9.3. Элементы исполнительного механизма приводов
Состав исполнительного механизма. В состав исполнительного механизма электромеханического привода подачи входят соединительная муфта 1 (рис. 9.2), тяговое устройство 4, его опоры 3. В приводе может быть использован простой редуктор 2, предназначенный для повышения момента на тяговом устройстве или для реализации компоновочного решения.

Соединительные муфты. Вал электродвигателя соединяют с редуктором или тяговым механизмом с помощью упругой беззазорной муфты, применение которой позволяет допустить их относительное смещение, снижает амплитуду изменения крутящего момента при разгоне и торможении привода, предохраняет ходовой винт от нагрева теплотой, выделяемой электродвигателем, снижает колебания в приводе. Соединительные муфты оказывают существенное влияние на точность и жесткость привода и к ним предъявляются повышенные требования в отношении крутильной жесткости, нагрузочной способности, долговечности.
Муфта с взаимно перпендикулярными радиальными пазами, образующими перемычки и упругие мембраны (табл. 9.1) , передает вращающий момент разжимными упругими коническими кольцами или коническими втулками.

Полужесткая муфта с гибким диском (рис. 93) имеет высокую крутильную жесткость, позволяет компенсировать угловые и радиальные смещения валов. Компенсирующие муфты (рис. 9.4, табл. 9.2) предназначены для безлюфтового соединения винтов с электродвигателями, когда допускается взаимное радиальное смещение их осей до 0,2 мм, угловое — до 30' . Обозначения в таблице: М - номинальный вращающий момент, передаваемый муфтой; d — диаметр посадочных отверстий; / — их длина; D—наружный диаметр муфты; L — ее длина; С - расстояние между торцами соединяемых валов; jφ — крутильная (угловая) жесткость муфты; jr — радиальная жесткость муфты; М - наибольший вращающий момент, передаваемый муфтой в течение коротких интервалов времени (до 2 с). Муфты допускают наибольшую частоту вращения до 2500 об/мин.

Сильфонная муфта (рис. 9.5) компенсирует угловые, радиальные и осевые смещения валов, имеет высокую жесткость при передаче вращающего момента. На рис, 9.6 показана сильфонная муфта германской фирмы Bosch, позволяющая компенсировать значительные радиальные, угловые и осевые смещения валов. Размеры ее втулок с конусом, предназначенным для передачи момента с помощью трения, приведены в табл.9.3, а параметры муфты — в табл. 9.4.
Упругую муфту выбирают по вращающему моменту и крутильной жесткости. Собственную частоту (с"1) крутильных колебаний механической части привода определяет по зависимости
 (9.1)
(9.1)
где
![]() крутильная
жесткость муфты, Н-м/рад;
крутильная
жесткость муфты, Н-м/рад;![]() крутильная
жесткость ходового винта, Н-м/рад; I
— момент
инерции ротора двигателя, кг-м2;
I
с
— приведенный
к валу двигателя момент инерции стола,
кгм2.
крутильная
жесткость ходового винта, Н-м/рад; I
— момент
инерции ротора двигателя, кг-м2;
I
с
— приведенный
к валу двигателя момент инерции стола,
кгм2.
Крутильная жесткость ходового винта
![]()
где
![]() номинальный
диаметр ходового винта,
м; Е
—модуль
упругости материала
винта, Па;
номинальный
диаметр ходового винта,
м; Е
—модуль
упругости материала
винта, Па;
![]() коэффициент
Пуассона:
коэффициент
Пуассона:![]() /
— максимальное
расстояние
между гайкой и опорой винта, м»
/
— максимальное
расстояние
между гайкой и опорой винта, м»


