

Лекція №6 промислові контролери
5.1. Основні характеристики промислових контролерів
В архітектурі АСУ ТП контролери займають місце між рівнем датчиків, виконавчих механізмів і системами верхнього рівня керування процесом. Основна функція контролерів у системі - збір, обробка й передача на верхній рівень первинної інформації, а також вироблення керуючих впливів, згідно із запрограмованими алгоритмами керування й передача цих впливів на виконавчі механізми.
Більшість сучасних контролерів виготовляється по секційно-блоковому принципу. Кожний логічний модуль фізично являє собою окремий блок, що встановлюється в монтажний кошик або на єдину монтажну шину. Комутація між модулями здійснюється через єдиний монтажний крос.
Такий конструктив дозволяв широко варіювати кількість використовуваних модулів і оптимально підлаштовувати фізичну архітектуру контролера до розв'язуваного завдання. Крім того, така побудова зручна в обслуговуванні, модернізації й ремонті. При необхідності замінюються лише окремі модулі без зміни архітектури всієї системи.
Основними функціональними елементами контролерів є:
корпус;
джерело живлення;
процесорний модуль;
модулі введення-виведення;
модулі зв'язку й інтерфейсів;
спеціалізовані модулі.
Джерело живлення повинно забезпечувати безперервність і надійність роботи всіх вузлів контролера. Особлива увага приділяється наявності резервного джерела живлення (як правило, акумуляторна батарея), що дозволяє зберігати інформацію при відключенні зовнішнього електроживлення.
Модуль процесора залежно від використовуваної елементної бази може бути 8-, 16- і 32- розрядним. Обсяг оперативної пам'яті істотно відрізняється в різних моделях контролерів: від десятків кілобайт до десятків мегабайт. За логічною структурою модуль процесора контролера аналогічний системному блоку персонального комп'ютера, де замість дискових накопичувачів у контролерах використовуються програмовані постійно-запам'ятовуючі пристрої (ППЗП) і flash-пам'ять. У деяких моделях контролерів flash-пам'ять відсутня, в інших - може досягати
77
десятків, а іноді й сотень мегабайт. У модулі процесора вбудований також годинник реального часу (RTC).
Модулі введення-виведення призначені для перетворення вхідних аналогових і дискретних сигналів у цифрову форму й видачі керуючого впливу у вигляді аналогового або дискретного сигналу. Модулі аналогового введення розраховані на введення уніфікованих сигналів струму (0...5 мА, 0(4) ... 20 мА) і напруги (0...10 В, ± 10 В). Є спеціалізовані модулі аналогового введення, розраховані на безпосереднє підключення різних датчиків (наприклад, термопар, термоопорів). Модулі аналогового виведення перетворюють цифровий сигнал в уніфікований сигнал струму або напруги. Модулі дискретного введення-виведення найчастіше працюють із низькорівневими дискретними сигналами (24 В постійного струму). Деякі моделі контролерів мають у своєму розпорядженні модулі дискретного введення високорівневих сигналів постійного або змінного струму (до 250 В) і модулі дискретного виведення, організовані з використанням тиристорів (до 250 В, 300 ... 500 мА) і дуже точними реле (250 В, 2 А).
Модулі зв'язку й інтерфейсів забезпечують зв'язок контролерів з верхнім рівнем, а також між собою. У практиці побудови АСУ ТП використовуються різні інтерфейси й протоколи передачі даних за допомогою мережі: послідовні інтерфейси (RS-232, 422, 485), мережеві протоколи (Ethernet, Profibus, CAN, Modbus і ін).
Всі сучасні програмовані логічні контролери (ПЛК) мають розвинені програмні засоби. Незважаючи на існування міжнародного стандарту на мови програмування програмованих логічних контролерів ІЕС 61131-3 багато виробників обладнують свої контролери технологічними мовами власного виробництва. Технологічні мови програмування дозволяють здійснювати опитування входів і ініціалізацію виходів, обробляти арифметичні й логічні інструкції, управляти таймерами-лічильниками, здійснювати зв'язок з іншими ПЛК і комп'ютером.
