

13.8. Расчет механизмов автоматической смены инструментов
Движения механизмов смены инструментов. Инструментальные магазины револьверные головки, автооператоры, кантователи совершают вращательное движение. Каретки, промежуточные носители, автооператоры при выводе и вводе инструмента в гнездо перемещаются поступательно. Цикл любого движения включает разгон, движение с постоянной скоростью, торможение. Разгон и торможение сопровождаются динамическими нагрузками, ударами, колебаниями в механизмах, составляют до 40 % общего времени и в основном определяют долговечность механизмов.
Узлы, входящие в состав механизмов автоматической смены инструментов, приводятся в движение от общего двигателя или от индивидуальных приводов (электрических, гидравлических, пневматических). В первом случае кинематические цепи состоят из многочисленных механических передач и преобразователей движения, имеют низкую жесткость. Во втором случае цепи короткие, но система управления усложняется.
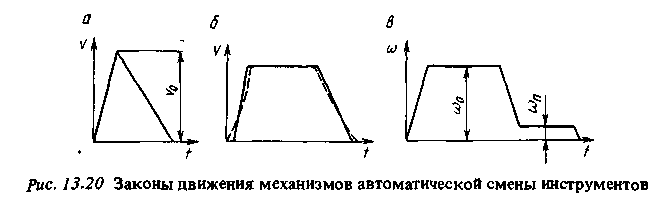
Режимы поступательного движения механизмов. Оптимальный по критерию быстродействия треугольный закон (рис. 13.20, а) используют редко, так как вследствие мгновенного изменения знака ускорения при переходе к торможению имеют место перераспределение зазоров в механизмах и вы\званные им удары. Часто используют закон изменения скорости, близкий к трапецеидальному (рис. 13.20, б), которому соответствуют плавные изменения ускорения. При этом продолжительность отдельного движения
где s
—
перемещение исполнительного органа;
ар
—
ускорение исполнительного органа
при разгоне;![]() его
ускорение при торможении; отношение
его
ускорение при торможении; отношение![]() времени
времени
![]() движения
с установившейся скоростью к
продолжительности I
отдельного
движения.
движения
с установившейся скоростью к
продолжительности I
отдельного
движения.
Оптимальная скорость установившегося движения зависит от пути перемещения исполнительного органа:
![]()
где к = 0,5...0,6.
При малых ходах высокие скорости нецелесообразны, так как не дают заметного выигрыша времени, но приводят к резкому повышению мощности привода.
Узел
подходит к упору надежно, но без сильного
удара в том случае, когда его скорость
находится в интервале от 0,02...0,04 до 0,2
м/с. Минимальная скорость узла
вычисляется с учетом возможных отклонений
приведенной массы систем![]() на
на
![]() ,
номинальной скорости подхода к упору
,
номинальной скорости подхода к упору![]() на
на![]() силы сопротивления
силы сопротивления
![]() на
на![]()
Наибольшая
скорость узла при подходе к упору не
должна вызывать сильного удара между
ними. Для автооператоров загрузочных
устройств рекомендуется![]()
Для предотвращения колебаний в механизмах при переходных процессах (разгоне, торможении) и малых ходах (0,15...03 м) ускорение не должно превышать 5...6 м/с2, при больших ходах (0,7...0,8м) допускаемое ускорение может быть повышено до 10... 12 м/с2.
Номинальное время торможения узла при равнозамедленном движении
![]()
где Р — действующая на узел сила.
Режимы
вращательного движения механизмов.
Инструментальные магазины совершают
вращательное движение со ступенчато
изменяющейся скоростью (рис. 13.20, в).
Время поворота на i
позиций
слагается из времен разгона, равномерного
вращения с угловой скоростью
![]() ,
торможения и позиционирования с
угловой скоростью
,
торможения и позиционирования с
угловой скоростью![]()
Для
движения с одинаковым ускорением е при
разгоне и торможении рациональным
является отношение![]() При
обычно используемых ускорениях
При
обычно используемых ускорениях
![]() рациональная
угловая скорость равномерного движения
рациональная
угловая скорость равномерного движения![]()
Минимальная
угловая скорость вращательного движения
узла определяется с учетом возможных
отклонений момента сопротивления
![]() на
на![]() приведенного момента инерции / на А/ и
номинальной скорости подхода к упору
приведенного момента инерции / на А/ и
номинальной скорости подхода к упору![]() на
на![]()
С учетом того что инструментальный магазин поворачивается на разное число позиций, приведенное время движения при разгоне и торможении с одинаковым ускорением
![]() (13.8)
(13.8)
где п
— общее
число позиций в магазине; рг
—
вероятность поворота на i
позиций;
Т.—
время поворота на i
позиций;![]() ускорение
при разгоне и торможении; f(p,
n)
—
функция, характеризующая закон
распределения ходов пои повороте на
разное число позиций (для симметричных
распределений
ускорение
при разгоне и торможении; f(p,
n)
—
функция, характеризующая закон
распределения ходов пои повороте на
разное число позиций (для симметричных
распределений
![]() угловая
скорость равномерного вращения при
повороте) ;
угловая
скорость равномерного вращения при
повороте) ;![]() угловая
скорость при позиционировании) ;
угловая
скорость при позиционировании) ;![]() угол
поворота при движении со скоростью
угол
поворота при движении со скоростью![]()
![]() угол поворота на одну позицию).
угол поворота на одну позицию).
В зависимости (13.8) первое слагаемое определяет время равномерного движения, второе — время переходных процессов и фиксации.