

Ж. Исследование системы при комбинированном регулировании
1. Добавить в модель исходной системы цепь компенсации возмущения, включающую в себя безынерционное звено с коэффициентом передачи kв (рис. 1).
2. Сохранить значение коэффициента усиления разомкнутой системы, подобранное в п.7 раздела А, и установить g0 = 0, f0 = 10. По формуле (11) рассчитать и установить такое значение коэффициента kв, чтобы xуст обратилась в ноль. Зарегистрировать для отчета график x(t) и заполнить строку 16 табл. 2.
3. Устанавливая значения f0 = 20, 30, 40, зарегистрировать для отчета графики x(t), измерить величины xуст и заполнить строки 17–19 табл. 2.
4. Установить значения g0 = 30, f0 = 10. Зарегистрировать для отчета график x(t), измерить величину xуст и заполнить строку 20 табл. 2.
3. Содержание отчета
Структурные схемы системы, соответствующие выполненным разделам.
Результаты выполнения п.6 раздела А.
Заполненная таблица результатов, содержащая все строки табл. 2, соответствующие выполненным разделам, и кривые соответствующих переходных процессов.
Результаты расчета критических значений коэффициента усиления разомкнутой системы для всех выполненных разделов.
5. Выводы по каждому выполненному разделу работы.
Лабораторная работа № 2
Исследование сау с дискретной коррекцией
Цель работы – ознакомление с методикой синтеза алгоритмов управления, реализуемых бортовыми цифровыми вычислительными машинами (БЦВМ) летательных аппаратов (ЛА) [6], и исследование процессов в дискретных системах.
Основные сведения из теории
Упрощенная
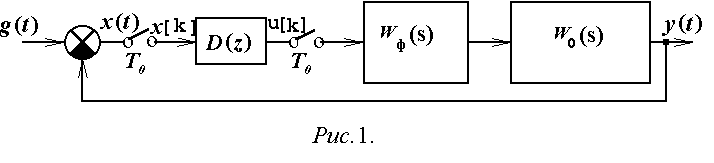
структурная схема системы управления
с БЦВМ изображена на рис.1, где
![]() – передаточная функция (ПФ) непрерывной
части,
– передаточная функция (ПФ) непрерывной
части,
![]() – ПФ формирующего устройства
(экстраполятора нулевого порядка),
– ПФ формирующего устройства
(экстраполятора нулевого порядка),
![]() – ПФ дискретного фильтра, отражающего
алгоритм управления, реализуемый БЦВМ.
– ПФ дискретного фильтра, отражающего
алгоритм управления, реализуемый БЦВМ.
Ключи,
периодически замыкающиеся с периодом
![]() ,
отражают эффект квантования по времени
в преобразователях аналоговой величины
в код и кода в аналоговую величину.
,
отражают эффект квантования по времени
в преобразователях аналоговой величины
в код и кода в аналоговую величину.
При таком подходе, не учитывающем эффекта квантования по уровню, структурная схема цифровой САУ соответствует импульсной системе с дискретной коррекцией.
Обычно при проектировании цифровых систем значение периода дискретности T0 выбирается максимально допустимым. При этом удается снизить требования, предъявляемые к цифровой машине в отношении быстродействия, но зато специфические свойства систем, связанные с квантованием сигналов по времени, проявляются особенно сильно.
Исследование динамических свойств непрерывно-дискретных систем существенно упрощается, если рассматривать поведение системы только в дискретные моменты времени kT0 , k=1,2,… . В этом случае динамика сиcтемы описывается разностными уравнениями или дискретными передаточными функциями.
Применительно к структуре САУ, показанной на рис.1, дискретная ПФ разомкнутой системы равна [6]:
![]() ,
(1)
,
(1)
где дискретная ПФ приведенной непрерывной части W0(z) определяется или путем z-преобразования переходной функции непрерывной части согласно выражению
![]() ,
(2)
,
(2)
или вычислением матриц P, Q эквивалентной дискретной модели как подматриц “расширенной” матричной экспоненты, формируемой по уравнениям состояния непрерывной части системы [2]. В последнем случае дискретная ПФ определяется известной формулой:
![]() .