Введення програми в пам'ять контролера здійснюється за допомогою спеціальних програматорів або через інтерфейс комп'ютера. Майже кожний виробник разом з контролерами поставляє пакет програм для створення й налагодження контролерного ПЗ на комп'ютері. Поставляються також різні симулятори й спеціалізовані редактори, у тому числі графічні. Після налагодження програм контролери можуть зберігати їх в енергонезалежних ПЗП, з яких програма перевантажується в ОЗП після включення живлення або ініціалізації контролера.
78
5.2. PC-сумісні контролери
До останнього часу роль контролерів в АСУ ТП в основному виконували програмовані логічні контролери - ПЛК (PLC -Programmable Logic Controller) іноземного й вітчизняного виробництв. Найбільш популярні в нашій країні ПЛК таких закордонних виробників, як Allen-Braidly, Siemens, ABB, Modicon, і такі вітчизняні моделі, як "Ломіконт", "Реміконт", "Мікродат", "Емікон". У зв'язку з бурхливим зростанням виробництва мініатюрних PC-сумісних комп'ютерів останні все частіше стали використовуватись як контролери, причому ця тенденція прямо пов'язана з концепцією ОМАС (Open Modular Architecture Controls) - відкритої модульної архітектури контролерів.
Такі PC-сумісні контролери одержали назву SoftPLC. Ця назва свідчить про те, що більшість функцій звичайних PLC, які вирішувались на апаратному рівні, у цих контролерах вирішується за допомогою програмного забезпечення.
Перша й головна перевага PC-контролерів пов'язана з їх відкритістю, тобто з можливістю застосовувати в АСУ ТП найсучасніше устаткування, що тільки з'явилося на світовому ринку, причому устаткування для PC-контролерів зараз випускають уже не десятки, а сотні виробників, що робить вибір досить широким. Це дуже важливо, якщо врахувати, що модернізація АСУ ТП іде поетапно й забирає тривалий час, іноді кілька років. Користувач АСУ ТП уже не перебуває під владою одного виробника (як у випадку з звичайними PLC), що нав'язує йому свою волю й змушує застосовувати тільки його технічні рішення, а сам може зробити вибір, застосовуючи ті підходи, які в цей момент його найбільше влаштовують. Він може тепер застосовувати у своїх системах продукцію різних фірм, стежачи тільки, щоб вона відповідала певним міжнародним або регіональним стандартам. Друга важлива перевага PC-контролерів полягає в тому, що в силу їх "спорідненості" з комп'ютерами верхнього рівня не потрібні додаткові витрати на підготовку професіоналів, що забезпечують їх експлуатацію. Цю роботу можуть із успіхом виконувати (і це підтверджується на практиці) фахівці, що забезпечують експлуатацію комп'ютерів верхнього рівня. Це дозволяє скоротити терміни впровадження систем керування й спрощує процедури їхньої експлуатації, що в остаточному підсумку приводить до загального зниження витрат на створення або модернізацію АСУ ТП.
Контролер на базі персонального комп'ютера - РС-сумісний контролер, крім виконання функцій, характерних для PLC, має більші можливості. Так, наприклад, на нього можна покласти
79
функції роботи з мережами, інтерфейсу людина-машина, підтримку різних баз даних і більш дружнього інтерфейсу користувача.
PC-сумісні контролери умовно можна розділити на локальні й розподілені (модулі введення-виведення розташовуються поза корпусом контролера).
PC-сумісні контролери складаються з процесорної плати з вбудованими функціями роботи з диском, клавіатури, монітора, блока живлення під різні вхідні напруги, плат збору даних, що забезпечують ввід-вивід аналогових і цифрових сигналів. По суті, це звичайний комп'ютер у компактному виконанні, що забезпечує всі функції персонального комп'ютера з додаванням специфічних можливостей, які характерні для промислового контролера. Серед них:
• наявність вартового таймера для перезапуску системи при збої, із програмованим інтервалом перезапуску;
• можливість роботи із флеш-пам'яттю (у цей час спостерігається тенденція до зниження вартості Flash-дисків);
розширені функції роботи із шиною ISA для збільшення навантажувальної здатності шини, що дозволяє встановлювати в контролері до 20 плат розширення (їхня кількість обмежена адресним простором комп'ютера);
висока інтеграція елементів і, відповідно, малий розмір плат (наприклад, плата Wafer фірми ІСР розміром з 3,5-дюймовий флопі-диск має всі необхідні функції для роботи з диском, монітором і мережею);
наявність додаткової пам'яті розміром в 1 Кбіт для зберігання критичних даних, що дозволяє виключити несанкціоновану заміну програмного забезпечення або самої процесорної плати;
додаткова шина РС/104 для різних плат розширення з низьким енергоспоживанням;
• можливість роботи тільки від однієї напруги, деякі плати можуть працювати тільки від напруги +5 В. В основному це плати із процесором Intel.
