3.5.5. Дифференциальное включение датчиков
У лучшить
метрологические характеристики датчиков
позволяет использование дифференциальной
схемы включения, которую рассмотрим
на примере индуктивного
дифференциально-трансформаторного
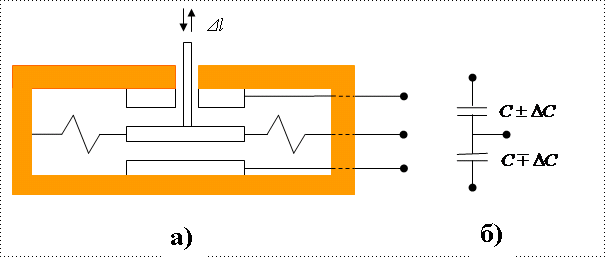
датчика перемещений (рис. 3.12). Такой
датчик состоит из двух близких по
характеристикам одиночных датчиков,
расположенных таким образом, что
приближение якоря к магнитопроводу
одного датчика вызывает удаление его
от магнитопровода другого датчика.
Вторичные обмотки обоих датчиков
включены последовательно встречно. В
исходном состоянии якорь находится на
одинаковом расстоянии от обоих
магнитопроводов, ЭДС вторичных обмоток
обоих датчиков одинаковы
лучшить
метрологические характеристики датчиков
позволяет использование дифференциальной
схемы включения, которую рассмотрим
на примере индуктивного
дифференциально-трансформаторного
датчика перемещений (рис. 3.12). Такой
датчик состоит из двух близких по
характеристикам одиночных датчиков,
расположенных таким образом, что
приближение якоря к магнитопроводу
одного датчика вызывает удаление его
от магнитопровода другого датчика.
Вторичные обмотки обоих датчиков
включены последовательно встречно. В
исходном состоянии якорь находится на
одинаковом расстоянии от обоих
магнитопроводов, ЭДС вторичных обмоток
обоих датчиков одинаковы
e2`=e2``= e0,
и выходное напряжение Uвых=0.
При перемещении якоря под воздействием измеряемой величины ЭДС на выходе одного датчика возрастает на величину Δеи, а другого на такую же величину падает. При встречном включении вторичных обмоток приращения ЭДС складываются, поэтому
Uвых= е0+Δеи-(е0-Δеи) = 2Δеи.
Поскольку ЭДС левой и правой вторичных обмоток находятся в противофазе, фаза выходного напряжения Uвых будет зависеть от того, в какую сторону отклонится якорь от нейтрального положения. Таким образом, абсолютная величина и фаза выходного напряжения будет определяться величиной и направлением перемещения якоря под действием измеряемой величины.
Дифференциальная конструкция обладает следующими преимуществами:
удвоение выходного напряжения (это следует из последней формулы);
компенсация дополнительных погрешностей (например, температурной ΔеД): Uвых= е0+Δеи+ΔеД -(е0-Δеи+ΔеД) = 2Δеи.
расширение линейного участка характеристики преобразования;
компенсация ненулевого начального сигнала на выходе датчика.
