

Параметров
Определяемый параметр |
Значения вылетов крана, мм |
|||||
R1=Rmin= |
R2 = |
R3= |
R4= |
R5= |
R6=Rmin= |
|
NB, кг Q, кг |
|
|
|
|
|
|
2 Измеряется значение В.
3 При отсутствии груза на крюке для каждого вылета R по динамометру определяются значения NB и заносятся в таблицу 4.1.
4 По формуле (4.8), принимая Ky = 1,4, расчетом определяют значения Q и заносят в таблицу 4.1.
5 По полученным данным строятся графики зависимостей; NB = f(R) и Q=f(R).
4.4 Содержание отчета
1 Цель работы.
2 Принципиальная схема модели крана, кинематические схемы всех механизмов, схемы запасовки грузовых и стреловых канатов, схемы предохранительных устройств.
3 Результаты экспериментов в табличной форме (см.табл.4.1).
4 Графики зависимостей NB = f(R) и Q=f(R).
5 Выводы.
4.5 Контрольные вопросы
1 Чем отличается грузовая и собственная устойчивость стрелового передвижного крана?
2 Чем отличаются ограничители грузоподъемности от ограничителей грузового момента?
3 Что должен делать машинист крана при срабатывании ограничителя грузового момента?
4 Какие факторы, кроме устойчивости, сдерживают увеличение грузоподъемности крана?
5 Какие внешние силы, действующие на реальный кран, создают опрокидывающий момент?
5 Лабораторная работа 5
Изучение конструкций и определение технических
Параметров уравновешенных стреловых устройств
Грузоподъемных кранов
Цель работы: изучение конструкций уравновешенных стреловых устройств; экспериментальное определение траектории движения груза при изменении вылета; определение величины и характера изменения грузового неуравновешенного момента.
5.1 Основные теоретические положения
На стреловых кранах, у которых изменение вылета груза осуществляется путем качания стрелы, применяются неуравновешенные и уравновешенные стреловые устройства.
При неуравновешенных стреловых устройствах подъем или опускание стрелы будет сопровождаться подъемом или опусканием груза. Кроме того, стрелы таких кранов, как правило, не уравновешиваются противовесами. Поэтому качание стрелы с грузом требует значительной мощности привода механизма изменения вылета. По этой причине на кранах с неуравновешенными стреловыми устройствами изменение вылета стрелы является установочным движением и производится обычно при отсутствии груза. Отметим, что при качающихся стрелах вылет груза и вылет стрелы адекватны, так как крюковая подвеска подвешивается к блокам на оголовке стрелы.
Примером применения неуравновешенных стреловых устройств являются автомобильные, пневмоколесные, гусеничные и железнодорожные краны, за исключением тех кранов, где установлена телескопическая стрела.
При телескопических стрелах изменение вылета путем выдвижения секций разрешается производить при подвешенном на стреле грузе. Но эти стрелы в настоящей работе не рассматриваются.
Уравновешенные стреловые устройства применяются на тех кранах, где изменение вылета груза является рабочим движением. Эти устройства обеспечивают идеально горизонтальную или близкую к горизонтали траекторию движения груза. При этом вес стрелы и связанных с ней элементов (канаты, блоки, хобот, оттяжка и т.д.) уравновешиваются с помощью подвижного стрелового противовеса.
В случае отклонения траектории груза от горизонтали или при неполном уравновешивании элементов стрелового устройства привод механизма изменения вылета преодолевает сопротивления в виде момента от негоризонтальности перемещения груза Мнг и момента от неуравновешенности стрелового устройства Мну, приведенных к оси качания стрелы.
Рассматривая только устройства, обеспечивающие горизонтальную траекторию груза, различают следующие типы уравновешенных стреловых устройств:
1 Прямая стрела с уравнительным полиспастом.
2 Прямая стрела с уравнительным блоком.
3 Прямая стрела с уравнительным барабаном,
4 Прямая стрела с подвижным шарниром качания.
5 Шарнирно-сочлененное стреловое устройство с профилированным хоботом и гибкой оттяжкой.
6 Шарнирно-сочлененное стреловое устройство с прямым хоботом и гибкой оттяжкой.
7 Шарнирно-сочлененное стреловое устройство с прямым хоботом и жесткой оттяжкой.
