

25. Адаптивная система управления с прямой и инверсной моделями.
Адаптивные системы с ЭМ содержат динамическую модель системы, обладающую требуемым качеством. Адаптивные системы с идентификатором делятся по способу управления на
прямой
косвенный(непрямой).
При косвенном адаптивном управлении сначала делается оценка параметров объекта, после чего на основании полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на
системы с сигнальной (пассивной)
системы с параметрической (активной) адаптацией.
В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе оба вида адаптации называют
комбинированными.
26. Правила обучения искусственных нейронных сетей.
Фундаментальным свойством мозга является способность к обучению. Процесс обучения может рассматриваться как определение архитектуры сети и настройки весов связей для эффективного выполнения специальной задачи. Нейросеть настраивает весы связей под имеющееся обучающее множество.
Для процесса обучения необходимо иметь модель внешней среды, в которой функционирует нейронная сеть - нужную для решения задачи информацию. Во-вторых, необходимо определить, как настраиваются весы связей сети. Алгоритм обучения означает процедуру, в которой используются правила обучения для настраивания весов.
Существуют три вида обучения: "с учителем", "без учителя" (самообучение) и смешанное. В первом случае нейросеть имеет в своем распоряжении правильные ответы (выходы сети) на каждый входной пример. Весы настраиваются так, чтобы сеть вырабатывала ответы близкие к известным правильным ответам. Обучение без учителя не требует знания правильных ответов на каждый пример обучающей выборки. В этом случае используется внутренняя структура данных и корреляция между образцами в обучающем множестве для распределения образцов по категориям. При смешанном обучении часть весов определяется по помощи обучения с учителем, в то время как другая определяется по помощи самообучения.
27. Адаптивная система управления с прямой и инверсной моделью объекта.
28. Аналитические методы синтеза интеллектуальных систем управления на основе «нечетких» множеств.
29. Функциональные схемы систем управления с использованием вектора состояний и прогноза обобщенной ошибки.
30. Способы реализации ассоциативной памяти.
31. Самообучающая система управления на основе нейронных сетей.
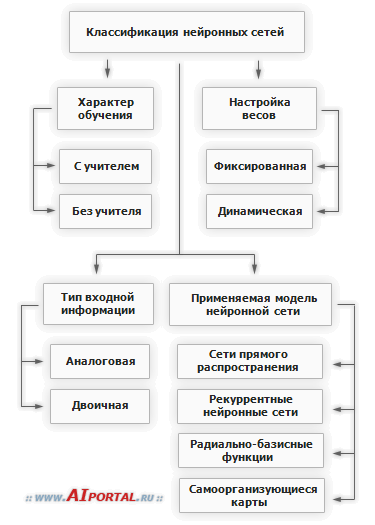
32. Классификация искусственных нейронных сетей. RBF-сети.
33.Синергетический подход к синтезу систем управления
34. Понятия «нормы» передаточной функции робастной системы управления.
35. Понятия «робастная» устойчивость систем управления.
36. Общее представление о робастных системах управления.
37. Виды неопределенности в системах управления.
38. Понятие «номинальная модель» в робастных системах управления.
39. Понятия «неопределенности» в системах управления.
40. Методы синтеза робастных систем управления в Matlab-е.
41. «Нормы» передаточных функций в робастных системах управления.
42. Функционалы, характеризующие качество работы робастных систем управления.