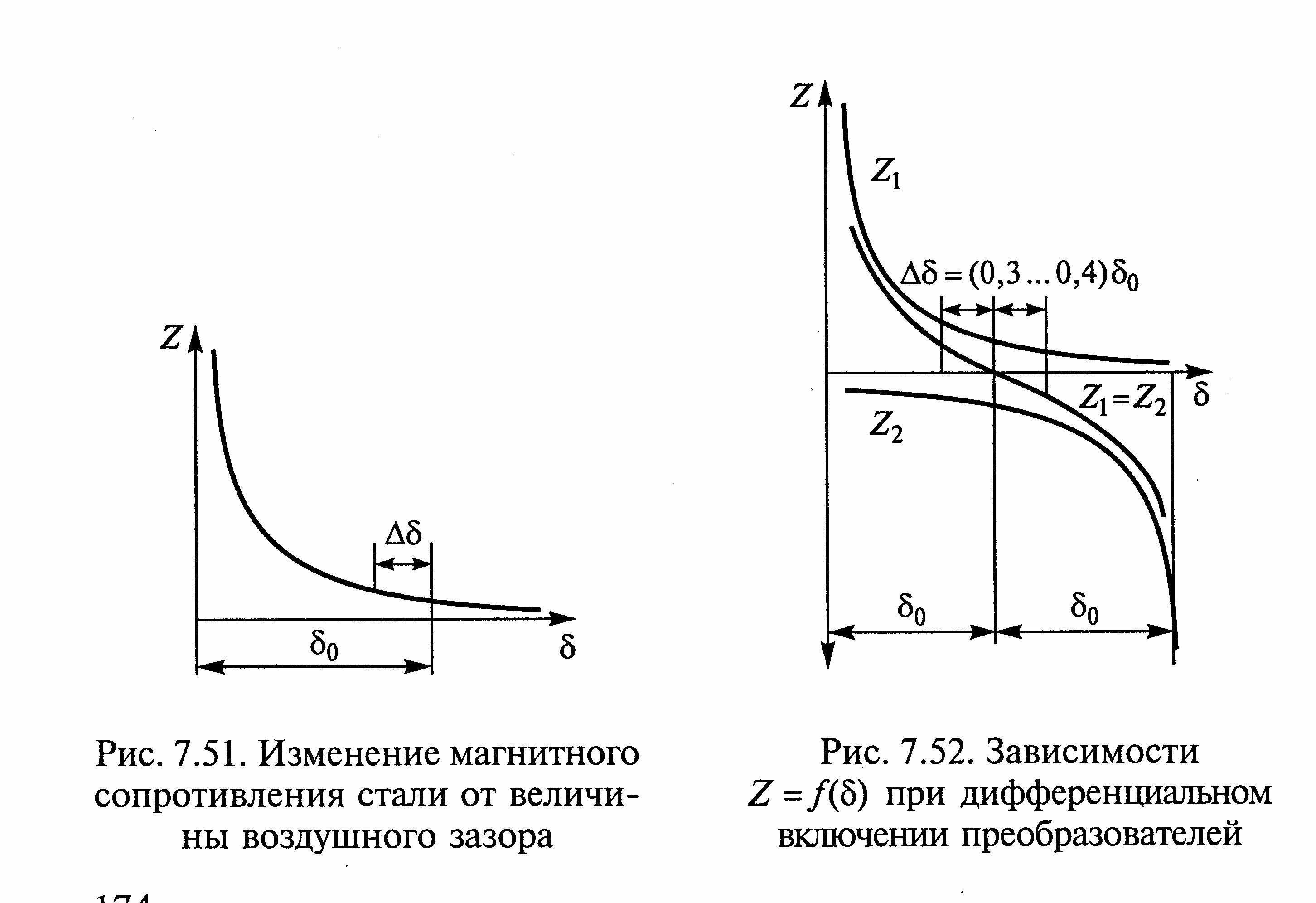
Дифференциальная конструкция позволяет сделать тонкой, а, следовательно, и лёгкой, подвижную часть магнитопровода; поперечное сечение магнитопровода делают таким, чтобы не было насыщения ферромагнетика, а разность (Ф1 – Ф2) при малых Δδ существенно меньше Ф1 и Ф2.
в одиночном датчике подвижная часть магнитопровода притягивается к неподвижной, что в данном случае является вредным эффектом, но в дифференциальной конструкции сила притяжения к первой и второй неподвижным частям магнитопровода компенсируются.
Эти (первые 4) преимущества характерны для дифференциальных конструкций датчиков всех видов (тензорезистивных, емкостных, оптических и т. д.) независимо от используемого принципа преобразования измеряемой величины в выходной электрический сигнал [13].

3.5.6. Оптические датчики
 В
основу принципа действия оптических
датчиков положена зависимость параметров
потока оптического излучения от значения
измеряемой величины. Оптический датчик
состоит из источника излучения,
оптического канала и приемника
излучения (рис. 3.13). Измеряемая
величина может воздействовать
непосредственно на источник излучения
и модулировать тот или иной параметр
излучаемого им потока Ф1, либо,
воздействуя на оптический канал,
модулировать соответствующий параметр
потока Ф1, преобразуя его в поток
Ф2. Выходная величина Y
формируется в результате воздействия
потока Ф2 на приемник излучения.