8 Шарнирно-сочлененное стреловое устройство с прямым хоботом, жесткой оттяжкой и подвижной осью качания стрелы (с шарнирным параллелограммом).
Из вышеперечисленных типов идеально горизонтальное перемещение груза при качании стрелы достигается при стреловых устройствах по и.4 (портальный кран с откатной стрелой фирмы "Кампнагель", Германия [14]) и по пп.5, 8 (краны фирмы "Вабкок-Вилькокс", "Ганц", "Кампнагель [5]). Однако, при этом усложняется конструкция стреловых устройств, что ограничило их применение на стреловых кранах.
Стреловые устройства по пп.1,2,3,6,7 не обеспечивают идеально горизонтальной траектории груза, но вследствие незначительных отклонений груза от горизонтали и упрощенной конструкции получили широкое распространение на портальных, плавучих, башенных и других типах кранов. Например, на 90% портальных кранов применяются следующие типы стреловых устройств: шарнирно-сочлененные (пп.6 и 7) - 47%, с уравнительным полиспастом (п.1) - 32%, с уравнительным блоком (п.2) - 10% [16]. Стреловые устройства с уравнительным барабаном (п.3) наиболее широко распространены на башенных кранах с подъемной стрехой и на стреловых самоходных кранах.
В настоящей лабораторной работе предметом изучения являются стреловые устройства по пп.1,3 и 7.
Прямая стрела с уравнительным полиспастом (рисунок 5.1) обеспечивает пологую траекторию движения груза вследствие изменения длины Lуп. уравнительного полиспаста, в результате чего за счет перекатывания каната изменяется длина подвеса груза li.
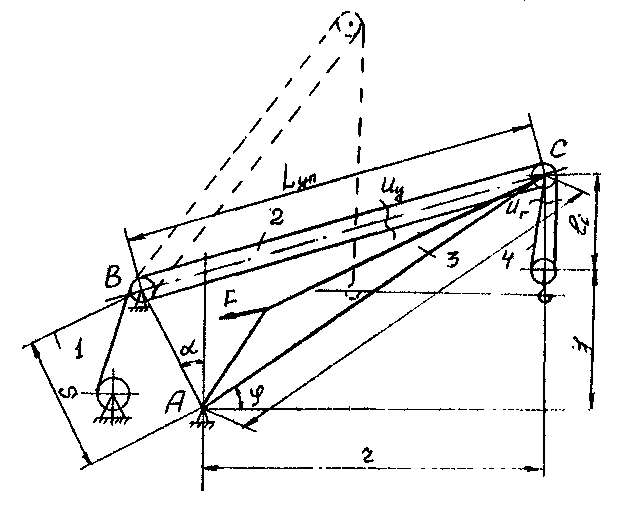
1 - подъёмная лебедка; 2 - уравнительный полиспаст;
3 - стрела; 4 - грузовой полиспаст
Рисунок 5.1 - Прямая стрела с уравнительным полиспастом
При качании стрелы усилием F суммарная длина каната Lк в уравнительном и грузовом полиспастах остается постоянной.
![]() .
/5.1/
.
/5.1/
При этом с уменьшением lуп увеличивается li , и наоборот.
В
общем случае ордината у
(см.рис.5.1) зависит от длины стрелы Lc
,
угла наклона стрелы φ,
размеров
S
и
![]() ,
длины каната и кратности полиспастов.
,
длины каната и кратности полиспастов.
Наименьшие
значения
![]() имеет
место при следующих значениях
параметров
имеет
место при следующих значениях
параметров
Вариант 1
![]()
![]() ,
Uy
=3, Uг
= 1.
,
Uy
=3, Uг
= 1.
Вариант 2
, Uy =5…6, Uг = 2.
Момент от негоризонтальности перемещения груза можно вычислить по формуле [14]
 ,
(5.2)
,
(5.2)
где
![]() .
.
Следует отметить, что перекатывание грузового каната по блокам при качании стрелы снижает срок службы каната.
Прямая стрела с уравнительным барабаном (рисунок 5.2) также обеспечивает приблизительно горизонтальное перемещение груза при качании стрелы благодаря тому, что одна ветвь простого грузового полиспаста навивается на уравнительный барабан, жестко соединенный со стрелоподъемным барабаном.