Відповідно до вимог завдання можна вибирати й тип шини, на якій буде побудований контролер. Це шини ISA (16-розрядна, 8 МГц), PC/104 (8- і 16-розрядна), РСІ (32-розрядна) або CompactPCI. Останнім часом інтенсивно розширюється область використання PC-контролерів, побудованих на основі шини VME. Кожний з цих варіантів забезпечений відповідним набором плат збору даних.
Шина ISA широко застосовується в рішенні задач автоматизації, оскільки є надійною в застосуванні й простою у використанні. Є широкий вибір плат збору даних. Система, побудована на цій шині, у більшості випадків задовольняє вимогам задач, розв'язуваним у промисловості, оскільки такі завдання не
80
вимагають великих швидкостей обробки даних. У контролерах цієї серії застосовуються процесори від Intel 386 до Intel Pentium.
Шина EISA, PCI. При рішенні завдань, пов'язаних з обробкою високочастотних сигналів, як у лабораторних, так і в промислових умовах краще зупинити свій вибір на платах збору даних у стандарті РСІ. Сучасні пасивні шини із установленими активними мостами РСІ-РСІ дозволяють встановлювати до 17 РСІ-плат розширення в комп'ютер. У сукупності із процесорними платами на базі Pentium, Pentium ІІ/ПІ такий контролер зможе вводити й обробляти сигнали частотою більше 100 КГц, наприклад, робити аналіз спектра високочастотних сигналів у реальному часі. Така платформа найбільше підходить для створення промислових серверів різного рівня й наукових комп'ютерних стендів. Завдяки вдалому технічному рішенню, у цей час одержала поширення гібридна шина ISA і РСІ - PCISA. Вона дозволяє використовувати в половинному розмірі материнські плати з високопродуктивними процесорами. Таким чином, можна без проблем модернізувати вже існуючі системи із шиною ISA, одержуючи можливість використати конструктивні новітні процесорні й периферійні плати із шинами ISA і РСІ.
Шина РС/І04 є аналогом 16-бітної шини ISA. Плати в цьому стандарті мають мале споживання й, відповідно, низьку навантажувальну здатність по шині, тому їхня кількість у контролері обмежена до 4 - 5 плат. Надійний штировий роз'єм дозволяє з'єднувати плату з етажеркою й кріпити її по кутах, що робить конструкцію контролера твердою й надійною. Такий контролер не вимагає додаткового охолодження. Хоча в цьому стандарті існують і плати з більш високопродуктивними процесорами, найбільше поширення одержали плати на процесорах 386 і 486. Шину РС/104 використовують при необхідності установки контролера на малий об'єм, що не дозволяє застосовувати активну вентиляцію плат, наприклад, коли необхідно вмонтувати комп'ютерну систему усередину різної апаратури.
Якщо необхідні високі швидкості обробки даних у важких виробничих умовах, краще застосовувати контролери на шині CompactPCI (це аналог шини РСІ). Такий контролер можна встановити в промислову 19-дюймову стійку, причому конструкція корпуса дозволяє мати доступ до керуючих плат як з передньої, так і з задньої панелі комп'ютера, що значно полегшує обслуговування і прискорює заміну плат. Сама шина на відміну від ножової РСІ-шини, виконана в більш надійному штировому виконанні. Твердіше кріплення плат у корпусі, гарна вентиляція, а також виконання корпуса в настільному, настінному або стоячому варіантах
81
дозволяють використати їх у завданнях виміру й тестування, промислової автоматики, телекомунікації й комп'ютерній телефонії.