В
основу принципа действия оптических
датчиков положена зависимость параметров
потока оптического излучения от значения
измеряемой величины. Оптический датчик
состоит из источника излучения,
оптического канала и приемника
излучения (рис. 3.13). Измеряемая
величина может воздействовать
непосредственно на источник излучения
и модулировать тот или иной параметр
излучаемого им потока Ф1, либо,
воздействуя на оптический канал,
модулировать соответствующий параметр
потока Ф1, преобразуя его в поток
Ф2. Выходная величина Y
формируется в результате воздействия
потока Ф2 на приемник излучения.
Источники излучения можно разделить на тепловые и люминесцентные. К тепловым источникам можно отнести, например, лампу накаливания, костер, Солнце и звезды, теплокровных животных, а к люминесцентным – светодиоды, лазеры, светлячков и светящиеся микроорганизмы в морской воде, неоновые лампочки, газоразрядные трубки, используемые для рекламы, светящиеся в темноте циферблаты часов и других приборов.
Оптическое излучение характеризуется интенсивностью (мощностью потока), монохроматичностью, когерентностью, степенью поляризации.
Монохроматичным называется излучение, все колебания волн которого имеют одну и ту же длину волны λ. Степень монохроматичности излучения характеризуется шириной его частотного спектра Δν. Наиболее близко к идеальному монохроматическому излучение лазера, для которых Δν≈103 Гц.
Когерентными называются колебания, разность фаз между которыми постоянна. Когерентность излучения связана с его монохроматичностью (когерентным может быть только монохроматическое излучение.
Поляризация света характеризуется способностью электрического вектора Е всех волн излучения сохранять свою ориентацию в пространстве. Поляризованным называется свет, колебания вектора Е которого фиксированы строго в одной плоскости [10].
В оптических датчиках в качестве источника излучения наиболее часто применяются светодиоды и лазеры, иногда лампочки накаливания. При этом светодиоды и лампочки накаливания применяются в датчиках со сравнительно небольшой частотой модуляции светового потока (от единиц Герц до нескольких килогерц). Лазеры допускают гораздо более высокую частоту модуляции потока и, следовательно, позволяют передавать и принимать измерительную информацию с большей скоростью [13].
Лазер - источник электромагнитного излучения видимого, инфракрасного, ультрафиолетового и рентгеновского диапазонов, основанный на вынужденном излучении атомов и молекул. Важными свойствами лазерного луча являются большая мощность и высокая направленность излучения, монохроматичность, когерентность и поляризация. Эти свойства обусловили широкое распространение лазеров в качестве источников излучения в оптических датчиках, а также для передачи информации в МС по оптическим линиям связи.
Основными характеристиками лазера являются мощность излучения РИЗЛ, длина волны λ, ширина спектральной линии Δλ, угол расхождения луча.
Наибольшее распространение получили три типа лазеров: газовые, твердотельные и полупроводниковые.
Среди лазеров видимого и инфракрасного диапазонов полупроводниковые лазеры занимают особое положение по ряду своих характеристик. Размеры полупроводникового лазера могут быть сделаны очень малыми — порядка долей миллиметра. В полупроводниковых лазерах активным веществом обычно является арсенид галлия, арсенид индия, кремний с примесью индия. Основными преимуществами полупроводниковых лазеров являются малые габариты, высокий к.п.д., удобство возбуждения, высокое быстродействие, технологическая совместимость с элементами оптических интегральных схем.
Общим недостатком всех полупроводниковых лазеров является сравнительно невысокая направленность излучения, связанная с их малыми размерами, и трудность получения высокой монохроматичности.