При этом направления навивки грузового и стрелового канатов являются противоположными.
.
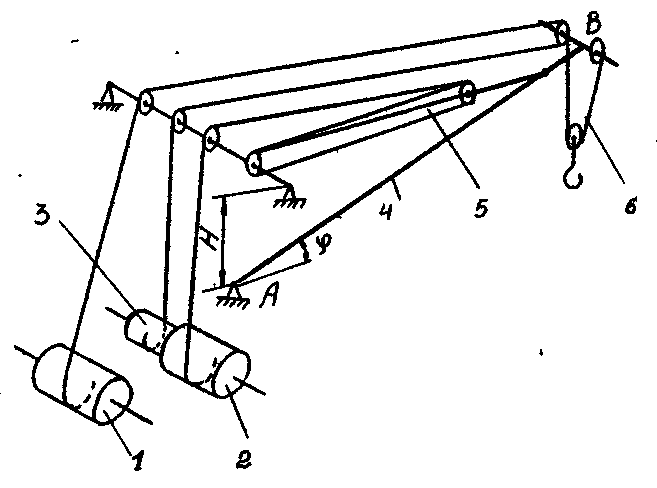
1 - грузовой барабан; 2 - стрелоподъёмный барабан; 3 - уравнительный барабан; 4 – стрела; 5 – стрелоподъёмный полиспаст; 6 – грузовой полиспаст
Рисунок 5.2 - Прямая стрела с уравнительным барабаном
С помощью уравнительного барабана увеличивается длина подвеса груза при подъеме стрелы и наоборот, т.е. происходит перекатывание грузового каната по блокам, снижающее его долговечность,
В общем случае траектория горизонтального движения груза зависит от кратности страхового и грузового полиспастов, длины стрелы, координат оси качания стрелы я оси неподвижных блоков, диаметра и конфигурации уравнительного барабана.
При изменении угла наклона стрелы от φmin до φmax максимальное вертикальное перемещение груза может быть определено по формуле [15]
 (5.3)
(5.3)
![]()
 ,
,
где Lc - длина стрелы (Lc = [AB], cм. рис .5.2);
H - превышение по высоте оси неподвижных блоков над осью качания стрелы;
Uc - кратность стрелового полиспаста;
Vг и Vc - скорости соответственно грузового каната, навивающегося на уравнительный барабан, и стрелового каната.
Формула (5.3) получена для случая, когда канат со скоростями Vг и Vс на участке от оголовка стрелы до оси неподвижных блоков параллельны между собой.
Шарнирно-сочлененное стреловое устройство с прямым хоботом и жесткой оттяжкой при проходе грузовых канатов по периметру стреловой системы (вдоль хобота и вдоль оттяжки) имеет эквидистантные траектории конца хобота (точка А) и груза (рисунок 5.3).
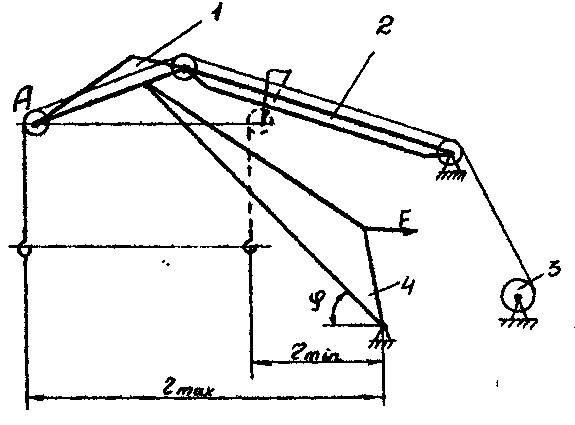
1 - прямой хобот; 2 - оттяжка; 3 – механизм подъема; 4 - стрела
Рисунок 5.3 - Шарнирно-сочлененное стреловое устройство
Поэтому при проектировании необходимо добиться приемлемой траектории конца хобота. При качании стрелы длина подвеса груза остается постоянной, поскольку перекатывания грузового каната по блокам не происходит. Значения и Мнг определяются графическим или аналитическим методом [14,17,18].
Максимальные допускаемые и фактические значения для различных типов стреловых кранов приведены в таблице 5.1.
