

1.Характеристика методов настройки регуляторов (традиционный по характеристикам отдельных элементов системы регулирования и адаптивный с оценкой работы аср).
а) Традиционный по динамическим харарактеристикам объекта.
(разомкнутая цепь действий)

Недостатки: применяется аппроксимация – есть погрешность. При расчете, применяются формулы более низкого порядка, чем на самом деле – есть погрешность. Установка параметров может отличатся от того что есть на самом деле- это связано с техникой. Поведение может отличатся от того, что получено при расчетах Дополнительные погрешности от несовершенства ИМ.
Преимущество: простота и удобство алгоритма.
б )
Адаптивный метод
)
Адаптивный метод
1 – Вкл. АСР ( при начальных параметрах)
2 – Установка параметров очередного шага
3 – Оценка текущих характеристик действующей системы
4 – Проверка выполненных требований к системе
5 – Расчет новых значений параметров настройки.
Достоинства: системный подход, учитывание ошибок в настройке. Неидеальности отдельных элементов проявляется и учитывается в оценке характеристики системы. Позволяет учесть отдельные погрешности на отдельных этапах.
Недостатки: необходимость обеспечения сходимости такого алгоритма, т.к. замкнутый контур. Продолжительность выполнения повышается.
2.Техническая реализация автоматизированной настройки регуляторов. Критерии оптимальности настройки аср: исходные и косвенные (с контролем характерных точек кчх).
Техническая реализация:
 I.
Адаптированные настройки по h(t)з.с.
I.
Адаптированные настройки по h(t)з.с.
→  (To,
ψ) →Wмодел.
З.С.(iω)
→Wоб→{Кп,
Tи}к+1
(To,
ψ) →Wмодел.
З.С.(iω)
→Wоб→{Кп,
Tи}к+1
Переход (To, ψ) →Wмодел. З.С.(iω) выполнить сложно
Недостаток: трудно применять при сложной форме процессов. Влияние помех (υ(t))
Частотный метод адаптивных настроек АСР
С использованием генератора синусоидальных
колебаний
использованием генератора синусоидальных
колебаний

Хг = А2 * sin(ωo; t)
y(t) = Ay * sin(ωot + φy)
![]()
![]()
Далее оценка характеристик модели объекта по характеристикам З.С.
Исходные
критерия оптимальности:
Косвенные критерии оптимальности в виде требований к КЧХ З.С.

КЧХ З.С. → φзс (ω, Кп, Tи) = φзс* (1)
Rзс (ω, Кп, Tи) = Rзс* (2)
ωTи = (ωTи)*, где ω=2π/T
В ыражения
(1) и (2) определяют положение вектора
системы приω=ωрез
ыражения
(1) и (2) определяют положение вектора
системы приω=ωрез
М – частотный показатель колебательности
Достаточно обеспечить в области Мдоп расчетное значение для устойчивости
3.Структура и алгоритм автоматизированной настройки аср по косвенным показателям в режиме автоколебаний с релейным элементом и фазосдвигающим фильтром (на базе протаРа)
П
 – переключатель режимов: Работа и
Настройка
– переключатель режимов: Работа и
Настройка
![]() -
А зв.
-
А зв.
У равнение
гармонического баланса
равнение
гармонического баланса
![]() -
реле без гистерезиса
-
реле без гистерезиса
![]()
![]()
Если
![]() →
→![]()
Достоинства: на вход в регулятор приходит не ступенчатый сгнал, а более плавный от фильтра.
Колебания y(t) ближе к синусоидальному.
Недостатки: для определен. Tф требуется определенная
модель объекта.
4.Организация настройки АСР по косвенным показателям в режиме автоколебаний с релейным элементом с зоной гистерезиса (на базе приборов РС29 и РП-4)
П – переключатель режимов: Работа и
Настройка
– переключатель режимов: Работа и
Настройка
П
 ереводим
переключатель в режим «настройка»
ереводим
переключатель в режим «настройка»
Оцениваем
![]()
Или
![]()
![]()
![]() -
это ǽ π (возможно это d
)
-
это ǽ π (возможно это d
)

![]()
![]()
По Коб (ω*); φоб (ω*) при заданном Wμ (р) находим Кμ и Тμ
5.Организация настройки АСР по косвенным показателям (с контролем характерных точек КЧХ замкнутой системы) с применением ГСК.


![]()
![]()
![]()
![]()
Т ребования:
ребования:
![]() при ω = ωрез
(1-0.1)
при ω = ωрез
(1-0.1)
Wμ
(Kμ;
T1;
T2;
τ) ![]()
![]()
при ω = ωг
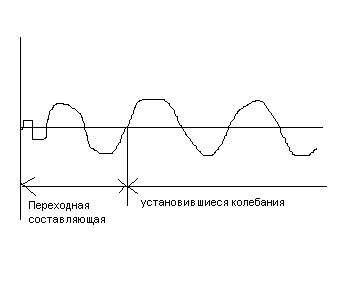
Н еобходимо
сокращение числа точек для сокращения
времени расчета настроек. Для оценки
КЧХ Нужно отбросить переходную
составляющую и анализировать только
установившиеся колебания.
еобходимо
сокращение числа точек для сокращения
времени расчета настроек. Для оценки
КЧХ Нужно отбросить переходную
составляющую и анализировать только
установившиеся колебания.
К недостаткам можно отнести заранее неизвестную ωрез
6. Вычисление нового приближения к оптимуму в процессе адаптивной настройки АСР по косвенным показателям (с контролем характерных точек КЧХ замкнутой системы) с применением ГСК.
Начальные условия оптимальности:
ψ = 0.9 →
 ,
где
,
где
 ,
,

