

1.1.2 Системы регулирования частоты вращения дизель-генераторов
Изменение нагрузки судовой электростанции, например, включение мощных приемников электроэнергии (пожарного насоса, компрессора пускового воздуха, работа грузовых лебедок и т.п.) вызывает изменение величины тормозного электромагнитного момента генераторов и, как следствие, изменение частоты вращения приводных двигателей генераторов.
В свою очередь, это приводит к изменению частоты тока и напряжения синхронных генераторов, что неблагоприятно сказывается на работе приемников электроэнергии. Особенно чувствительны к провалам напряжения трехфазные асинхронные двигатели, у которых вращающий электромагнитный момент прямо пропорционален квадрату напряжения. Поэтому провалы напряжения могут привести к остановке (насосы, вентиляторы) и даже реверсу (грузовые лебедки, краны, брашпили) электродвигателей.
Провалы напряжения неблагоприятно сказываются на работе люминесцентных светильников, которые при этом гаснут. В то же время для восстановления нормального свечения им необходимо несколько десятков секунд или даже минут (в зависимости от типа лампы). Поэтому приводные двигатели (ПД) генераторов – дизели и турбины, обязательно снабжают автоматическими регуляторами частоты (АРЧ) вращения.
Основное требование к ПД генераторных агрегатов любого типа - сохранение частоты вращения вала ПД, что необходимо для стабилизации частоты тока генераторов. Поэтому ГА снабжают АРЧ, для которых регулирующим воздействием является изменение подачи топлива (пара), а регулирующим органом - топливная рейка у дизелей и паровпускной клапан у турбин.
К основным характеристикам АРЧ относятся регуляторные и скоростные.
Регуляторная характеристика представляет собой зависимость частоты вращения n приводного двигателя от мощности Р генератора при фиксированном положении регулирующего органа – рейки топливного насоса (рис. 1.2).
О сновным
параметром регуляторной характеристики
является наклон или статизм в (%)
сновным
параметром регуляторной характеристики
является наклон или статизм в (%)
δ
= [ (n![]() -
n
-
n
![]() )
/ n
]100 , (1.1)
)
/ n
]100 , (1.1)
где n и n - частоты вращения соответственно холостого хода и номинальная, об/мин.
Для астатической характеристики δ = 0, т. е. частота вращения приводного двигателя ГА не зависит от нагрузки генератора (см. рис. 2.1, характеристика 1). Иначе говоря, определенному значению частоты вращения ПД соответствует множество значений мощности генератора. Это не позволяет обеспечить пропорциональное распределение активных нагрузок параллельно работающих синхронных генераторов. Иначе говоря, ПД с астатической регуляторной характеристикой нужно применять только при одиночной работе ГА с целью идеальной стабилизации частоты вращения ПД.
К скоростным характеристикам АРЧ относятся внешние и частичные (ограничительные).
Внешней характеристикой
называется зависимость мощности ДВС
N![]() от
частоты вращения вала n
при подаче топлива, соответствующей
номинальной мощности дизеля. На рис.
1.2 при частоте вращения n = n
от
частоты вращения вала n
при подаче топлива, соответствующей
номинальной мощности дизеля. На рис.
1.2 при частоте вращения n = n![]() (т.е.
при n
(т.е.
при n![]() =
100%) мощность дизеля N
=
100%.
=
100%) мощность дизеля N
=
100%.
При уменьшении
частоты вращения (но неизменной подаче
топлива) мощность дизеля уменьшается.
На рис. 1.2, при работе дизеля на внешней
характеристике 1 и уменьшении частоты
вращения до минимально допустимого
значения n![]() =
25% n
мощность дизеля N
≈
45%.
=
25% n
мощность дизеля N
≈
45%.
Поскольку работа двигателя по внешней характеристике сопровождается дымным выпуском, высоким расходом топлива, высокой температурой выпускных газов и нарушением теплового равновесия двигателя, в эксплуатации работа на внешней предельной характеристике или даже на отдельных точках этой характеристики не допускается. Частичной характеристикой называется зависимость мощности ДВС N от частоты вращения вала n при подаче топлива, соответствующей меньшим номинальной значениям мощности дизеля. Частичная характеристика лежит ниже внешней и определяет верхний предел поля допустимых наибольших мощностей при длительной работе двигателя и без дымления.
Обычно параметры внешних и частичных характеристик выражают в процентах (рис. 1.3, 1.4) или относительных единицах.
