4. Проектировочный расчет механической системы управления
Кинематическая схема приведена на рис. 4.1
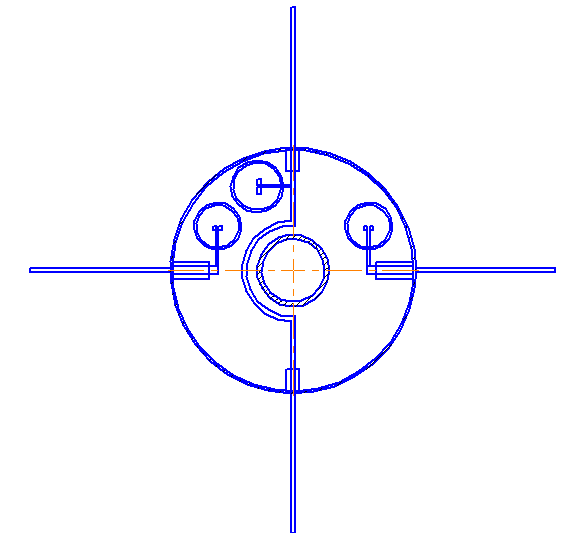
Рисунок 4.1 - Кинематическая схема
4.1 Проектировочный расчет рулевой машинки
Для отклонения системой управления аэродинамических органов управления на заданный угол, необходимо преодолеть шарнирные моменты, возникающие на них. Эти функции возложены на силовые приводы органов управления. В качестве силовых приводов для заданного типа ЛА чаще всего применяются пневматические РМ, проектирование которых будет выполнено.
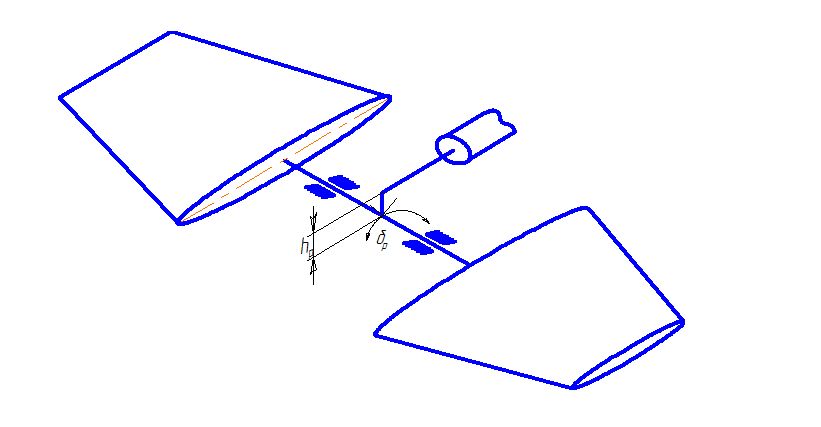
Рисунок 5.1 – Кинематическая схема механизма отклонения консолей
Поскольку центр давления руля не совпадает с осью вращения, то возникает шарнирный момент:
 .
.
.В качестве материала конструкции силового цилиндра выбираем деформируемый алюминиевый сплав Д16Т, со следующими характеристиками:

В качестве материала конструкции штока и шатуна выбираем Сталь 45:

Максимальное давление в рабочей полости силового цилиндра рулевой машинки:
 .
.
Принимаем
 .
.
Тогда максимальный перепад давлений в рабочих камерах рулевой машинки:

Ход поршня рулевой машинки составляет удвоенное произведение длины рычага на синус наибольшего угла отклонения управляющей поверхности.
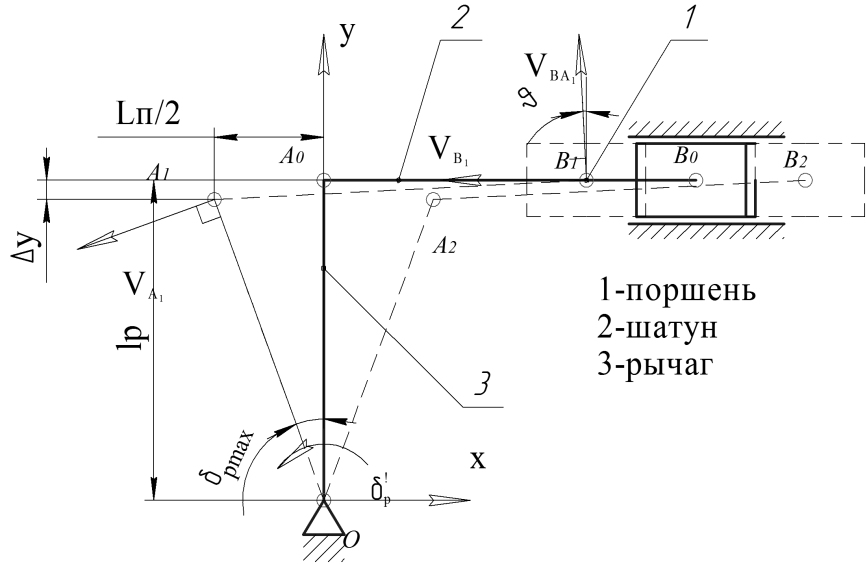
Рисунок 5.2 – Схема силового привода
Длина
рычага
 .
.
Максимальная
скорость поршня достигается при
 таким образом, максимальная скорость
равна:
таким образом, максимальная скорость
равна:
 .
.
Предельный
угол отклонения рулевых поверхностей
 .
.
Ход поршня рулевой машинки:

