

3.5. Передачи зубчатым ремнем
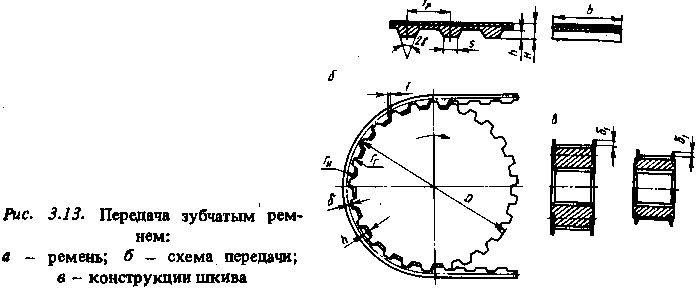
Характеристика передачи. Передача зубчатым ремнем (рис. 3,13) по сравнению с передачами клиновым или плоским ремнем при одинаковых габаритах позволяет передавать больший крутящий момент. Благодаря отсутствию скольжения она может быть использована для синхронизации вращения рабочих органов станка, манипулятора или промышленного робота. Передачу можно использовать при малых межцентровых расстояниях, повышенном значении передаточного числа (до 5...8). Допускается работа передачи в масле.
В то же время для передачи зубчатым ремнем характерны относительно низкий КПД, повышенный шум при частоте вращения шкивов более 1500 об/мин, большая масса зубчатого ремня, относительно сложная конструкция шкивов.
Нагрузка на ремень. Исходные данные: номинальная мощность Р, передаваемая ремнем, кВт; частота вращения меньшего шкива п , об/мин; передаточное отношение передачи i .
Предварительно выбирают модуль передачи (мм):
![]()
Принимая модуль стандартным, по табл. 3.20 определяют наименьшее допускаемое число зубьев меньшего шкива г1 , вычисляют диаметр его делительной окружности D1 = mz1 и окружную скорость ремня (м/с):
![]()
Допускаемая удельная окружная сила, передаваемая ремнем:
![]()
а

Удельная расчетная сила, передаваемая ремнем (Н/см), при которой долговечность передачи составляет 3000-5000 ч,
![]()
где к{ - коэффициент, учитывающий передаточное число передачи:
![]()
*, - коэффициент, учитывающий число зубьев на дуге обхвата меньшего шкива:
Z0 |
4.5 |
5…7 |
7…9 |
9…11 |
11…13 |
Kz0 |
0.5…0.6 |
0.6…0.8 |
0.88…0.9 |
0.9…0.96 |
0.96…1 |
KH- коэффициент, учитывающий наличие в передаче натяжного ролика: кH= 1 при отсутствии ролика, kH= 0,9 при наличии одного ролика, kH 0,8 при применении двух роликов; кь - коэффициент, учитывающий неравномерность распределения нагрузки между витками каната в зависимости от ширины ремня Ъ:
![]()
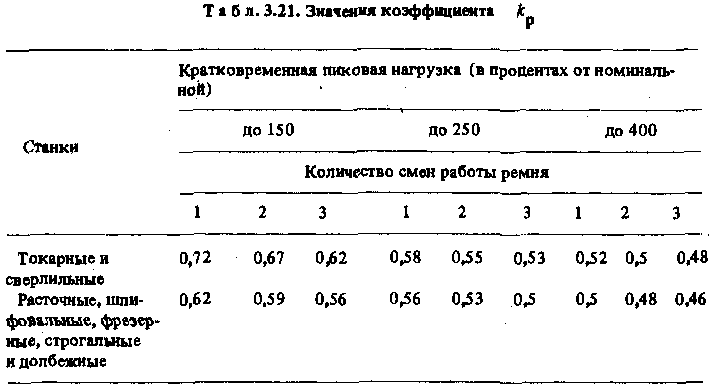
kp- коэффициент, учитывающий влияние режима и длительности работы передачи (табл. 3,21); кv— коэффициент, учитывающий влияние окружной скорости ремня на его долговечность, а именно, снижение работоспособности зубьев ремня из-за повышения частоты их нагружения и износа:
![]()
ка — коэффициент, учитывающий влияние длины ремня или межосевого расстояния а на его долговечность, а именно, повышение частоты нагружения зубьев ремней меньшей длины, их нагрев, неравномерность нагрузки по длине зубьев:
![]()
Расчетная окружная сила, передаваемая ремнем (Н),
![]()
Ширина ремня. Расчетная ширина ремня (см)
![]()
ширину ремня принимают стандартной (табл. 3.22).
Длина ремня. Число зубьев и диаметр делительной окружности большего шкива
![]()
Длина ремня без учета его провисания
![]()

