

12. Направляющие качения и комбинированные
12.1. Свойства направляющих качения
Для направляющих качения характерны низкая сила трения (10...40 Н) и ее независимость от скорости рабочего органа, благодаря чему достигаются равномерность медленных движений, снижение мощности привода подачи и высокая точность позиционирования (зона несувствительности направляющих качения по сравнению с парой трения чугун-чугун снижается в 10— 12 раз). Значительно меньшая, чем в направляющих с гидростатической смазкой, переориентация рабочего органа обусловливается только податливостью направляющих, которая значительно ниже податливости направляющих других типов. Для направляющих качения характерна высокая долговечность, так как при хорошей защите их износ на порядок ниже, чем износ направляющих полужидкостного трения. К недостаткам направляющих качения относятся низкое демпфирование в направлении движения при малых скоростях движения и сравнительно высокая стоимость.
Направляющие качения применяют в обрабатывающих центрах сверлильно-фрезерно-расточной группы, станках с ЧПУ высокой точности малых и средних размеров, круглошлифовальных, бесцентрово-шлифовальных станках.
12.2. Направляющие без циркуляции тел качения
Конструкции направляющих. В конструкцию направляющих входят закаленные планки, прикрепляемые к столу и станине, тела качения (шарики или ролики), сепараторы, устройства для создания предварительного натяга и для защиты направляющих от загрязнений.
Направляющие без циркуляции тел качения применяются при небольшой длине хода узла (до 1 м).
Направляющие бывают незамкнутыми и замкнутыми. Отрыву подвижного узла, установленного на незамкнутых направляющих (рис 12.1,а, б),препятствуют его сила тяжести и вертикальная составляющая силы резания. Незамкнутые направляющие качения могут быть только горизонтальными. Замкнутые направляющие (рис. 12.1, в—е) сложнее и дороже незамкнутых, однако благодаря создаваемому натягу обладают высокой точностью и жесткостью. Они могут быть не только горизонтальными, но и вертикальными, и наклонными.
В конструкциях направляющих качения используются поверхности тех же форм, что и в направляющих скольжения. Применение шариков или роликов дает большое число их исполнений.
Шариковые направляющие со встречными призмами (рис. 12.1, в) отличаются простотой, конструкции, однако не могут воспринимать больших нагрузок и легко повреждаются в результате перетяжки элементов, регулирующих натяг. Направляющие типа "ласточкин хвост" (рис. 12.1, г) по сравнению с другими имеют более высокую жесткость, хорошо регулируются, но отличаются сложностью в изготовлении; применяются при малой и средней маcсе подвижного узла. Прямоугольные роликовые направляющие (рис. 12.1,<3) просты по конструкции и в изготовлении, имеют высокую жесткость в горизонтальной плоскости, но недостаточную при работе планок на отрыв. Недостатком их являются и большие габариты. Применяются при средней массе подвижного узла и большом опрокидывающем моменте.

Ролики в призматических направляющих (рис. 12.1, е) из-за малого диаметра могут проскальзывать, что приводит к повышенной силе трения. На работоспособности направляющих сильно сказываются погрешности углов призм.
Шариковые или роликовые направляющие выбирают в зависимости от нагрузки. Для роликовых направляющих допускаемая нагрузка в 20—30 раз больше, чем для шариковых. При больших нагрузках используются направляющие в виде накладных планок из закаленной цементируемой стали 20Х, а при малых— как стальные, так и чугунные.