Останнім часом часто використається розподілена архітектура контролерного рівня АСУ ТП. У більших, просторово рознесених установках зростають витрати на кабельні з'єднання й чутливість до перешкод. Тому контролери, що володіють невеликою кількістю входів-виходів, розташовують у безпосередній близькості від конкретних датчиків і виконавчих механізмів, при цьому кожний контролер управляє своєю ділянкою процесу. Контролери зв'язуються між собою й координуючим майстром-контролером або комп'ютером, промисловою мережею. При реалізації розподілених АСУ ТП широко використовуються також інтелектуальні модулі введення-виведення, які встановлюються в безпосередній близькості до датчиків і виконавчих механізмів. Зв'язок віддалених модулів з керуючим контролером також здійснюється за допомогою промислової мережі.
Гнучкість логічної й фізичної архітектури керуючих контролерів дозволяє організувати гнучку схему керування процесом. Керуючі контролери можуть нести основне навантаження по керуванню процесом, видаючи на верхній рівень тільки "довідкову" інформацію, а можуть бути лише передаючою ланкою між комп'ютером і конкретними елементами керування технологічним процесом. Сучасні керуючі контролери здатні взяти на себе керування як завгодно великим процесом, з будь-якою необхідною швидкістю й точністю.
Промислові контролери класифікуются:
універсальні (магістрально-модульні);
спеціалізовані (контролери мереж).
Сучасні промислові контролери створюються на платформах від Motorola, Intel (IBM PC), DSP... із приладовою магістраллю -VME, VXI, PCI, PXI..., які працюють під керуванням операційних систем VxWorks, DOS, Windows... з підтримкою прикладних систем - NI-VXI/VISA, NI-488, VEE...i можуть мати вбудовані системні пристрої введення-виведення.
Серед засобів проектування можна відзначити IsaGraf, Ultralogik, LabVIEW RT...
Функції контролерів:
прийом даних від пристроїв нижніх рівнів;
вимір і попередня обробка - при роботі з неінтелектуальними датчиками;
керування мережами Fieldbus - при роботі з інтелектуальними датчиками;
вторинна обробка даних і реалізація алгоритмів керування;
апаратна підтримка мереж і протоколів Fieldbus;
82
апаратна підтримка мереж верхнього рівня;
дистанційне керування й завантаження програм;
відмовостійкість і самодіагностика.
У цей час виробляється широкий спектр різних промислових контролерів. Деякі з них розглянуті нижче (рис.6.1-
6.6.).
Рисунок 6.1 - Йромясловай контролер 1500 VXI Mainframes
Характеристики промислового контролера 1500 VXI Mainframes:
• слотів під VXI-модулі- 13;
• вбудований блок живлення - 1420 В А;
Plug & Play;
приладове або стояче виконання;
висока ремонтопридатність;
48,3x40,6x74,2 см; 28,2 кг;
діапазон робочих температур від 0°С до 50°С ;
удари - 30g, 11 мс;
вібрації від 5Гц до 500 Гц (від 0,31 g до 2,5g).
83
Рисунок 6.2 - Промисловий контролер Embedded Pentium VXIbus Computer VXIpc-800 Series
Особливості промислових контролерів серії VXIpc-8XX:
повна сумісність із IBM PC;
Plug & Play - контролер VXI або додатковий процесор;
програмне й апаратне керування запуском;
програмне скидання процесора або шини (без рестарту процесора);
бібліотеки для роботи з VXI, ІЕЕЕ-488, C++, VB, LV, LW CVI...
84
Рисунок 6.3 - Промисловий контролер РХІ-1010
Характеристики промислового контролера РХІ-1010:
• РХІ, Compact PCI слотів - 8; SCXI слотів-4;
живлення й конфігурування РХІ і SCXI;
захист від перешкод;
вбудований блок живлення - 300 ВА;
приладове або стояче виконання;
40,4x43,9x17,7 см, 13 кг;
діапазон робочих температур від 0°С до 50°С ;
удари - 30g, 11 мс;
вібрації від 5Гц до 500 Гц (від 0,3lg до 2,5g).