(3)
.
(3)
Такой метод вычислений может быть легко выполнен на основе процедуры вычисления матричной экспоненты expm системы Scilab, и может быть рекомендован для построения дискретных моделей при известном периоде дискретности T0 (на заключительном этапе анализа).
Линейные дискретные алгоритмы управления могут быть описаны раз-ностным уравнением вида
![]() ,
(4)
,
(4)
где
![]() –
число запоминаемых значений величины,
поступающей на вход дискретного
корректирующего устройства (цифровой
машины),
–
число запоминаемых значений величины,
поступающей на вход дискретного
корректирующего устройства (цифровой
машины),
![]() – число запоминаемых значений управляющего
сигнала, av
и bv
– постоянные коэффициенты (параметры
закона управления).
– число запоминаемых значений управляющего
сигнала, av
и bv
– постоянные коэффициенты (параметры
закона управления).
Воспользовавшись аппаратом z-преобразования, от уравнения (4) можно перейти к ПФ дискретного корректирующего устройства:
 .
.
При
синтезе дискретных алгоритмов управления
используются логарифмические
псевдочастотные характеристики (ЛПЧХ).
Для перехода к псевдочастоте применяется
так называемое
![]() -
преобразование, то есть используется
подстановка [5]:
-
преобразование, то есть используется
подстановка [5]:
![]() .
(5)
.
(5)
где
![]() – абсолютная псевдочастота.
– абсолютная псевдочастота.
Тогда псевдочастотная ПФ разомкнутой системы примет вид
![]() .
(6)
.
(6)
Расчёт
дискретных систем вызывает большие
трудности в связи с более сложной
процедурой получения частотных
характеристик, в частности,
![]() .
В работе используется приближённый
способ построения ЛПЧХ, основанный на
раздельном их построении для области
низких и высоких частот [6]. В частном
случае, когда период дискретности
.
В работе используется приближённый
способ построения ЛПЧХ, основанный на
раздельном их построении для области
низких и высоких частот [6]. В частном
случае, когда период дискретности
![]() выбран так, что для любой постоянной
времени
выбран так, что для любой постоянной
времени
![]() ,
входящей в ПФ объекта
,
входящей в ПФ объекта
![]() ,
выполняется условие
,
выполняется условие
![]() ,
частотная ПФ
,
частотная ПФ
![]() ,
входящая в выражение (6), может быть
определена без предварительного
вычисления
,
входящая в выражение (6), может быть
определена без предварительного
вычисления
![]() следующим образом:
следующим образом:
![]() .
(7)
.
(7)
В лабораторной работе производится выбор алгоритма БЦВМ для канала угловой стабилизации ракеты, причём исследование ведётся по максимально упрощённым динамическим схемам, учитывающим только основное движение ракеты как жёсткого тела. Рассматриваются следующие формы упрощенной ПФ ЛА:
– форма 1
![]() (8)
(8)
– форма 2
![]() (9)
(9)
Выполнив z-преобразование по формуле (2) для объекта с ПФ (8) и последующей заменой (5), приходим к частотной ПФ неизменяемой части:
![]() .
(10)
.
(10)
Для
определения частотной ПФ, соответствующей
объекту с ПФ (9), следует поступить
аналогично. Тогда с учетом условия
![]() для области низких частот получим
для области низких частот получим
![]() .
(11)
.
(11)
В области высоких частот псевдочастотная характеристика (ПЧХ) объекта (9) приводится к виду (10), где параметр k0 следует заменить на k0/T2 . На основании формул (11) и (10) приближенное представление ПЧХ для всего частотного диапазона определится выражением
![]() .
(12)
.