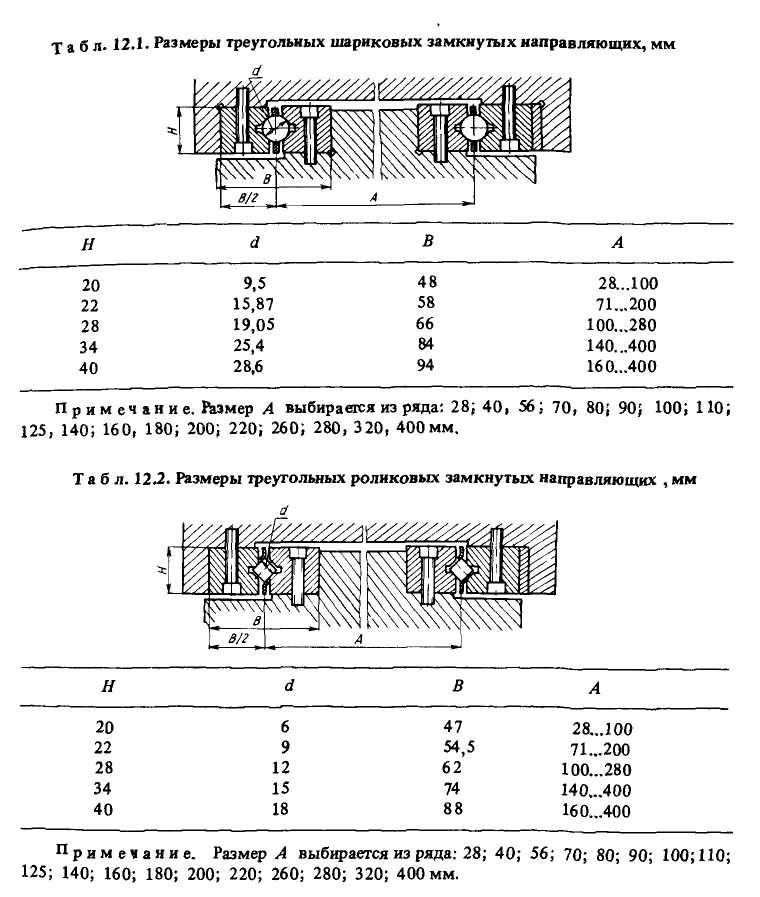
В качестве сепараторов применяются штампованные стальные пластины с прямоугольными (рис.12.2) или круглыми гнездами, стальные составные пластины, а также роликовые цепи. Размеры направляющих приведены в табл. 12.1 и 12.2.
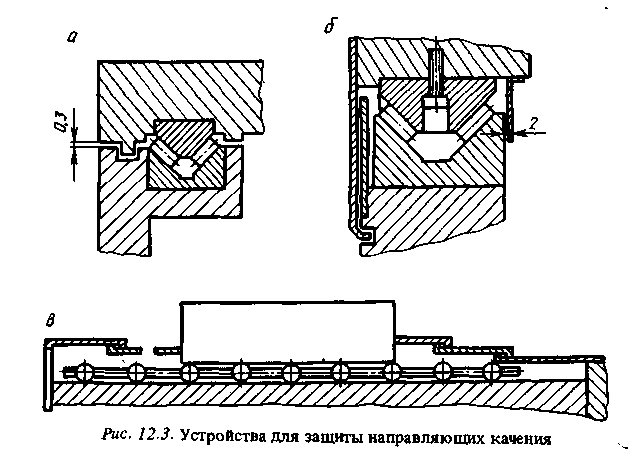
Направляющие смазываются пластичным смазочным материалом масляным туманом. Для защиты от загрязнений применяются лабиринтные уплотнения, расположенные вдоль них(рис. 12.3, а, б). Со стороны торцов к столу прикрепляют щитки и стальные ленты(рис.12.3, в).
Конструирование и расчет направляющих. Сначала определяют диаметр и число тел качения, исходя из зависимостей между ним и давлением в контакте, жесткостью и точностью направляющих. Затем принятые параметры проверяют расчетами.
При увеличении диаметра шариков давление в контакте уменьшается, жесткость и износостойкость направляющих возрастают. С увеличением диаметра роликов жесткость не изменяется, но износостойкость улучшается. Поэтому рекомендуется применять тела качения большого диаметра — 8... 10 мм, а иногда и до 25 мм. Игольчатые направляющие пригодны при малых нагрузках и невысоких требованиях к их жесткости.
С
увеличением числа тел качения z
снижается
нагрузка на одно тело, повышается
жесткость направляющих. Но при большом
числе многие из них вследствие погрешностей
изготовления оказываются ненагруженными
или недогруженными. Равномерность
нагружения шариков считается
удовлетворительной, если начальная
нагрузка, на один шарик диаметра d
(от
силы тяжести G
подвижного
узла) составляет
![]() .
Ролики нагружены, относительно
равномерно, если нагрузка на единицу
их длины не менее 4 Н/мм. Другими словами,
для шариковых и роликовых направляющих
должны соблюдаться соответствующие
условия:
.
Ролики нагружены, относительно
равномерно, если нагрузка на единицу
их длины не менее 4 Н/мм. Другими словами,
для шариковых и роликовых направляющих
должны соблюдаться соответствующие
условия:
где b —длина ролика,мм; G-в Н; d —в мм.