85
Рисунок 6.4 - Промисловий контролер РХІ-8Ї55В Таблиця 6.1 - Характеристика контролерів РХІ-815Х
Тип контролера |
РХI-8155В |
PXI-8156B |
Процесор |
233 MHz Intel Pentium ММХ 333 MHz AMD-K6-2 |
233 MHz Intel Pentium MMX 333MHzAMD-K6-2 |
Периферія |
1 serial port 1 parallel port 1 USB port PS/2 keyboard connector PS/2 mouse connector 4 GB hard drive, minimum 3,5 in. 1,44 MB floppy drive Super VGA with 2 MB DRAM |
2 serial ports 1 parallel port 1 USB port PS/2 keyboard connector PS/2 mouse connector 4 GB hard drive, minimum 3,5 in. 1,44 MB floppy drive Super VGA with 2 MB DRAM 10 BaseT Ethernet GPIB (IEEE 488.2) interface |
Оперативна пам'ять |
Up to 256 MB with upgrades |
Up to 256 MB with upgrades |
Операційна система |
Windows NT or Windows 98 |
Windows NT or Windows 98 |
Програмне забезпечення |
LabVIEW or LabWindows/CVI |
LabVIEW or LabWindows/CVI |
86
Рисунок 6.5 - Промисловий контролер мережі Fieldbus FP-3000
Характеристики промислового контролера FP-3000
протокол Foundation Fieldbus HI - 31,25 Кб/с;
вузлів Field Point - 9;
універсальні функції: АІ (аналогове введення), АО (аналогове виведення), DI (дискретне введення), DO (цифрове виведення), CDO (комплексне цифрове виведення), РГО-регулятор;
автоконфігурування й самодіагностика;
функції активного планувальника мережі;
hot Plug&Play;
простота підключення до SCADA-систем;
10,9x10,9x9,1 см;
діапазон робочих температур від -40°С до +60°С ;
вібрації від 10 Гц до 500 Гц.
Рисунок 6.6 - Промисловий контролер Ethernet FP-1600
87
Характеристики промислового контролера Ethernet FP-1600:
Fast Ethernet ТСРЯР 10Base (10 Мб/с), 100BaseTX (100 Мб/с), довжина сегмента - 100 м;
вузлів Field Point - 9;
кількість банків у мережі - 1024;
автоконфігурування й самодіагностика;
обмін даними по подіях (трафік);
hot Plug & Play;
простота підключення до SCADA-систем;
10,9x10,9x9,1 см;
діапазон робочих температур від -40°С до +55°С ;
вібрації від 10 Гц до 500 Гц.
6.3. Інтелектуальні контролери SMART I/O і SMART2
Виробник контролерів SMART I/O і SMART2 - фірма PEP Modular Computers.
SMART - недорогий програмований контролер для промислової автоматизації, що базується на технології "Відкриті магістрально-модульні системи", і призначений для побудови простих систем керування об'єктом з невеликим числом каналів введення/виведення (до 100) і невисокими вимогами до швидкості збору й обробки інформації. SMART I/O і SMART2 повністю програмно сумісні з потужнішими системами VME9300 і IUC9300. Вони також поєднують у собі можливості керуючого комп'ютера реального часу й програмованого логічного контролера - PLC.
На відміну від традиційних PLC, контролер SMART не обмежений жорсткими рамками вбудованих бібліотечних функцій. Він може виконувати програми, написані на будь-яких мовах програмування.
SMART I/O складається з базового блоку SMART-BASE, що має 3 роз'єми для змінних модулів введення/виведення (рис.6.7), і додаткових блоків SMART-EXT, кожний з яких має 2 роз'єми для змінних модулів введення/виведення. До одного блоку SMART-BASE можна підключати до 4-х блоків SMART-EXT (усього до 11 модулів введення/виведення).
SMART2 може складатися з 5 базових блоків. У кожному із блоків може розташовуватися до 3-х функціональних модулів. Відповідно, максимальна кількість модулів у контролері - 15. На рис.6.8 представлений контролер SMART2 із двома базовими блоками (шістьма функціональними модулями).