Поле возможных режимов работы ДВС совместно с генератором электрической энергии (рис. 1.3) расположено в интервале n' - n'' допустимого отклонения частоты вращения генератора от номинального значения (на рис. 1.3 заштриховано).
|
|
Рисунок 1.3 – Характеристики ДВС, работающего совместно генератором: 1 – внешняя (при номинальной мощности); 2, 3 – частичные |
Рисунок 1.4 - Совмещенные характеристики ДВС и генератора: 1 – внешняя ДВС; 2 – частичная ДВС; 3, 4 – нагрузочные генератора при уменьшении нагрузки (3) и номинальной нагрузке (4) |
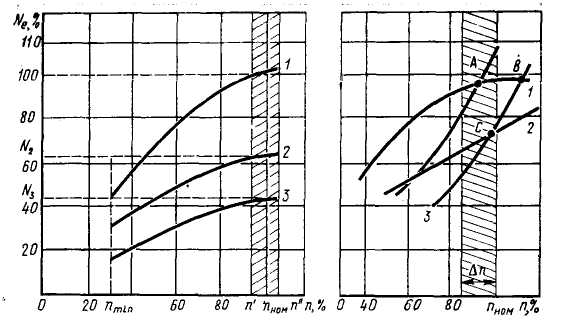
Из рис. 1.3 видно, что при уменьшении электрической нагрузки до значения N2 или N3 двигатель должен перейти на частичные внешние характеристики 2 или 3, для чего надо уменьшить подачу топлива.
Для оценки работы двигателя с генератором обычно рассматривают их совмещенные характеристики (рис. 1.4).
Если принять, что точка А пересечения внешней характеристики 1 ДВС и нагрузочной характеристики 4 генератора представляет номинальный режим работы, a Δn – допустимое изменение частоты вращения, то очевидно, что даже незначительное уменьшение нагрузки генератора (характеристика 3) повлечет за собой изменение частоты вращения, выходящее за намеченную границу (новый режим работы устанавливается в точке В).
Для обеспечения заданного диапазона частоты вращения нужно при новой нагрузке генератора перейти на новую частичную характеристику 2 двигателя, тогда новый режим работы установится в точке С. Для перехода на частичную характеристику 2 при незначительном уменьшении нагрузки и увеличении частоты вращения следует воздействовать на рейку топливных насосов в сторону уменьшения подачи, а при увеличении нагрузки на генератор и понижении частоты вращения — в сторону увеличения подачи топлива.
Для этой цели на приводной двигатель, работающий совместно с генератором, устанавливают регулятор, который может поддерживать один скоростной режим в пределах допустимого изменения частоты вращения Δn.
Дизель-генератор и регулятор частоты вращения образуют замкнутую систему автоматического регулирования, которая обеспечивает автоматическое поддержание частоты вращения коленчатого вала двигателя с заданной степенью точности.
По классификационным признакам и назначению существуют различные типы регуляторов (табл. 1.1).
Таблица 1.1 - Классификация регуляторов частоты вращений вала приводных двигателей ГА
Тип регулятора |
Выполняемые функции |
По назначению и режимности работы |
|
Однорежимный |
Поддерживает один скоростной режим |
Двухрежимный
|
Поддерживает два скоростных режима (минимально устойчивой и номинальной частоты вращения) |
Всережимный
|
Поддерживает любой скоростной заданный режим двигателя (выше минимально устойчивой частоты вращения) |
Предельный |
Включается в работу только в случае превышения номинальной частоты вращения |
По типу измерительной части регулятора |
|
Механический
|
Входной сигнал (частота вращения) преобразуется измерителем регулятора в механическое перемещение |
Гидравлический
|
Входной сигнал (частота вращения) преобразуется в энергию давления масла |
Электрический |
Входной сигнал (частота вращения) преобразуется в электрическую величину (напряжение или ток) и механическое перемещение |
По способу воздействия измерительного устройства на регулирующий орган |
|
Прямого действия
|
Перемещение рейки топливного насоса высого давления (ТНВД) происходит только за счет энергии, сообщаемой ей измерительной частью регулятора |
Непрямого действия |
Выходной сигнал измерительной части регулятора передается на топливную рейку усиленным (через усилитель) |
По количеству входных сигналов |
|
Одноимпульсные
|
Работает по отклонению только одной величины (частоты вращения) |
Двухимпульсные |
Работает по отклонению двух величин (частоты вращения и активной нагрузки генератора) |
По виду регуляторной характеристики |
|
Астатический
|
Поддерживает частоту вращения постоянной при любых нагрузках |
Статический
|
Поддерживает частоту вращения коленчатого вала дизеля в установленных пределах Δn при изменении нагрузки |
Комбинированный |
В зависимости от настройки может работать как по статической, так и по астатической характеристике |
