

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
НАВЧАЛЬНИЙ ПОСІБНИК
до вивчення курсу
«АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ І МІКРОПРОЦЕСОРНА ТЕХНІКА»
Донецьк ДонНТУ 2008
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
НАВЧАЛЬНИЙ ПОСІБНИК
до вивчення курсу
«АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ І МІКРОПРОЦЕСОРНА ТЕХНІКА»
|
РОЗГЛЯНУТО: на засіданні кафедри електротехніки Протокол № 5 від 17.01.2008р.
|
|
ЗАТВЕРДЖЕНО: на засіданні навчально-видавничої ради ДонНТУ Протокол № 3 від 05.03.2008р. |
Донецьк ДонНТУ 2008
УДК 621.3.011.1(075)
Навчальний посібник до вивчення курсу «Автоматизація технологічних процесів і мікропроцесорна техніка» /С.С. Багдасарян, Н.Л.Тютюнник. Донецьк: ДонНТУ, 2008
Є частиною комплексу методичних матеріалів, що розроблені кафедрою електротехніки ДонНТУ для вивчення студентами теоретичної частини курсу “Автоматизація технологічних процесів і мікропроцесорна техніка” і являє собою стислий виклад розділів „Автоматизація технологічних процесів” і „Основи мікропроцесорної техніки” як складових частин єдиного курсу.
У розробці навчального посібника (комп’ютерна графіка) брала участь студентка гр. ТП-03з Мірошниченко Н.М.
Автори: С.С. Багдасарян, доц.
Н.Л. Тютюнник, ст. викл.
Відп. за випуск С.С. Багдасарян, доц.
Рецензент: Є. Б. Ковальов, проф.
1. Основи теорії автоматичного регулювання
Основні поняття і визначення
Керування яким-небудь технологічним об'єктом або процесом полягає у виробленні і реалізації рішень, які за даних умов забезпечують найбільш ефективне досягнення поставленої мети. Цілями керування технологічними процесами можуть бути: підтримка значення деякої фізичної величини із заданою точністю, зміна величини по заданому закону і деякі інші. Якщо керування здійснюється безпосередньо людиною, то таке керування називається ручним. Якщо ж керування здійснюється без безпосередньої участі людини, то таке керування називається автоматичним. Об'єктами керування являються частини або цілком технологічні процеси, окремі машини і агрегати. При найбільш простих цілях керування – підтримка заданого значення параметра або зміна параметра за жорсткою програмою – процес керування називають регулюванням, об'єкти керування – об'єктами регулювання, а систему керування в цілому – системою автоматичного керування (САК) або системою автоматичного регулювання (САР). Типова структура САР має вигляд:
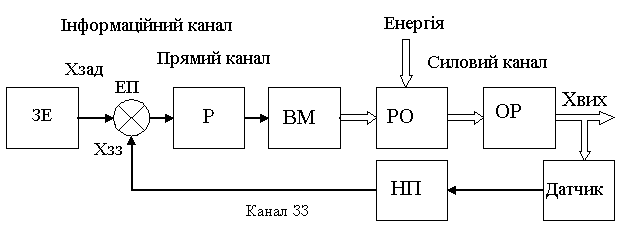
Рис. 1.1. Типова структура системи автоматичного регулювання
Загальний принцип роботи САР полягає в наступному:
- на підставі порівняння необхідного і фактичного значень регульованої величини проводиться керування потоком енергії в об'єкті регулювання так, щоб фактичне значення величини наближалося до потрібного.
Основні компоненти САР:
1. Задаючий елемент (ЗЕ) – виробляє необхідне значення регульованої величини (наприклад, температури, тиску, швидкості і т.п.) у форматі, прийнятому в структурі даної САР. Інколи ЗЕ виробляє також і закон зміни регульованої величини в часі – наприклад, швидкість набору температури в об'єкті, переходи між різними температурними режимами і т.п.