(12)
Таким образом, и в этом случае приходим к приближенному выражению (7).
Нетрудно
убедиться, что при отсутствии дискретной
коррекции, то есть при
![]() ,
замкнутая система как с объектом (8), так
и с объектом (9) не может быть устойчивой.
Для обеспечения устойчивости дискретный
фильтр должен создавать опережение по
фазе. Следовательно, ПЧХ этого фильтра
можно выбрать в виде
,
замкнутая система как с объектом (8), так
и с объектом (9) не может быть устойчивой.
Для обеспечения устойчивости дискретный
фильтр должен создавать опережение по
фазе. Следовательно, ПЧХ этого фильтра
можно выбрать в виде
![]()
![]() .
(13)
.
(13)
Из (10) и (12) с учётом (13) следуют желаемые ПЧХ разомкнутой системы для рассматриваемых моделей объектов:
![]() (14)
(14)
![]() .
(15)
.
(15)
Им соответствуют желаемые ЛАХ, представленные на рис.2 и отмеченные цифрами 1 и 2.
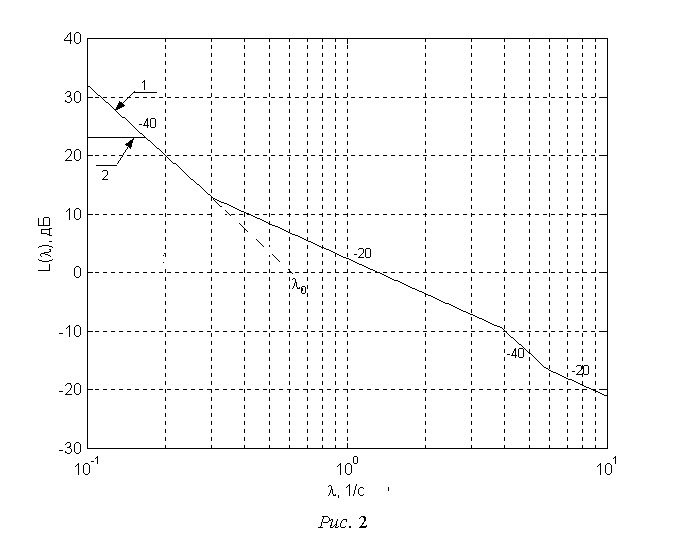
Базовая частота для первой из них
![]() ,
(16)
,
(16)
а для второй
![]() .
(17)
.
(17)
Так как в низкочастотной области логарифмические характеристики непрерывной и дискретной систем практически совпадают, для их формирования в этой области можно применять все существующие рекомендации, разработанные для синтеза непрерывных систем [3].
В замкнутой дискретной системе, ПЧХ которой в разомкнутом состоянии приближенно приводится к виду
 ,
,
где
![]() –
сумма малых постоянных времени, а
постоянным времени
–
сумма малых постоянных времени, а
постоянным времени
![]() соответствуют сопрягающие частоты,
меньшие частоты среза, будет обеспечен
заданный показатель колебательности
М,
если выполняются следующие условия
[6]:
соответствуют сопрягающие частоты,
меньшие частоты среза, будет обеспечен
заданный показатель колебательности
М,
если выполняются следующие условия
[6]:
– сумма
сопрягающих частот, меньших частоты
среза
![]() ,
должна удовлетворять условию
,
должна удовлетворять условию
![]() ,
,
– сумма
малых постоянных времени, соответствующих
сопрягающим частотам, большим частоты
среза
![]() ,
должна быть ограничена, а именно
,
должна быть ограничена, а именно
![]() .
.
Применительно
к системе с дискретной коррекцией,
синтезируемой в данной работе с ПЧХ
вида (14), (15), параметры
![]() ,
,
![]() и период дискретности
и период дискретности
![]() должны удовлетворять условиям
должны удовлетворять условиям
![]() ,
(18)
,
(18)
![]() (19)
(19)