По осуществляемому закону регулирования |
|
Интегральный (И-регулятор) |
Отклонение частоты вращения влияет только на скорость перемещения рейки ТНВД |
Продолжение таблицы 1.1 |
|
Пропорциональный (П-регулятор) |
Отклонение частоты вращения влияет только на величину перемещения рейки топливных насосов |
Пропорционально-интегральный (ПИ- регулятор) |
Отклонение частоты вращения влияет на величину и скорость перемещения рейки топливных насосов
|
По типу обратных связей |
|
С жесткой обратной связью |
Осуществляет пропорциональный закон регулирования (П-регулятор). Регуляторная характеристика статическая |
С гибкой обратной связью |
Осуществляет пропорционально-интегральный закон регулирования (ПИ-регулятор), Регуляторная характеристика астатическая. |
Применение того или иного вида АРЧ зависит от условий работы ГА (одиночная, параллельная работа) и от требований, предъявляемых к точности регулирования частоты вращения ГА.
Например, АРЧ, обеспечивающие работу приводных двигателей ГА по астатическим характеристикам, применяют только при одиночной работе ГА и называют астатическими. Такие регуляторы называют также интегральными, или регуляторами И-типа. У них отклонение частоты вращения влияет только на скорость перемещения рейки ТНВД.
АРЧ, предназначенные для обеспечения параллельной работы ГА, должны работать только по статическим характеристикам. Для статической характеристики δ > 0, т. е. частота вращения ПД уменьшается с увеличением нагрузки генератора (рис. 1.1, характеристика 2). Такие регуляторы называют статическими а также пропорциональными или регуляторами П-типа. У них отклонение частоты вращения влияет только на величину перемещения рейки топливных насосов
Регуляторы, обеспечивающие работу ПД по астатической и статической характеристикам, называют универсально-статическими. Такие регуляторы называют также пропорционально-интегральными или регуляторами ПИ-типа. У них отклонение частоты вращения влияет как на величину, так и на скорость перемещения рейки топливных насосов.
В зависимости от изменяемых величин различают АРЧ одно- и двухимпульсные. Одноимпульсные АРЧ изменяют подачу топлива при изменении частоты и потому снабжаются центробежными (частоты вращения вала) или электрическими (частоты тока) датчиками.
Двухимпульсные АРЧ дополнительно снабжены датчиком активного тока, поэтому у них подача топлива зависит как от частоты вращения (тока), так и от активной нагрузки. Точность стабилизации частоты вращения у них лучше, чем у одноимпульсных, но при этом усложняется схема управления АРЧ.
В зависимости от наличия усиления различают АРЧ прямого и непрямого действия. В АРЧ прямого действия датчик частоты вращения воздействует на регулирующий орган непосредственно, а в АРЧ непрямого действия - через усилитель (сервомотор).
АРЧ прямого действия применяются для ГА небольшой мощности. На большинстве современных судов применяются двухимпульсные АРЧ.
Принцип работы центробежного регулятора прямого действия. Регулятор называется центробежным потому, что его действие основано на изменении центробежных сил, возникающих при разных значениях частоты вращения его грузов. Как известно, центробежная сила возникает при вращении любого тела (груза). В регуляторе таким вращающимся телом является траверса (диск). Диск (рис. 1.5) приводится во вращение через зубчатую передачу от коленчатого вала дизеля.
К краям диска шарнирно прикреплены два
рычага с одинаковыми грузами, по одному
на каждом рычаге. Грузы вращаются вместе
с диском регулятора вокруг вертикальной
оси и шарнирно связаны со скользящей
муфтой, которая может свободно перемещаться
вверх или вниз. Весь этот узел называется
измерителем частоты вращения коленчатого
вала дизеля. Это исходный основной орган
регулятора.
краям диска шарнирно прикреплены два
рычага с одинаковыми грузами, по одному
на каждом рычаге. Грузы вращаются вместе
с диском регулятора вокруг вертикальной
оси и шарнирно связаны со скользящей
муфтой, которая может свободно перемещаться
вверх или вниз. Весь этот узел называется
измерителем частоты вращения коленчатого
вала дизеля. Это исходный основной орган
регулятора.