Формат представлення сигналів, що управляють, в САР може бути різним як по фізичній природі, так і по методах представлення інформації. У перших САР з механічними регуляторами інформаційні сигнали представлялися у вигляді регульованого зусилля пружини, тиску газу в трубці і т.п. В даний час практично всі САР мають інформаційну частину, що оперує з електричними сигналами. По методу представлення інформації такі САР діляться на аналогові і цифрові. У аналогових САР фізична величина представляється (як правило) електричною напругою або струмом в певному масштабі (тобто, замінюється електричним аналогом – звідси і назва). При цьому задаються номінальним діапазоном зміни напруги (струму) сигналів, що управляють. За звичай це 0...10 В або 0...5 В (0...20 мА) для величин без знаку, або –10 В...0...+10 В для величин, що можуть приймати негативні значення. Наприклад, для нагрівальної печі з максимальною температурою 1000°С можна прийняти масштаб: 10В відповідає 1000°С, тобто mt = 10В/1000 град = 0,01 В/град або 10 мВ/град. Аналогічним чином вибирають масштаби для будь-яких аналогових САР. До достоїнств таких систем відноситься порівняльна простота інформаційної частини (як правило, зроблена на операційних підсилювачах), можливість в процесі настройки спостерігати сигнали в різних точках системи осцилографом або навіть вольтметром. Недоліки аналогових систем – унікальність кожної системи для кожного об'єкту, а також порівняно невисока точність, пов'язана з необхідністю обробляти дуже малі значення напруг або малі їх зміни.
У цифрових САР фізична величина представляється у вигляді двійкового числа, і обробка сигналів ведеться методами чисельної математики. Детально цифрові системи розглядаються в другій частині курсу, а тут спиратимемося на аналогові системи, як простіші для розуміння процесів в САР.
2. Датчик (Д) спільно з нормуючим підсилювачем-перетворювачем (НП) утворюють канал зворотного зв'язку. Ці елементи перетворять вихідну фізичну величину (температуру, тиск і т.п.) в електричний сигнал, формат якого повинен співпадати з форматом сигналу ЗЕ. Тобто, в аналогових САР ці вузли повинні представляти фізичну величину в тому ж масштабі, що і прийнятий для ЗЕ – наприклад, ті ж 10 мВ/град для розглянутого вище прикладу. Наприклад: в якості датчика температури використовується термопара типу ТХА (детально термопари і інші датчики розглядаються в розділі 1.7). Ця термопара розвиває ЕРС близько 41 мкВ/°С, тому для приведення рівня сигналу зворотного зв'язку до прийнятого масштабу (10 мВ/град) її сигнал необхідно підсилити (нормалізувати). Коефіцієнт підсилення НП повинен дорівнюватись 10 мВ/град / 41 мкВ/град = 10000 мкВ/град / 41 мкВ/град = 243,9. При виконанні цих умов сигнали завдавання і зворотного зв'язку матимуть однакові рівні, тобто їх можна порівнювати.
Аналогічним чином повинні співпадати і формати сигналів в цифрових САР.
3. Елемент порівняння (ЕП) виробляє сигнал різниці X = Xзавд – Xзз, який називається розузгодженням. Величина розузгодження може бути як позитивною, так і негативною. Сигнал розузгодження являється основною дією, що управляє, для САР.
4. Регулятор (Р) підсилює сигнал розузгодження і обробляє його по деякому закону. Від типу регулятора і його настройки вирішальним чином залежать всі характеристики САР. Вихідний сигнал регулятора управляє виконавчим механізмом (ВМ).
5. Виконавчий механізм (ВМ) під впливом сигналу регулятора управляє регулюючим органом (РО).
6. Регулюючий орган (РО) здійснює безпосереднє керування потоком енергії в об'єкт регулювання (ОР). Наприклад, в газопроводі топки печі встановлена засувка з електричним приводом. Власне засувка – регулюючий орган, а електродвигун, що переміщає засувку – виконавчий механізм (керування двигуном, як вказувалося раніше, здійснює регулятор).
7. Об'єкт регулювання (ОР) – піч, механічна система і т.п., тобто, об'єкт, параметри якого підлягають контролю і регулюванню.
Виконавчий механізм спільно з регулюючим органом і об'єктом регулювання утворюють силовий канал САР, а вся решта елементів – інформаційний канал, який в свою чергу має прямий канал і канал зворотного зв'язку.