88
Рисунок 6.7 - Контролер SMART I/O
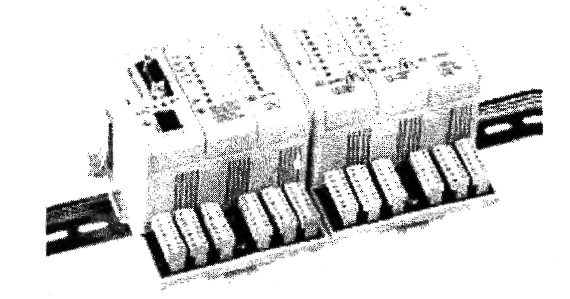
Рисунок 6.8 - Контролер SMART2
Модульна архітектура SMART дозволяє за допомогою змінних модулів оптимізувати конфігурацію контролерів для конкретних завдань. Номенклатура модулів введення/виведення задовільняє практично всі потреби по підключенню датчиків і виконавчих
механізмів до контролера (табл.6.2).
89
Таблиця 6.2 - Модулі контролерів SMART
Найменування |
Опис модуля |
|
БАЗОВІ МОДУЛІ |
SMART-BASE |
Джерело живгення 24 V DC/DC, процесор Motorola MC68302/20 МГц, 512 Кб DRAM, 1 Мб EPROM, 1 Мб Flash-EPROM, 64 кб SRAM з батарейним живленням, 1 Кбіт послідовної EEPROM, годинники реального часу, 1*RS232, 1*RS485, операційна система реального часу OS-9 і ISaGRAF-інтерпретатор в EPROM, промислова локальна мережа PROFIBUS, 3 роз'єми для модулів введення/виведення SM-xxx |
SMART-EXT |
Модуль розширення для SMART-BASE, 2 роз'єми для модулів I/O |
SMART2-BASE |
Базовий модуль для SMART2, 3 слоти для установки модулів SMART2 |
SM2-CPU |
Процесорний модуль для SMART2; MC68LC302; 1.5 Мб або 512 кб DRAM; 1 Мб FLASH; 256 Кб SRAM; RS232 |
|
МОДУЛІ SMART |
SM-DIN1 |
8 дискретних входів, = 24 В, оптоізоляція 2500 В |
SM-DOUT1 |
8 дискретних виходів, = 24 В, 500 мА, оптоізоляція 2500 В |
SM-ACI1 |
8 дискретних входів, ~ 80 - 264 В, оптоізоляція 2500 В |
SM-AC01 |
6 дискретних виходів, ~ 80 - 264 В; 0,3 А (при t < 70 °С), 0,2 А (при t < 85 °С) |
SM-REL1 |
6 релейних виходів, до 250 В, до 2 А, навантаження до 60 Вт/125 В-А, час перемикання 4 мс, оптоізоляція 2500 В |
SM-SSI |
Модуль керування серво-приводом - І SSI канал, 2 дискретних входи = 24 В, 1 дискретний вихід = 24 В/500 мА, аналоговий вихід |
SM-DAD1 |
4 аналогових входи +/- 10 В, АЦП - 12 біт; 2 аналогових виходи +/- 10 В (0...10 ... 10 В), ЦАП - 12 біт |
SM-ADC1 |
6 аналогових входів +/- 10 В (0...20 мА), АЦП -12 біт, оптоізоляція 1000 В |
SM-DAC1 |
6 аналогових виходів +/- 10 В (0...20 мА), ЦАП 12 біт, оптоізоляція 1000 В |
SM-THERM |
4 входи для термопар, похибка перетворення 0,2 °С, оптоізоляція 1000 В |
SM-PT100 |
4 входи для термометрів опору PtlOO, похибка перетворення 0,2 °С, оптоізоляція 1000 В |
90
Продовження табл. 6.2
Найменування |
Опис модуля |
SM-RS232 |
Додатковий послідовний порт RS-232 (без модемних сигналів, один на SMART-BASE) |
SM-COUNT1 |
Лічильник 24 біт, 3 диференціальних входи, частота до 300 КГц; 2 виходи, максимальна частота 100 КГц |
SM-COUNT2 |
2 лічильники 16 біт, 2 диференціальних входи, частота до 300 КГц; 2 виходи, максимальна частота 100 КГц |
МОДУЛІ МЕРЕЖЕВИХ ІНТЕРФЕЙСІВ ДЛЯ SMART2 |
|
SM2-CAN |
Контролер мережі CAN, швидкість обміну І Мбод (до 40 м), 50 Кбод (до 1000 м) |
SM2-DP |
Контролер мережі Profibus-DP, 12 Mbod, RS-485 |
SM2-ETH |
Контролер Ethernet |
Кілька контролерів SMART можуть бути пов'язані між собою й з іншими контролерами промисловою мережею Profibus або CAN (рис.6.9).
