устойчивым.
восстановится. При уменьшении температуры
на
,
наоборот,
>
,
и установившийся режим при
также восстановится. Такой установившийся
режим называется устойчивым.
Устойчивость режима зависит от дисбаланса
тепловых потоков при данном отклонении
температур от
.
Поэтому оценкой устойчивости может
служить отношение
![]() ,
называемое фактором устойчивости (в
данном случае холодильной камеры).
,
называемое фактором устойчивости (в
данном случае холодильной камеры).
Аналогично может быть определена
устойчивость режимов и других объектов.
Например, устойчивость регулирования
уровня жидкости в резервуаре определяется
как
![]() .
.
Т ак
как в общем случае тепловые потоки
и
(и подобные величины) могут зависеть не
только от температуры внутри камеры,
но и других величин, то для более точного
определения фактора устойчивости
пользуются частными производными. Тогда
ак
как в общем случае тепловые потоки
и
(и подобные величины) могут зависеть не
только от температуры внутри камеры,
но и других величин, то для более точного
определения фактора устойчивости
пользуются частными производными. Тогда
![]() .
.
Устойчивость установившегося режима
характеризуется алгебраическим знаком
![]() и его числовым значением. Если
и его числовым значением. Если
![]()
![]()
![]() ,
то
,
то
![]() и режим устойчив, причём тем более
устойчив, чем больше значение
.
При
и режим устойчив, причём тем более
устойчив, чем больше значение
.
При
![]() режим работы неустойчив. В этом случае
рассматриваемый объект имеет отрицательное
самовыравнивание.
режим работы неустойчив. В этом случае
рассматриваемый объект имеет отрицательное
самовыравнивание.