Максимальный нагрузочный момент:
 .
.
Величина усилия, развиваемого приводом может быть рассчитана из условия равенства потребной и располагаемой мощностей привода:

где
 – число рулевых поверхностей;
– число рулевых поверхностей;
 –
число рулевых машинок используемых для
отклонения рассматриваемых рулевых
поверхностей;
–
число рулевых машинок используемых для
отклонения рассматриваемых рулевых
поверхностей;
 –
усилие, развиваемое приводом.
–
усилие, развиваемое приводом.
Отсюда:

Определяем эффективную площадь поршня:

Определяем длину цилиндра:

Определяем длину штока:

Определяем диаметр штока:

Определяем диаметр силового цилиндра:
 .
.
Определяем толщину обечайки силового цилиндра:

где
 –
коэффициент запаса прочности для сосудов
высокого давления.
–
коэффициент запаса прочности для сосудов
высокого давления.
Принимаем

Наружный диаметр силового цилиндра:

Диаметр корпуса датчика обратной связи:

4.2 Конструкция и проектирование приводного вала
Приводной вал является опорой для органов управления и последним звеном в кинематической цепи передачи усилия от рулевой машинки. В данном ЛА использована схема, изображенная на рис. 5.1 В данной схеме вал жестко связывает между собой консоли управляющих поверхностей и проходит через весь корпус ЛА.
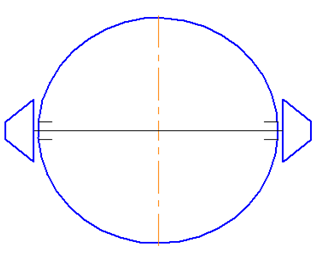
Рисунок 5.1
Нагрузкой на приводной вал служат
изгибающие моменты
 ,
крутящие моменты
,
крутящие моменты
 и
перерезывающая сила
и
перерезывающая сила
 ,
передаваемые на него с органов управления.
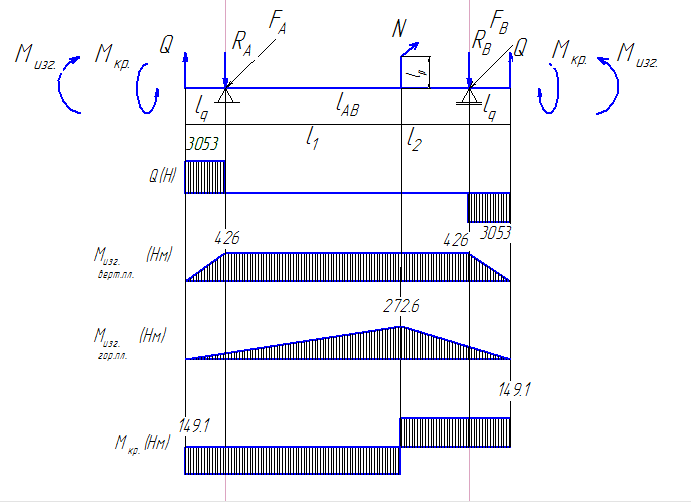
Расчетная схема приводного вала –
двухопорная балка, нагруженная
сосредоточенными силами, крутящим и
изгибающим моментами, показана на
рисунке 5.2.
,
передаваемые на него с органов управления.
Расчетная схема приводного вала –
двухопорная балка, нагруженная
сосредоточенными силами, крутящим и
изгибающим моментами, показана на
рисунке 5.2.
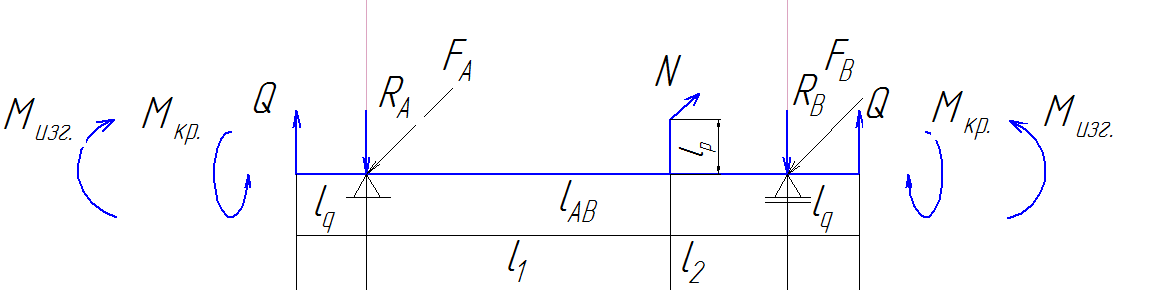
Рисунок 5.2- Схема нагружения приводного вала
4.2.1 Нагрузки, действующие на приводной вал.
Исходные данные:
 -изгибающий
момент;
-изгибающий
момент;
 -крутящий
момент;
-крутящий
момент;
 -пререзывающая
сила;
-пререзывающая
сила;
 -продольная
сила действующая вдоль штока;
-продольная
сила действующая вдоль штока;
 -расстояние
от точки
до ближайшей опоры;
-расстояние
от точки
до ближайшей опоры;
 -расстояние
между опорами;
-расстояние
между опорами;
 -расстояние
от точки А до плоскости действия силы
-расстояние
от точки А до плоскости действия силы
 ;
;
 -
расстояние от точки B до
плоскости действия силы
;
-
расстояние от точки B до
плоскости действия силы
;
 -расстояние
от оси вала до линии действия силы
;
-расстояние
от оси вала до линии действия силы
;
Определим реакции в опорах А и В;