

5. Стабилизирующие, программные, следящие и
самонастраивающиеся регуляторы
5.1. Стабилизирующий регулятор
поддерживает регулируемый параметр
в заданных пределах постоянным при
возникновении всех видов возмущений,
помех или нарушений рабочих режимов:![]() .
.
Примеры. Уже рассмотренные ранее поплавковый регулятор постоянства уровня воды в ёмкости и регуляторы постоянства напряжения на зажимах генератора.
5.2. Программный регулятор изменяет
параметр регулирования
в соответствии с заданным значением,
меняющимся во времени
по установленному ранее закону:
![]() .
Задание программы осуществляется
программоносителями: в виде механических
копиров, кулачков, перфокарт, магнитных
лент и дисков и т.п.
.
Задание программы осуществляется
программоносителями: в виде механических
копиров, кулачков, перфокарт, магнитных
лент и дисков и т.п.
Пример. Регулятор изменения температуры термической печи по заданному закону (рис. 5.1)
Рис.5.1.
Программный регулятор
температуры
в печи
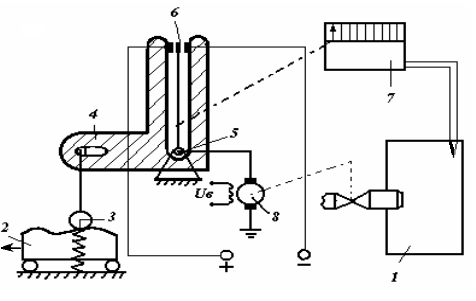
Регулятор непрерывно производит сравнение фактической температуры печи с температурой, которая должна быть достигнута в данный момент времени согласно заданию программного устройства. В случае их несоответствия регулятор приводит фактически имеющуюся температуру в соответствие с заданной программным устройством. Требуемое изменение температуры печи 1 во времени задаётся при помощи профильной диаграммы 2, которая перемещается с помощью часового механизма (не показан). Заданное изменение температуры посредством катящегося по профильной диаграмме ролика 3 и тяги передаётся рычагу 4 Г-образной формы, который поворачивается вокруг оси 5. В вертикальной прорези рычага 4 помещена стрелка 6, указывающая фактическую температуру печи. Эта стрелка связана механически или электрически с первичным измерительным прибором 7. В случае несоответствия заданной температуры и фактической стрелка 6 будет касаться одного из контактов рычага 4 и тем самым включать и заставлять вращаться исполнительный двигатель 8 в нужном направлении. Двигатель 8 изменяет подачу топлива к печи, а следовательно, и температуру. Когда требуемая по программе и фактическая температуры будут соответствовать друг другу, стрелка 6 не будет касаться контактов рычага 4 и двигатель 8 будет неподвижен.
5.3.
Следящий регулятор или следящая система
поддерживают параметр
регулирования в соответствии с таким
его значением, которое изменяется по
заранее не известному закону и является
величиной, не зависящей от регулятора:
![]() ,
где
,
где
![]() – независимая переменная.
– независимая переменная.
П
3
 ример.
Следящий регулятор управления положением
антенны радиолокатора (башни танка,
руля самолёта или корабля) (рис. 5.2).
ример.
Следящий регулятор управления положением
антенны радиолокатора (башни танка,
руля самолёта или корабля) (рис. 5.2).
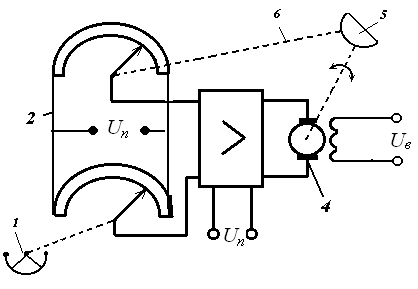
Рис. 5.2. Следящий регулятор управления антенной
В этом регуляторе поворот управляющего штурвала 1 вызывает разбаланс электрического моста 2. Сигнал, поступающий с моста, усиливается в усилителе 3, от которого питается электродвигатель 4. Двигатель 4 перемещает объект регулирования 5 (антенну радиолокатора) в заданное штурвалом 1 положение. Механическая связь 6 перемещает при этом верхний движок потенциометра так, что разбаланс моста сводится к нулю, и система приходит в новое состояние равновесия.