В качестве приемников оптического излучения наиболее часто используются фотодиоды. Применяются также фоторезисторы, фототранзисторы, фототиристоры. Выходной сигнал фотоприемника определяется не только интенсивностью падающего на них излучения, но и его спектральным составом. Основными характеристиками фотоприемников являются световая, спектральная, статическая вольтамперная и частотная [13]. (лазерный дальномер) (сканер пространственный строительный) (лазерный триангуляционный датчик расстояния) (лазерный интерферометр) Датчик на основе эффекта растра
Простейшим и самым распространенным оптическим датчиком является оптопара: светодиод, подвижная непрозрачная заслонка и фотодиод. Заслонка механически связана с подвижным звеном МС, положение которого нужно контролировать. Такой датчик может работать в дискретном режиме (открыто-закрыто) и в аналоговом (степень освещенности фотоприемника определяется положением заслонки). Конструктивно объединенные в одном корпусе и согла
сованные по спектральным характеристикам источник и приемник (чаще всего это светодиод и фотодиод) называют оптроном. Оптрон может быть открытым (оптический канал может перекрываться подвижной заслонкой) и закрытым (в этом случае между источником и приемником излучения существует постоянная связь через оптическую среду (стекло, прозрачная пластмасса), а измеряемая величина воздействует на источник излучения (вход Х1 на рис. 3.13).
Упрощенный
пример использования оптического
датчика в технологическом процессе,
показан на рис. 3.14. Источник света 1
создает с помощью линзы-конденсора 2
пучок параллельных лучей, в котором
располагается исследуемая деталь 3.
Часть лучей задерживается деталью, а
оставшиеся лучи фокусируются линзой 4
на фотоприемнике 5. Освещенность
фотоприемника, а, следовательно, и
величина его фототока будут определяться
диаметром детали [ 14].
14].
Применение
оптических датчиков.
На рис. 3.15 представлена схема
фотоэлектрического датчика, который
преобразует абсолютное значение угла
поворота контролируемого вала в
многоразрядный двоичный код. Кодирующий
диск 1 (рис кодирующего диска) жестко
закреплен на контролируемом валу 2. Диск
1 представляющий собой стеклянное
основание, на котором фотоспособом
нанесена кодовая маска, образованная
несколькими (по количеству разрядов)
концентрическими кодовыми дорожками
с прозрачными и непрозрачными для света
сегментами. Для построения кодовой
маски наиболее часто используется
двоичный код Грея, обеспечивающий
надежность кодирования и простую схему
считывания. Осветитель, состоящий из
лампы 3 и конденсора 4, формирует световой
поток, падающий на кодирующий диск 1.
Луч света, проходя через прозрачные
сегменты кодовых дорожек диска и щелевую
диафрагму 5, освещает фотоприемники 6,
усиленные сигналы с которых принимаются
за двоичные единицы. Отсутствие сигналов
с других фотоприемников, перекрытых
непрозрачными сегментами кодовой маски,
соответствует двоичным нулям. В результате
каждому значению угла соответствует
определенная комбин ация
единиц и нулей, являющаяся цифровым
кодом измеряемого угла.
ация
единиц и нулей, являющаяся цифровым
кодом измеряемого угла.
Д остоинством
фотоэлектрического преобразователя
угловых перемещений в код является
высокая разрешающая способность,
соответствующая 12-16 двоичным разрядам
на один оборот вала, т. е. от 5` до 20`` [6].
остоинством
фотоэлектрического преобразователя
угловых перемещений в код является
высокая разрешающая способность,
соответствующая 12-16 двоичным разрядам
на один оборот вала, т. е. от 5` до 20`` [6].

Промышленные датчики
ЛАЗЕРНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ "HILTI"
Лазерные измерительные приборы "Hilti" применяются при любых разметочных операциях в строительстве. Достоинства лазерных измерительных приборов "Hilti": — высокоточные, компактные, неприхотливы к условиям стройки; — источником лазерного луча является диод AS/GA; — лазер класса 2 (IЕС825-1) мощностью менее 1 мВт абсолютно безопасен для глаз человека, но в то же время хорошо различим даже при ярком свете; — питание приборов от обычных батарей 1,5 В; — со всеми приборами может работать один человек, что значительно снижает трудозатраты. На все лазерные измерительные приборы "Hilti" предоставляется 1 год гарантии.