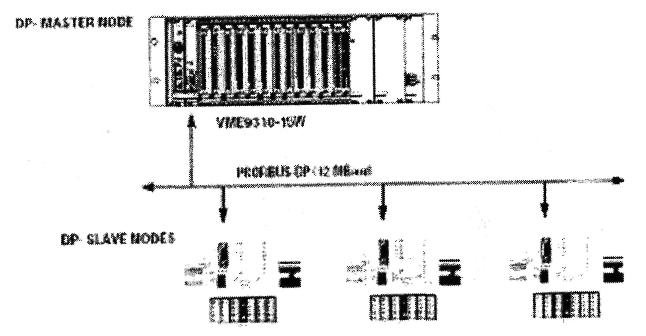
Рисунок 6.9 - Використання контролерів SMART2 у мережі Profibus
На рис.6.10 представлені деякі модулі контролера SMART2.
Традиційно програмовані логічні контролери ПЛК (PLC) програмуються на технологічних мовах програмування з використанням бібліотеки алгоритмів контролерів. Контролери SMART одні з перших контролерів, які поєднують у собі кращі риси промислового комп'ютера й традиційного PLC.
91
Контролери SMART мають багатозадачну,
багатокористувальницьку операційну систему реального часу OS-9, при цьому програмування може здійснюватись звичайними засобами програмування (для OS-9 - асемблер 68К, компілятор "Ultra-C" (стандарт ANSI-C, C++), інтегроване середовище FasTrak для Windows).
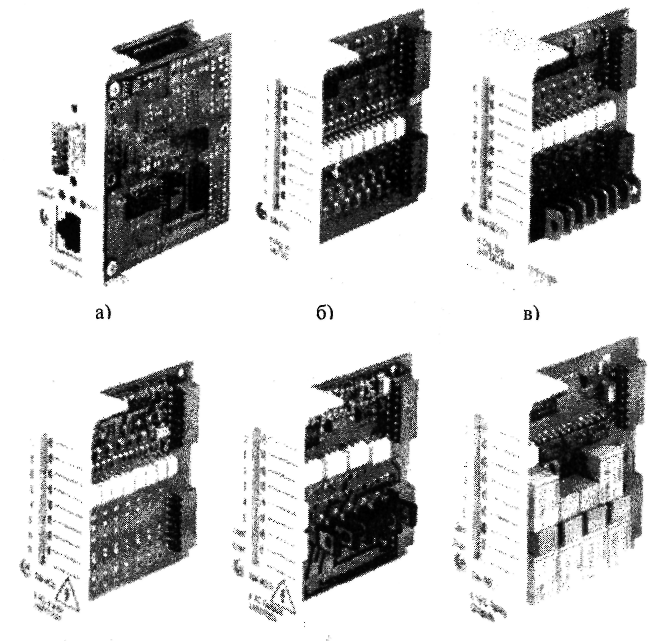
г) д) є)
а) - SM2-CPU; б) - SM-DIN1; в) - SM-DOUT1;
г) - SM-АСІ 1; д) - SM-АСО1; є) - SM-REL1
Рисунок 6.10- Модулі контролера SMART2
92
Програмування контролерів SMART може здійснюватися також з використанням технологічних мов програмування, що відповідають міжнародному стандарту ІЕС61131-3, наприклад, за допомогою пакета ISaGRAF фірми CJ International. При використанні в сполученні з OS-9 ядро ISaGRAF виконується точно так само, як і будь-яке завдання користувача, і приймає керування завантаженим в PLC додатком. Платформою розробки для ISaGRAF служить персональний комп'ютер з операційною системою Windows.