Ближайший по длине ремень подбирают по стандарту и вычисляют уточненное межосевое расстояние

Проверка ремня по давлению на его зубьях. Расчетное давление на зубьях ремня (МПа)
![]()
где C1 - коэффициент, учитывающий неравномерность распределения окружной силы между зубьями ремня по дуге охвата: с1 = 1,7...2; с2 — коэффициент, учитывающий неравномерность распределения давления по высоте зубьев ремня: с2 = 1,5 при радиусе скругления головок зубьев шкива, равном 0,25 мм; с3 — коэффициент, учитывающий неравномерность распределения давления по длине зубьев ремня; b и h приведены в миллиметрах.
Допускаемое давление на зубьях ремня, зависящее от частоты вращения п быстроходного вала передачи:
![]()
Особенность расчета реверсивных передач. В реверсивных передачах манипуляторов, промышленных роботов, приводов подач станков с ЧПУ появляется динамическая окружная сила
![]()
где / - приведенный к шкиву передачи момент инерции подвижных частей привода; ε — угловое ускорение шкива; R - радиус шкива. Ширина ремня для реверсивной передачи
![]()
где k = 1.,.1,5.
Предварительное натяжение ремня. Предварительное натяжение необходимо для того, чтобы при нагружении передачи сохранилось натяжение ведомой ветви и зубья ремня нормально входили во впадины ведомого шкива. Сила предварительного натяжения должна составлять 0,4-0,6 расчетной окружной силы Fp .
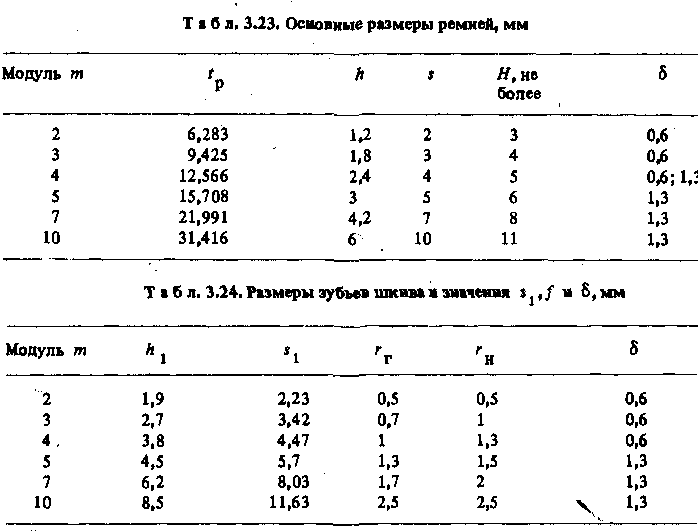
Параметры шкива. Для передачи с зубчатым ремнем их принимают следующими (рис.3.13,табл.3.23):
модуль передачи (мм)
![]()
диаметр окружности выступов (мм)
![]()
высота зуба h1 — по табл. 3.24;
угол
впадины![]() ;
;
окружной шаг по средней линии зубьев (мм)
![]()
толщина зуба (мм)
![]()
радиус головки зуба гг - по табл. 3.24; радиус ножки зуба гд - по табл. 3.24; длина зуба (мм)
![]()
На
меньшем шкиве делают реборду высотой
![]() ,
равной модулю т
для
ремней с модулем от 2 до 7 мм или 8 мм для
ремней с модулем 10 мм (рис. 3.13).
,
равной модулю т
для
ремней с модулем от 2 до 7 мм или 8 мм для
ремней с модулем 10 мм (рис. 3.13).