Лазерный дистанционный измеритель PD 28
|
Измерение расстояний в труднопроходимых местах без прямого доступа к объекту, расчет площади, объема, вертикальные измерения, горизонтальные измерения (встроенный пузырьковый уровень). Работает от двух обычных батарей типа АА (~ на 8000 измерений). Для работы с ним нужен всего один человек. Дальность измерения: от 10 см до 100 м. Точность: ± 2 мм на всей дистанции. Память на 1000 величин, возможность подключения к компьютеру для обработки данных. ЦЕНА (Euro): 811,00 |
|
|
|
|
Лазерный дистанционный измеритель PD 30
|
Быстрые и надежные измерения в пределах 200 м. Определение площадей, объемов и периметров одним нажатием кнопки. Откладывать нужные расстояния Легкий вес и "карманный" размер. Заряжается от электросети и автомобильного прикуривателя (как мобильный телефон). Большая дистанция измерения Опорная ножка для точных измерений из углов и труднодоступных мест. Технические характеристики: — точность измерения ± 1,5 мм; — диапазон измерения от 5 см до 70 м без мишени (с мишенью от 50 до 200 м); — время измерения < 0,5 сек; — память на 5 последних измерений; — 2 алкалиновые батареи на 15000 измерений (2 NiCd на 8000 измерений); — рабочая температура от -10 C до +50 C; — размеры (мм) 120 х 65 х 28; — вес 220 г. ЦЕНА (Euro): 443,00 |
|
|
|
|
Четырехлучевой лазерный нивелир PM 24
|
Предназначен для выравнивания конструкций по трем ортогональным плоскостям, откладывание отвеса и угла 90 градусов (выравнивание металлоконструкций, кладка плитки, инсталляция радиаторов, кондиционеров, разметка для вентиляции, проверка вертикальности и горизонтальности стен и оконных проемов, перенос отметок с пола на потолок). Технические характеристики: — точность разметки ±3 мм на 10 м; — время самовыравнивания менее 3 сек; — диапазон ±5 градусов от горизонтали самовыравнивания в обоих направлениях; — радиус работ до и свыше 30 м в зависимости от условий освещения; — 4 алкалиновые батареи типа АА (40 часов непрерывной работы) или 4 NiCad аккумулятора (10 часов непрерывной работы); — рабочая температура от -10 С до +45 C; — размеры (мм) 50 x 108 x 95. В комплект входят: металлический стенд, мишени, рамный фиксатор, настенный фиксатор, магнитный фиксатор, батареи, инструкция по эксплуатации. ЦЕНА (Euro): 664,00 |
|



Современная технология лазерного сканирования существенно повысила доступность пространственных моделей, позволяя выполнять подробнейшие съемки сложных сооружений значительно быстрее, чем традиционными методами. Ядро системы - сенсор, излучающий внутри некоторого пространства тысячи лазерных импульсов в секунду. Лазер сканирует помещение по вертикали и при этом вращается в горизонтальной плоскости, описывая полный круг. Дальномер определяет время распространения лазерного импульса до поверхности и вычисляет расстояние с миллиметровой точностью, а угловые датчики с высоким разрешением фиксируют значения азимута и угла наклона. В результате в реальном времени вычисляются полярные координаты каждой точки и записываются в полевой компьютер. При обработке измерений они преобразуются в пространственные прямоугольные координаты, по которым строится точная цифровая модель поверхности.
Л азерный
сканер автоматически вращается и
накапливает координаты окружающих
объектов с исключительной скоростью и
подробностью - свыше миллиона точек в
течение 10 минут. Цена: 131000
USD
азерный
сканер автоматически вращается и
накапливает координаты окружающих
объектов с исключительной скоростью и
подробностью - свыше миллиона точек в
течение 10 минут. Цена: 131000
USD
Триангуляционные лазерные датчики Датчики предназначены для бесконтактного измерения и контроля положения, размеров, профиля поверхности, деформаций, вибраций, сортировки, распознавания технологических объектов; измерения уровня жидкостей и сыпучих материалов.
П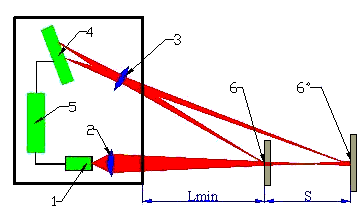 ринцип
работы
ринцип
работы
В основу работы датчика положен принцип оптической триангуляции. Излучение полупроводникового лазера 1 фокусируется объективом 2 на объекте 6. Рассеянное на объекте излучение объективом 3 собирается на CCD-линейке 4. Процессор сигналов 5 рассчитывает расстояние до объекта по положению изображения светового пятна на линейке 4.