

4.4. Приводы с частичным перекрытием ступеней частоты вращения
Если
диапазон регулирования привода нормальной
структуры больше расчетного, для его
уменьшения можно подкорректировать
структуру, создав частичное перекрытие
ступеней частоты вращения. Способ
состоит в уменьшении на![]() характеристики
последней 1-й
группы.
При этом общее число ступеней привода
уменьшается на
характеристики
последней 1-й
группы.
При этом общее число ступеней привода
уменьшается на![]() и
становится равным
и
становится равным
![]()
фактическая характеристика исправленной 1-й группы
![]()
а общий
диапазон регулирования привода
уменьшается в![]() раз.
раз.
Пример
2. Исправим
нормальную структуру, приведенную в
примере 1, путем уменьшения
на![]() характеристики
характеристики![]() последней
группы с целью получения перекрытия
ступеней частот вращения на последнем
валу, Фактическая характеристика
последней группы
последней
группы с целью получения перекрытия
ступеней частот вращения на последнем
валу, Фактическая характеристика
последней группы
![]() Фактическое
число ступеней частоты вращения на
последнем валу
Фактическое
число ступеней частоты вращения на
последнем валу![]() Структурная
сетка исправленной структуры приведена
на рис. 4.2, б.
Структурная
сетка исправленной структуры приведена
на рис. 4.2, б.

4.5. Приводы с выпадением ступеней частоты вращения
Если
в нормальной структуре диапазон
регулирования последней передачи больше
допустимого, структуру можно исправить
за счет выпадения частот вращения
на последнем валу. Для этого уменьшают
характеристику
![]() промежуточной 1-й групповой передачи,
создают перекрытие ее
промежуточной 1-й групповой передачи,
создают перекрытие ее
![]() -ступеней.
-ступеней.
Фактическое
число ступеней частоты вращения на
ведомых валах от
![]() до /-й передачи
до /-й передачи
![]()
Число выпавших ступеней частоты вращения
![]()
Пример
3.
Исправим нормальную структуру, приведенную
в примере 1, путем уменьшения на
![]() характеристики
характеристики![]() третьей
группы с целью получения структуры с
выпадением ступеней частот вращения.
При этом, фактическая характеристика
этой группы
третьей
группы с целью получения структуры с
выпадением ступеней частот вращения.
При этом, фактическая характеристика
этой группы![]() ,
число
,
число![]() ступеней
частот вращения на ведомом валу этой
передачи
ступеней
частот вращения на ведомом валу этой
передачи![]() ,
Фактическое число ступеней вращения
на последнем валу
,
Фактическое число ступеней вращения
на последнем валу![]() число
выпавших ступеней частоты вращения
число
выпавших ступеней частоты вращения![]() .
В структурной сетке структуры с четырьмя
выпавшими ступенями частоты вращения
(рис. 4.2, в) следует уменьшить диапазон
регулирования последней группы.
.
В структурной сетке структуры с четырьмя
выпавшими ступенями частоты вращения
(рис. 4.2, в) следует уменьшить диапазон
регулирования последней группы.
4.6. Приводы сложенной структуры
Сложенную структуру получают из двух или более определенным образом соединенных структур с последовательно включенными групповыми передачами. Одна из соединяемых структур называется основной, другие - дополнительными. Основная структура участвует в передаче на шпиндель всех ступеней частоты вращения, каждая дополнительная используется для передачи только части ступеней. Разработан ряд вариантов сложенных структур [ 90], один из них приведен на рис. 4.3, где 1.— основная структура с z° ступенями вращения, 2 — дополнительная структура с z ступенями вращения. Этот привод обеспечивает на шпинделе z = z° + z°z =z°(l+z') различных частот вращения.
Структурные формулу и сетку для основной структуры строят так же, как для привода с последовательно соединенными групповыми передачами. Характеристика первой группы дополнительной структуры равна числу ступеней частоты вращения основной структуры. Для каждой дополнительной структуры строят отдельную структурную сетку.
По сравнению с обычными структурами, образуемыми последовательным соединением групповых передач, сложенные структуры обладают рядом преимуществ. Они позволяют получать большое число ступеней частоты вращения и передавать высокие частоты с помощью коротких кинематических цепей. В приводах сложенной структуры потери мощности относительно невелики.
Пример 4. Пусть основная структура привода, изображенного на рис. 4.3, обеспечивает 6 ступеней частоты вращения, дополнительная - 4 ступени. Шпиндель станка с таким приводом имеет г = 6(1 + 4)=30 скоростей вращения. Одна из структурных формул привода:
![]()
Структурные сетки привода изображены на рис. 4.3, б, график частот вращения - на рис. 4.3,
в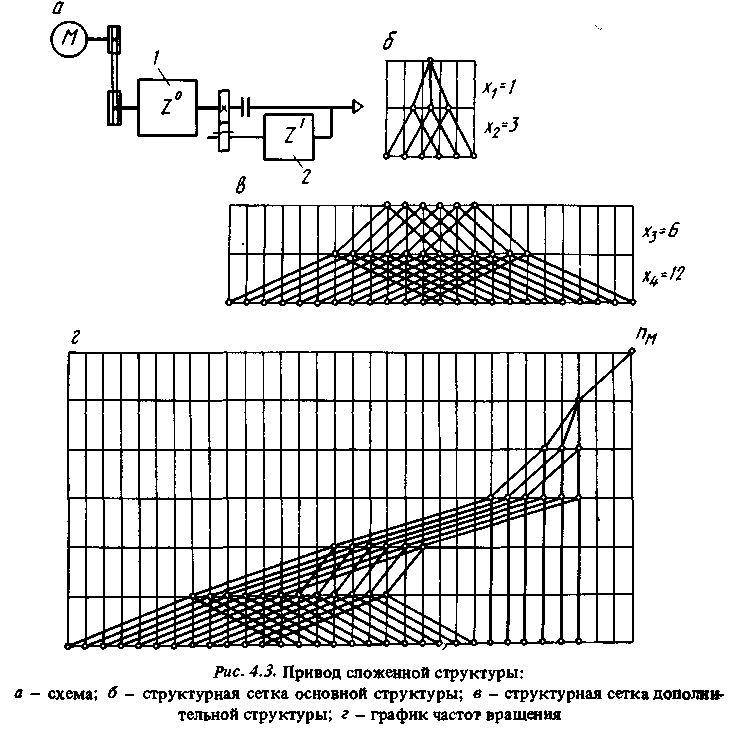
.