Таблица 5.1 - Отклонения груза от горизонтали
Тип крана |
Максимальное допускаемое значение |
Фактические значения |
Примечание |
Портальные
|
0,15 (ГОСТ 11283 – 73) |
(0,01…0,04)
|
-
|
Плавучие перегрузочные
|
0,1 (ГОСТ 5534– 79) |
-
|
-
|
Судовые
|
0,07 (ГОСТ 25938 – 83) |
-
|
-
|
Башенные
|
0,1Rmax (ГОСТ 13556 – 85)
|
0,015…0,048
|
При двукратном стреловом полиспасте |
Самоходные стреловые |
- |
(0,025…0,03) |
- |
В таблице 5.1 обозначено
![]() ,
,
где Rmax и Rmin - максимальный и минимальный вылет груза.
Неуравновешенный грузовой момент Мнг оказывает влияние на нагруженность механизма изменения вылета и элементов стрелового устройства, на параметры системы уравновешивания с помощью противовеса. Характер изменения Мнг определятся характером траектории движения груза при изменении вылета. На рисунке 5.4 в качестве примера показаны траектории груза и соответствующие им моменты Мнг, приведенные к оси качания стрелы.
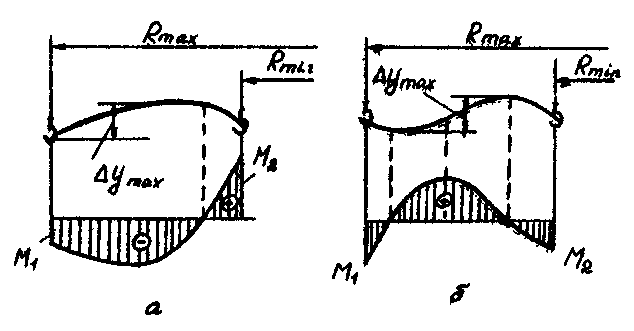
Рисунок 5.4 - Траектории движения груза и кривые неуравновешенных
грузовых моментов до прямой стрелы с уравнительным
полиспастом (а) и для шарнирно-сочлененного
стрелового устройства (б)
При известной траектории движения груза, построенной в виде зависимости у = f(φ), где φ - угол наклона стрелы (см.рис.5.1, 5.2, 5.3), величину Мнг можно определить из уравнения работ
![]() ,
(5.4)
,
(5.4)
где G - вес подвешенного груза;
![]() и
и
![]() -
малое
перемещение грузf
по вертикали и соответствующее ему
малое угловое перемещение стрелы.
-
малое
перемещение грузf
по вертикали и соответствующее ему
малое угловое перемещение стрелы.
Тогда
![]() ,
(5.5)
,
(5.5)
где
![]() - тангенс угла, образованного касательной
к траектории груза с осью абсцисс
(рис.5.5).
- тангенс угла, образованного касательной
к траектории груза с осью абсцисс
(рис.5.5).
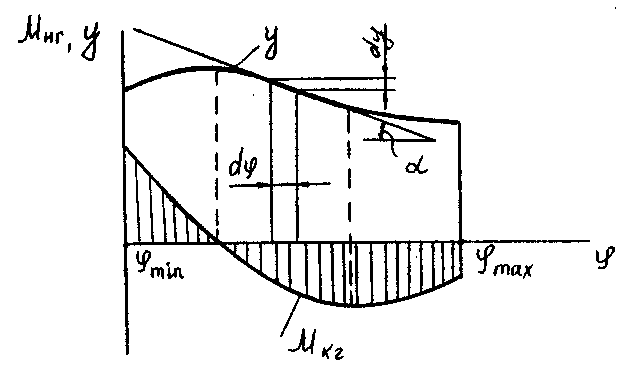
Рисунок 5.5 - Схема к определению Мнг
При решении задачи во оптимизации стреловых устройств в качестве критерия оптимизации принимается масса устройства [17,18]. При этом, чтобы исключить из рассмотрения неприемлемые по моменту Мнг варианты, принимают на вылете Rmax граничный момент [18] (см.рис.5.4)
для прямой стрелы с уравнительным полиспастом
Мнг = М1 = 0
для шарнирно-сочлененного стрелового устройства
Мнг
= М1
= -0,25G![]() .
.
Момент М2 (см.рис.5.4) определяет в ходе оптимизации.