Пружина регулятора имеет определенную затяжку (силу предварительного сжатия). Эта сила пружины соответствует заданной частоте вращения, т. е. уравновешивается вертикальной составляющей от центробежной силы грузов. Сила затяжки (настройки) пружины задается механиком. Когда подача топлива в цилиндры соответствует нагрузке дизеля, его коленчатый вал вращается с некоторой постоянной частотой и вся система регулятора находится в равновесии. Рассмотрим, что произойдет, если нагрузка на дизель изменится, например уменьшится. В этом случае частота вращения вала дизеля при той же подаче топлива увеличится, соответственно увеличится и частота вращения диска регулятора, а следовательно, и связанных с ним двух грузов. Грузы регулятора под влиянием центробежных сил расходятся и, преодолевая усилие пружины, поднимаются вверх, увлекая за собой муфту. Положение муфты изменяется всякий раз, когда изменяется частота вращения коленчатого вала дизеля. Иными словами, разной частоте вращения соответствует разное положение муфты регулятора. Именно при переходе муфты в новое положение регулятор выполняет свое назначение, т. е. создает силу, необходимую для перемещения реек топливных насосов. В самом деле, при уменьшении нагрузки на дизель и перемещении муфты рычаг АРВ будет воздействовать на рейки топливных насосов, вызывая поворот плунжера в сторону уменьшения подачи топлива в цилиндры дизеля: частота вращения коленчатого вала начнет уменьшаться. Это будет происходить до тех пор, пока центробежная сила грузов не уравновесится силой пружины регулятора. Благодаря такому устройству регулятора частота вращения вала дизеля при уменьшении нагрузки устанавливается всегда примерно постоянной. Наоборот, при увеличении нагрузки частота вращения коленчатого вала дизеля уменьшится, грузы регулятора сблизятся, муфта несколько опустится и рычаг АРВ, переставляя рейки топливных насосов, заставит их увеличивать подачу топлива в цилиндры до тех пор, пока снова не восстановится нарушенное равновесие.
Такой простой по устройству регулятор называется центробежным регулятором прямого действия, так как он прямо (непосредственно) воздействует на рейки топливных насосов, т, е. его рычаг жестко связан с рейкой.
Д вухимпульсный
АРЧ. Повысить
качественные показатели работы систем
стабилизации частоты можно, используя
принцип комбинированного регулирования.
Известно много разновидностей
комбинированных систем стабилизации
частоты. На рис. 1.6 приведена структурная
схема комбинированной системы стабилизации
частоты вращения дизеля, в которую
входят следующие основные элементы:
дизель М;
синхронный
генератор G;
электрогидравлический усилитель ЭГУ,
состоящий
из гидроусилителя ГУ1
и электромагнитов
ЭМ1 и
ЭМ2; магнитный
или полупроводниковый усилитель У;
измеритель частоты вращения ЦЭ;
измеритель
нагрузки ИН;
исполнительный
орган ИО.
вухимпульсный
АРЧ. Повысить
качественные показатели работы систем
стабилизации частоты можно, используя
принцип комбинированного регулирования.
Известно много разновидностей
комбинированных систем стабилизации
частоты. На рис. 1.6 приведена структурная
схема комбинированной системы стабилизации
частоты вращения дизеля, в которую
входят следующие основные элементы:
дизель М;
синхронный
генератор G;
электрогидравлический усилитель ЭГУ,
состоящий
из гидроусилителя ГУ1
и электромагнитов
ЭМ1 и
ЭМ2; магнитный
или полупроводниковый усилитель У;
измеритель частоты вращения ЦЭ;
измеритель
нагрузки ИН;
исполнительный
орган ИО.
В системе, электрическая схема регулятора
которой представлена на рис. 1.7, измерителем
частоты вращения является центробежный
элемент ЦЭ,
а измерителем активной нагрузки –
фазочувствительный мост. Измеритель
нагрузки ИН
реагирует на изменение активной нагрузки
и с помощью электромагнитов ЭМ1
и ЭМ2
передвигает
золотник гидроусилителя ГУ1,
который
воздействует параллельно с центробежным
измерительным элементом через
гидроусилитель ГУ2
(на рис. 1.7 не показан) на исполнительный
орган ИО
– рейку топливного насоса.