В то же время число тел качения в одном ряду должно быть больше 12—16, так как при меньшем их количестве точность движения по направляющим снижается

После того как с учетом приведенных рекомендаций будет разработана конструкция направляющих, принятые конструктивные параметры необходимо проверить расчетом. Для определения наибольшей нагрузки на тело качения направляющие качения условно заменяют направляющими скольжения и по методике, применяемой при расчете направляющих скольжения, строят эпюру давления в контакте (рис. 12.4). Наибольшая расчетная нагрузка на шарик
![]()
на ролик
![]()
где d — диаметр шарика; t — шаг расположения шариков или роликов; ртах- максимальное давление в контакте; b- длина ролика.
Допускаемая по контактным напряжениям нагрузка на шарик
![]()
на ролик
![]()
где к - условное напряжение, Н/см2 (табл. 12.3); d и b-в см.
Упругие перемещения в направляющих качения определяют с учетом зависимостей, описывающих контактные деформации при применении шариков и роликов:
![]()
где Сш и Ср — коэффициенты податливости [28]; Рш –нагрузка на шарик; q- нагрузка, приходящаяся на единицу длины ролика.

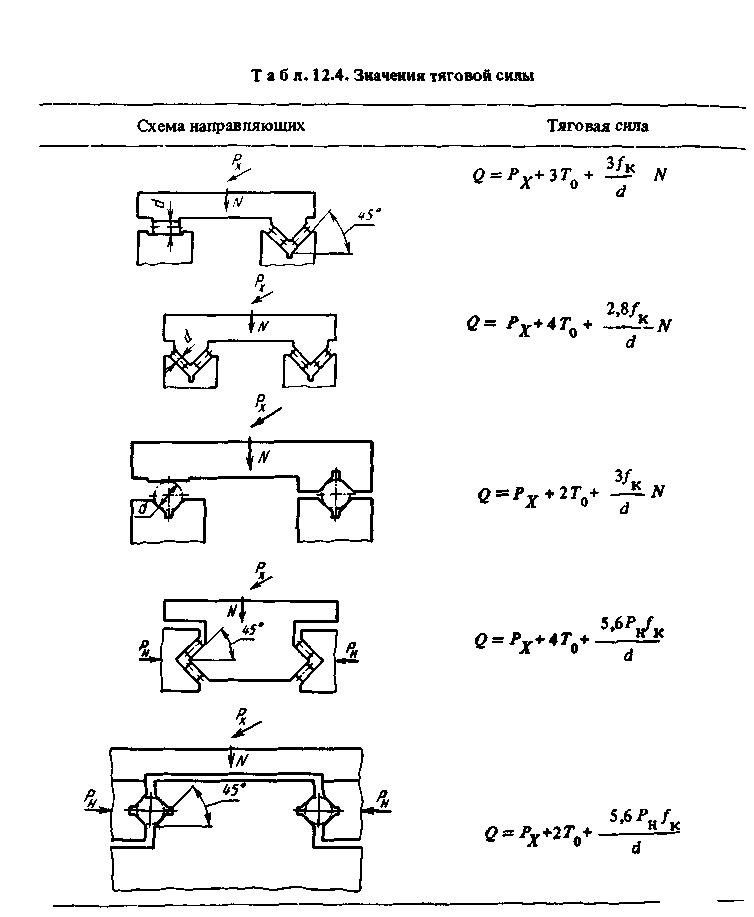
Тяговая сила в приводе подачи станка с направляющими качения может быть определена по зависимости
![]()
где
Px-
составляющая силы резания, Н; п
—число
граней направляющих; То-
начальная
сила трения на одной грани направляющих
(при отсутствии внешней нагрузки): T0
=
4...5 Н; /к—-
коэффициент трения качения; для
направляющих из стали![]() для
направляющих из чугуна
для
направляющих из чугуна![]() 0,0025 см; ri—радиус
тел качения, контактирующих с i
-й
гранью направляющих, см; Рi
- реакция
i
-й грани, Н.
0,0025 см; ri—радиус
тел качения, контактирующих с i
-й
гранью направляющих, см; Рi
- реакция
i
-й грани, Н.
Тяговую
силу можно определить по упрощенным
зависимостям с учетом только нормальных
сил, приложенных в плоскости симметрии,
силы Рх
и
силы предварительного натяга Рн
(табл.
12.4) . При этом![]() где рz
— составляющая
силы резания, Н; G1
— сила тяжести стола, Н; G2
— сила
тяжести изделия, Н.
где рz
— составляющая
силы резания, Н; G1
— сила тяжести стола, Н; G2
— сила
тяжести изделия, Н.