I1 = min;

|
|
 1
-
1
-
![]()
2
-
![]()
3
-
![]()
![]()
![]()
![]()
Уравнение для расчета нового приближения
![]()
![]() →
→![]()
![]() или
или
![]()
7.Характеристика контроллеров Р-130. Разновидности моделей контроллеров. Состав комплекта.
Ремиконт Р-130 – это компактный малоканальный многофункциональный контроллер общепромышленного назначения. Эффективность применения Ремиконт Р-130 обеспечивается за счёт высокой надёжности реализуемых как простых, так и достаточно сложных функций управления небольшими агрегатами в АСУТП.
Ремиконт Р-130 предназначен для автоматического регулирования и логико-программного управления технологическими процессами в электротермической, энергетической, металлургической, химической, нефте- и газоперерабатывающей, стекольной, пищевой и других отраслях промышленности.
Приборостроительная промышленность выпускает РЕМИКОНТ Р-130 двух модификаций – регулирующий логический.
Регулирующая модель предназначена для решения задач автоматического регулирования технологических параметров.
Логическая модель реализует логический режим программного пошагового управления.
Регулирующая модификация позволяет реализовывать локальное, каскадное, программное, супервизорное, многосвязное регулирование. Архитектура этой модели обеспечивает возможность вручную и автоматически включать, отключать, переключать и реконфигурировать контуры регулирования, причём все эти операции выполняются безударно независимо от сложности структуры. В сочетании с обработкой аналоговых сигналов эта модель позволяет выполнять также логические преобразования сигналов и вырабатывать не только аналоговые или импульсные, но и дискретные команды управления.
Логическая модель РЕМИКОНТ Р-130 формирует программу шагового управления с анализом условия выполнения каждого шага, заданием контрольного времени на каждом шаге и условным или безусловным переходом программы к заданному шагу. В сочетании с обработкой дискретных сигналов эта модель позволяет выполнять также разнообразные функциональные преобразования аналоговых сигналов и вырабатывать не только дискретные,но и аналоговые управляющие сигналы.
Основным элементом Р-130 является блок контроллера БК-1, на лицевой панели которого расположены органы управления и контроля, позволяющие вручную изменять режим работы, устанавливать задание, управлять ходом выполнения программы, вручную управлять исполнительными устройствами, контролировать сигналы и получать сообщения об ошибках. Стандартные аналоговые и дискретные датчики и исполнительные устройства подключаются к Р-130 с помощью индивидуальных кабельных связей. Обработка сигналов внутри контроллера выполняется в цифровой форме. Блоки как регулирующей, так и логической модели могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, при этом для такого объединения никаких доп устройств не требуется. Обмен информации между контроллерами осуществляется по двухпроводной линии. С помощью блока «Шлюз» входящего в состав Р-130, сеть «Транзит» может взаимодействовать с любым внешним абонентом, например ПЭВМ, имеющим соответствующий интерфейс. Микропроцессорный контроллер является программируемым устройством. Однако каких-либо особых знаний программирования от оператора не требуется. Процесс программирования сводится к тому, что путем последовательного нажатия нескольких клавиш из библиотеки, «зашитой» в постоянное запоминающее устройство (ПЗУ), извлекаются нужные алгоритмы, которые затем объединяются в системы заданной конфигурации и в них устанавливаются требуемые параметры настройки. Введённая инфа может сохраняться в ПЗУ при отключении сетевого питания от встроенной гальванической батареи. Для обеспечения нормальной работы блока контроллера БК-1, преобразующего и обрабатывающего аналоговую и дискретную информацию в цифровой форме, используется ряд доп блоков. Эти блоки предназначены для усиления сигналов идущих от датчиков естественных сигналов и преобразования их в унифицированные, а также формирования дискретных сигналов напряжением 220 В, организации внешних переключений и блокировок. Ремиконт Р-130 снабжён средствами самодиагностики, сигнализации и идентификации неисправностей, в том числе при отказе аппаратуры или при выходе сигналов за допустимые границы.
Состав : БК-1 (блок контроллера) ; ПН-1 (пульт настройки для технологического программирования блока контроллера) ; РН-1 (резисторы нормирующие); МБС (межблочный соединитель) ; КБС – 0 (клеммно-блочный соединитель для размножения общих точек) ; КБС-1 (клеммно-блочный соединитель для реализации приборных целей БК-1 и подключения нагрузки к блокам БУТ-1, БУС-10 и БУМ-10) ; КБС-2 (клеммно-блочный соединитель для дискретных цепей ввода-вывода БК-1 и БПР-10) ; КБС-3 (клеммно-блочный соединитель для аналоговых цепей ввода-вывода БК-1) ; БП-1 (блок питания) ; БУТ-10 (блок усилителей сигналов низкого уровня) ; БУС-10 (блок усилителей сигналов низкого уровня резистивных датчиков(термосопротивлений)) ; БУМ (блок усилителей мощности) ; БПР-10 (блок переключений) ; БСТ-1 (блок стирания) ; БШ-1 (блок шлюза).