6.10. Расчет жесткости опор шпинделя
Общие сведения о жесткости опор. При расчете на жесткость шпиндель рассматривается как балка ступенчато-переменного сечения на податливых точечных опорах. Считается, что радиальные подшипники обладают только радиальной жесткостью, радиально-упорные - радиальной, осевой и угловой, упорно-радиальные — осевой и угловой жесткостью. Значения жесткости подшипников определяют по справочникам. Принимают, что жесткость опор с предварительным натягом не зависит от рабочей нагрузки, но заметно уменьшается при значительном повышении частоты вращения шпинделя.
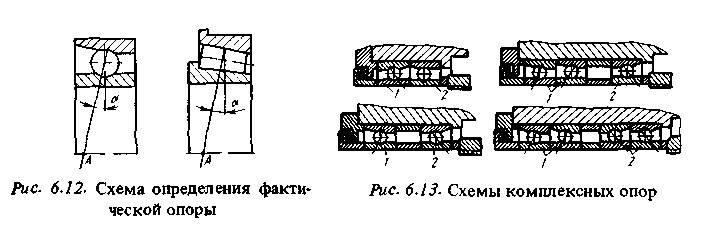
Расчетные радиальные опоры шпинделя при применении радиальных подшипников располагаются посредине ширины подшипников. Расчетные радиальные опоры шпинделя, установленного на радиально-упорных шариковых и конических роликовых подшипниках, находят с учетом угла контакта тел качения и колец подшипников. Считается, что такая опора фактически расположена в точках пересечения оси шпинделя с линией, проходящей через ось шарика или середину длины ролика под углом, равным углу контакта в подшипнике (рис. 6.12). Расчетные угловые опоры шпинделя при применении упорно-радиальных и сдвоенных упорных подшипников находятся на оси шпинделя посредине ширины подшипника.
Жесткость шпиндельного узла определяют с учетом жесткости его опор. Если опора состоит из одного подшипника, жесткость опоры равна его жесткости. Если в опору входит несколько подшипников, определять жесткость шпиндельного узла можно двумя путями: 1) принимать каждый подшипник в качестве самостоятельной опоры, обладающей жесткостью подшипника, и рассматривать шпиндель как многоопорную статически неопределимую балку; 2) все подшипники, находящиеся в опоре, считать образующими одну комплексную опору с жесткостью, зависящей от ее компоновочной схемы и жесткости подшипников.
Жесткость
опоры с шариковыми радиально-упорными
подшипниками [
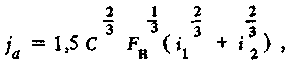
49]. Комплексную опору, состоящую из
нескольких подшипников, представляют
в виде двух условных опор (рис. 6.13): 1
— находящейся
ближе к переднему торцу шпинделя, 2
— находящейся дальше от него. Сдвоенные
подшипники, установленные в одной
условной опоре по схеме "тандем",
считают одним двухрядным. Число
подшипников в опорах / и 2
обозначают![]() и
и![]()
В
зависимости от способа создания
предварительного натяга задаются силой
натяга F
или
общей деформацией (натягом) опоры![]()
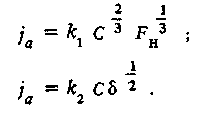
Осевая жесткость комплексной опоры (Н/мм)
где
F — сила натяга, Н (см. табл. 6.15); z — число тел качения в подшипнике;
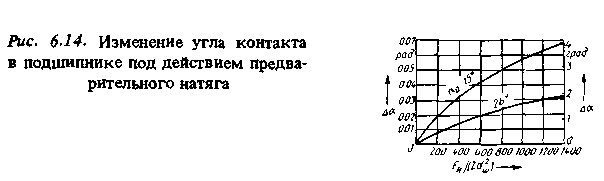
а - фактический угол контакта в подшипнике, изменяющийся под действием предварительного натяга (рис. 6.14);
dm - диаметр шарика, мм.