Задавшись собственной частотой механических колебаний привода fc = 30...75 Гц, необходимой для запаса его устойчивости, по зависимости (9.1) находят требуемую крутильную жесткость муфты. Подбирают такую муфту, крутильная жесткость которой не ниже требуемой.
Соединения с коническими кольцами. Для повышения точности и жесткости цепи привода вместо шпоночных применяют соединения с коническими кольцами (рис. 9.7) . Сближая кольца в осевом направлении с помощью гайки или стяжных винтов и нажимного кольца, создают беззазорное фрикционное соединение, способное передавать необходимый вращающий момент. Угол конусности колец составляет 12,5...17е , их твердость - 45...55 HRC3. Когда вал имеет диаметр до 40 мм, для нажима применяют гайку, при больших диаметрах — нажимное кольцо. Большой вращающий момент можно передать с помощью нескольких рядов колец (до четырех) .
Наибольший вращающий момент (Н-м), передаваемый первым рядом колец,
![]()
где d
—
диаметр вала, мм; / — ширина кольца,
мм;![]() коэффициент
трения на поверхностях контакта:
коэффициент
трения на поверхностях контакта:![]() р
—
допускаемое давление в контакте:
р
—
допускаемое давление в контакте:![]()
Момент, передаваемый вторым рядом колец, равен 50 %, третьим — 25 %, четвертым — 12,5 % момента, передаваемого первым рядом,
Осевая сила (Н) .необходимая для затяжки соединения,
![]()
где а — угол конусности колец.
Основные параметры соединений приведены в табл.9.5.
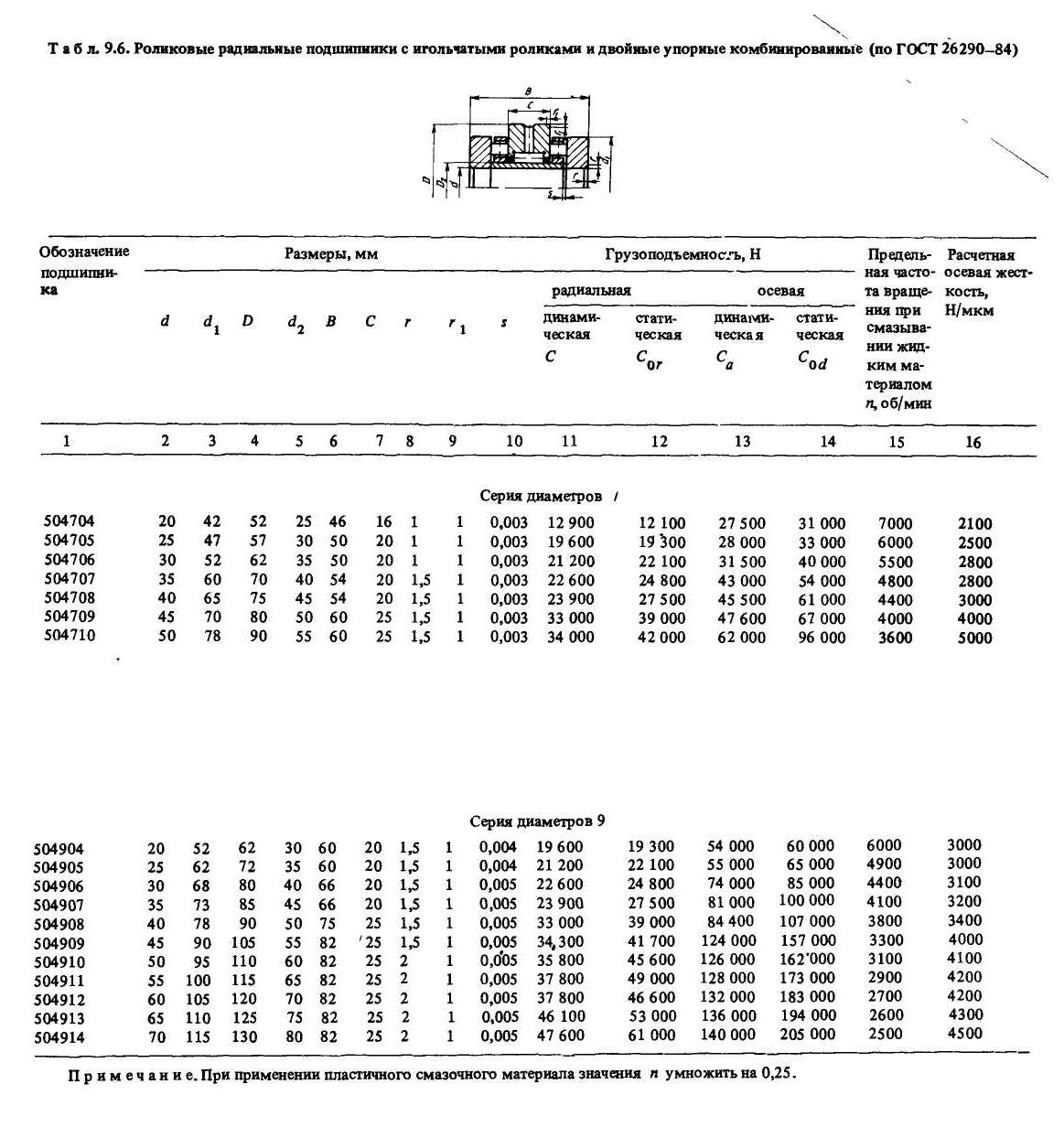
Подшипники
для опор ходового винта.
К
опорам ходового винта передачи винт—гайка
качения предъявляются следующие
требования: достаточная осевая
жесткость при умеренном предварительном
натяге; малое осевое биение; низкие по
сравнению с шарико-винтовым механизмом
момент холостого хода и тепловыделение.
Этим требованиям в наибольшей степени
отвечают упорные комбинированные
роликовые подшипники типа 504000 (табл.
9.6) . Они воспринимают как осевую, так
и радиальную нагрузку и поставляются
с заданным гарантированным натягом.
Их осевая жесткость в 2—3 раза выше
жесткости обычных упорных шариковых
подшипников. В состав упорного
комбинированного роликового подшипника
входят два упорных и радиальный роликовый
подшипники. Осевой натяг ограничивается
проставочной втулкой, радиальный
зазор создается подбором комплекта
роликов. При вращении винта в средней
части дорожек происходит качение
роликов, по краям — проскальзывание.
Для улучшения работы подшипники делают
с двумя рядами роликов, перемещающихся
с разными скоростями.