

1.3.1. Математичний опис нагрівальної печі як простішого об'єкту регулювання
Хай нагрівальна піч є лінійним об'єктом без запізнювання. Розглянемо процес нагріву металу в печі, прийнявши наступні вихідні дані:
- дія, що управляє (відносна температура атмосфери печі)
Fупр = θпечі = К•Р (1.3.1)
- вихідний параметр (відносна температура металу) Хвих = θм ;
- допоміжні параметри:
- питома теплоємність металу С;
- маса металу m;
- поверхня нагріву S;
- коефіцієнт теплопередачі α.
Знайдемо кількість тепла, передану металу атмосферою печі:
Qм = α•S(θпечі — θм) •Dt (1.3.2)
Тепловміст металу
Qм = С• m•Dθм (1.3.3)
Прирівняємо (1.3.2) і (1.3.3):
С• m•Dθм = α•S(θпечі — θм) •Dt
Перетворюємо:
![]() (1.3.4)
(1.3.4)
Підставимо в (1.3.4) θпечі з (1.3.1) і перейдемо від приростів до диференціалів:
![]()
![]() (1.3.5)
(1.3.5)
Рішення диференціального рівняння (1.3.5) має вигляд:
![]() (1.3.6)
(1.3.6)
де постійна часу Т:
![]() (1.3.7)
(1.3.7)
стале значення температури металу:
![]() (1.3.8)
(1.3.8)
Перехідна характеристика печі, яка називається кривою розгону, відповідно до (1.3.5) матиме вигляд:
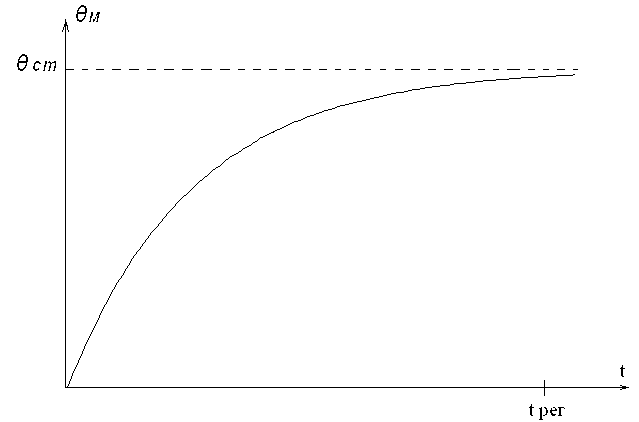
Рис. 1.5. Перехідна характеристика печі
Перехідний процес нагріву – аперіодичний, час регулювання в цьому випадку складає 3 – 4 постійних часу об'єкту.
1.3.2. Визначення параметрів об'єкту регулювання по кривій розгону
Реальна нагрівальна піч, як і багато інших об'єктів регулювання, як правило, є нелінійний об'єкт із запізнюванням. Тому часто аналітичне визначення його параметрів є складним завданням. В цьому випадку криву розгону знімають експериментально, а потім по ній визначають параметри об'єкту. Для цього спочатку визначають усереднений статичний коефіцієнт передачі об'єкту, вважаючи його лінійним в невеликому діапазоні характеристики поблизу набутого сталого значення вихідної величини:
![]() , (1.3.9)
, (1.3.9)
де Хст і Х0 – стале і початкове значення вихідної величини, Dy – відповідна зміна дії, що управляє.
Для визначення динамічних параметрів існує декілька методів. Розглянемо два найбільш поширені методи визначення динамічних параметрів об'єкту по наявній кривій розгону.
А) Метод дотичної.
Хай є експериментально одержана крива розгону об'єкту, приведена на рис.1.6.
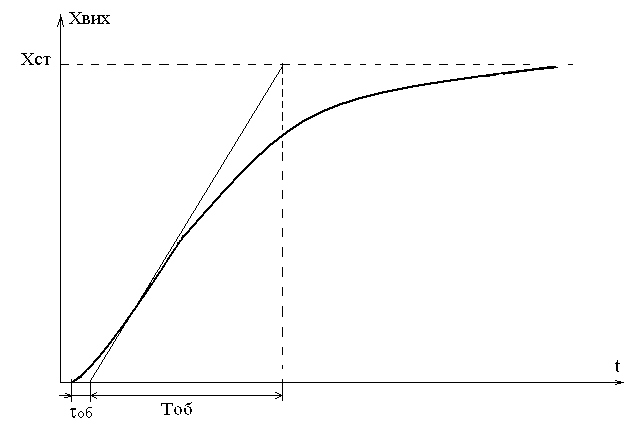
Рис. 1.6. Визначення параметрів об'єкту методом дотичної
Проводимо дотичну до кривої розгону в точці найбільшої швидкості зміни вихідної величини.
Відрізок між початком зміни вихідної величини і точкою перетину дотичною з віссю абсцис (вісь часу) дорівнює часу запізнювання об'єкту об.
Відрізок, рівний проекції на вісь абсцис відрізка дотичної між точками її перетину з віссю абсцис і з лінією сталого значення вихідної величини, дорівнює постійної часу об'єкту Тоб.
Б) Наближений графоаналітичний метод.
В цьому випадку:
1. На графіку (див. рис. 1.7) проводять дві горизонтальні лінії: одну на рівні Х1* у області перегину (зазвичай Х1* = 0,1 – 0,2 від Хст, типове значення Х1* =0,15), а другу на рівні Х2* = 0,7 – 0,9 від Хст ( типове значення Х2* = 0,85).
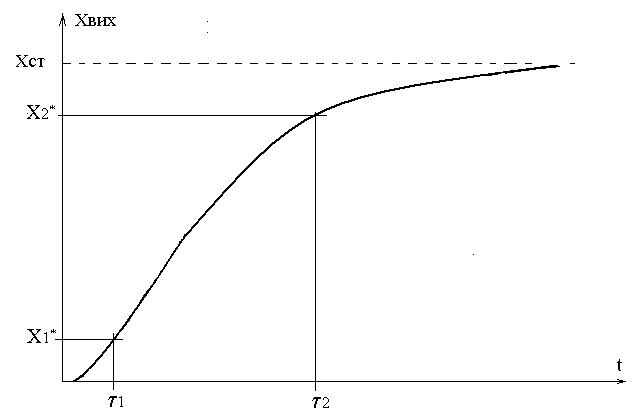
Рис. 1.7. Визначення параметрів об'єкту графоаналітичним методом
2. Знаходять значення 1 і 2, відповідні точкам перетину відповідних ліній з кривою розгону.
3. Параметри об'єкту знаходять із співвідношень:
![]() (1.3.10)
(1.3.10)
![]() (1.3.11)
(1.3.11)