системе, электрическая схема регулятора
которой представлена на рис. 1.7, измерителем
частоты вращения является центробежный
элемент ЦЭ,
а измерителем активной нагрузки –
фазочувствительный мост. Измеритель
нагрузки ИН
реагирует на изменение активной нагрузки
и с помощью электромагнитов ЭМ1
и ЭМ2
передвигает
золотник гидроусилителя ГУ1,
который
воздействует параллельно с центробежным
измерительным элементом через
гидроусилитель ГУ2
(на рис. 1.7 не показан) на исполнительный
орган ИО
– рейку топливного насоса.
Принцип работы измерителя активной нагрузки состоит в следующем. Вторичные обмотки трансформаторов T1, T2 и Т3 (см. рис. 1.7) имеют одинаковое число витков, поэтому при отсутствии тока нагрузки напряжения U4 и U5 будут одинаковы и напряжение выхода измерительного элемента равно нулю.
При приложении к генератору активной нагрузки (cosφ=l) падение напряжения U3 на сопротивлении r3 совпадает по фазе, например, с напряжением U1 и находится в противофазе с напряжением U2. Следовательно, на одном из трансформаторов Т2 или ТЗ напряжение повышается, а на другом понижается, и на выходе измерительного элемента появится разность потенциалов Uвых. При чисто реактивной нагрузке генератора (соsφ = 0) падение напряжения на сопротивлении r3 будет сдвинуто на 90° относительно напряжения на одной из обмоток трансформатора Т1 и на -90° относительно напряжения на другой обмотке. Это вызовет одинаковое увеличение напряжения на вторичных обмотках трансформаторов Т2 и ТЗ, и разность потенциалов на выходе измерительного элемента, а следовательно, и на зажимах обмоток электромагнитов ЭМ1 и ЭМ2 будет равна нулю. При смешанной нагрузке генератора напряжение на выходе будет составлять
![]()
Если значение напряжения U3 мало по сравнению со значениями напряжений U4 и U5, то
![]() ;
;
![]() .
.
Учитывая, что U1 = U2, получим
![]() ,
,
где k – коэффициент пропорциональности; Iа – активная составляющая тока.
Таким образом, при смешанной нагрузке генератора напряжение на выходе измерительного элемента пропорционально активной составляющей тока нагрузки.
Итак, при холостом ходе генератора выходные напряжения U'1 и U'5 трансформаторов Т2 и ТЗ, приложенные к обмоткам электромагнитов, равны между собой. Якорь электромагнита уравновешен и находится в исходном горизонтальном положении.
При подаче нагрузки
и появлении управляющего сигнала
напряжения
![]() и
и
![]() на обмотках
электромагнита оказываются разными.
Якорь 2
притягивается
к стержню электромагнита 1
(на обмотке которого напряжение больше),
перемещая связанный с ним золотник 5
усилителя, управляющий движением поршня
4 (см.
рис. 1.7), а следовательно, и силовым
поршнем золотника гидроусилителя ГУ2.
Поршень 4
гидравлического
усилителя ГУ1
воздействует
на пружину обратной связи 3
так, чтобы
уравновесить электромагнитную силу на
якоре. При равенстве этих сил якорь и
золотник возвращаются в исходное
положение, а поршень останавливается
в другом положении.
на обмотках
электромагнита оказываются разными.
Якорь 2
притягивается
к стержню электромагнита 1
(на обмотке которого напряжение больше),
перемещая связанный с ним золотник 5
усилителя, управляющий движением поршня
4 (см.
рис. 1.7), а следовательно, и силовым
поршнем золотника гидроусилителя ГУ2.
Поршень 4
гидравлического
усилителя ГУ1
воздействует
на пружину обратной связи 3
так, чтобы
уравновесить электромагнитную силу на
якоре. При равенстве этих сил якорь и
золотник возвращаются в исходное
положение, а поршень останавливается
в другом положении.
Применение дифференциального электромагнита с клапанным якорем позволяет получить значительное тяговое усилие при малых габаритах. Характеристики электромагнита и гидроусилителя практически линейны. Таким образом, перемещение поршня электрогидравлического усилителя оказывается пропорциональным изменению активной нагрузки. В свою очередь поршень 4 связан с подвижной втулкой управляющего золотника, который является элементом суммирования сигналов по частоте вращения и нагрузки. Это позволяет иметь системе один исполнительный гидроусилитель ГУ2 для управления рейкой топливного насоса дизеля.