Для комплексных опор, изображенных на рис. 6.13,
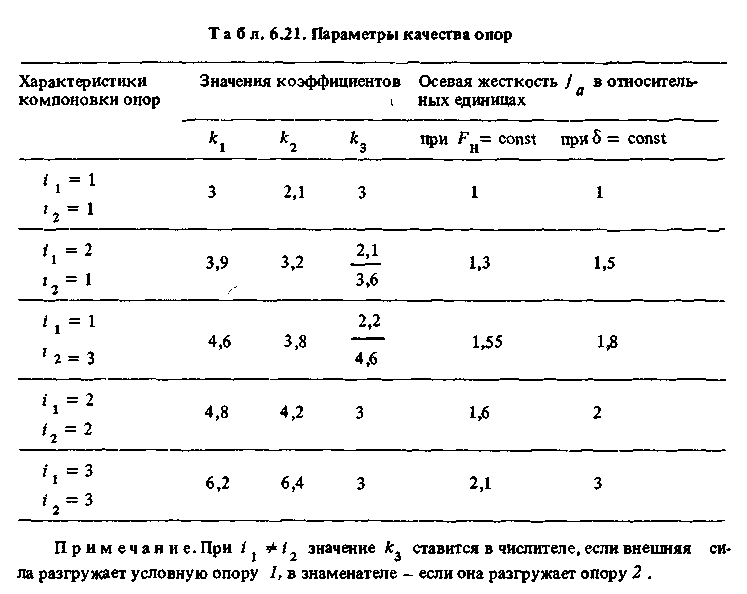
Коэффициенты к1 и к2 и осевая жесткость опор в относительных единицах приведены в табл. 6.21.
Радиальная жесткость условной опоры может быть вычислена по формуле
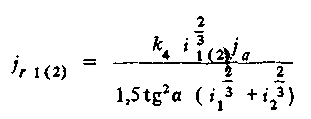
Коэффициент к4 характеризует распределение нагрузки между телами качения и зависит от соотношения между силой натяга и радиальной нагрузкой:

Для
шарикоподшипников типов 36000К и 36000У
радиальная жесткость
![]() , а для подшипников типов 46000К и 46000У
, а для подшипников типов 46000К и 46000У![]() 2,1)
2,1)![]() ■
■
Внешняя осевая сила, при которой натяг одной из условных комплексных опор полностью снимается, определяется по зависимости
![]()
Или
![]()
Коэффициент
к3
приведен
в табл. 6.21. Для симметричных опор![]()
![]()
Жесткость двухрядного упорно-радиального подшипника с углом контакта а = 60°. Осевая жесткость подшипника (Н/мм)
![]()
где к = 0,8...0,9 — коэффициент, учитывающий погрешности изготовления подшипника.
Благодаря высокой угловой жесткости упорно-радиальный подшипник создает значительный защемляющий момент. Угловая жесткость (Н-мм/рад) этого подшипника
![]()
где М
— защемляющий
момент, действующий на шпиндель, Н<
мм;![]() угол
наклона упругой оси шпинделя в опоре,
рад; d
и
D
— внутренний
и наружный диаметры подшипника, мм.
угол
наклона упругой оси шпинделя в опоре,
рад; d
и
D
— внутренний
и наружный диаметры подшипника, мм.
Жесткость
однорядных конических подшипников. Эти
подшипники работают с небольшим
зазором или натягом при совместном
действии радиальной F
и
осевой
F
нагрузок.
Для опоры с натягом при
![]() радиальная жесткость
радиальная жесткость
![]()
где / — эффективная длина ролика, мм; а — угол наклона оси роликов.
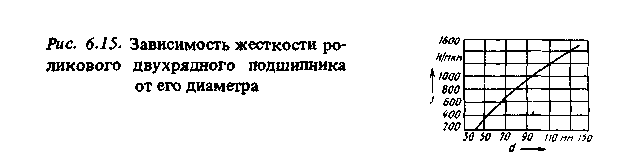
Жесткость роликового двухрядного подшипника с короткими цилиндрическими, роликами зависит от его внутреннего диаметра (рис. 6.15).