

Билет 18
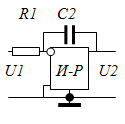
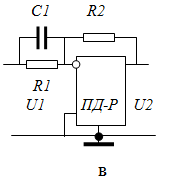
1) Какие свойства придает замкнутой одноконтурной САУ введение в регулятор интегрирующего и форсирующего звеньев? Как это реализуется аппаратно на регуляторе, выполненном на операционном усилителе?
2) Как
получить с использованием разложения
в ряд Лорана значения первых трёх дискрет
решетчатой функции выходного сигнала
Y[n],
представленного в виде рациональной
дроби
![]() ?
?
Интегральный регулятор формирует алгоритм управления в виде
 который обеспечивает астатизм
САУ(отсутствие установившейся ошибки)
Процессы в регуляторе описываются на
ОПУ описываются ОФП в виде
который обеспечивает астатизм
САУ(отсутствие установившейся ошибки)
Процессы в регуляторе описываются на
ОПУ описываются ОФП в виде
Пропорционально-дифференциальный регулятор, называемый форсирующим звеном, формирует алгоритм пропорционально-интегрального управления выходной величиной
 ,обеспечивает
форсирование ( ускорение во
времени)переходных процессов в САУ и
имеет ОФП
,обеспечивает
форсирование ( ускорение во
времени)переходных процессов в САУ и
имеет ОФП

Билет 19
1) По каким признакам непрерывные САУ разделяют на статические и астатические? Как влияет коэффициент усиления в статических и астатических САУ на величину установившейся ошибки управления? Поясните разницу в формировании установившейся ошибки по положению, скорости и ускорению с использованием теоремы о конечном значении функции ошибки.
2) Как
вычислить переходный процесс y(t)
при периоде квантования Т=0,1
с и
единичном ступенчатом задающем
воздействии g(t)=1[t]
, если z–
изображение
переходной функции
![]() .
.
Для замкнутых САУ по окончании переходного процесса выходная величина принимает установившееся значение, зависящее от возмущающего воздействия f, что создаёт неустранимую статическую ошибку управления e=g-y!=0. В астатических САУ при наличии возмущающего воздействия f по окончании переходного процесса ошибка управления устраняется либо уменьшается до очень малых величин.
При отработке типовых входных воздействий
А·1(t), А/p;
Vt, V/p2;
at2/2,
a/p3
установившаяся ошибка в САУ вычисляется
с использованием теоремы о конечном
значении функции ошибки по формуле: 
где ![]() -ОФП
по ошибке,
-ОФП
по ошибке,  ,
,
![]() Vt,
G(p)=V/p2;
g(t)= at2/2,
G(p)=a/p3
Vt,
G(p)=V/p2;
g(t)= at2/2,
G(p)=a/p3
Билет 20
1) Как определяется порядок астатизма непрерывных САУ? Какие САУ имеют астатизм нулевого, первого и второго порядков? Как определяются ошибки по положению, по скорости и по ускорению изменения задающего воздействия во времени с использованием метода коэффициентов ошибки?
2)
Определите с использованием теоремы о
конечном значении функции величину
установившейся ошибки в дискретной САУ
c
единичной обратной связью при задающем
воздействии
![]() ,
если ЗФП разомкнутой САУ
,
если ЗФП разомкнутой САУ
![]() .
.
1)
Для замкнутых САУ важна их классификация на статические и астатические. В астатических САУ при наличии возмущающего воздействия f по окончании переходного процесса ошибка управления устраняется либо уменьшается до очень малых величин. Статическая САУ имеет порядок астатизма v=0, астатические САУ имеют порядок астатизма v=1,2,3
Настройка на модульный оптимум (МО) придает замкнутому контуру и всей САУ астатизм первого порядка, соответствующий отсутствию установившейся ошибки по задающему воздействию.
Для
получения астатизма второго порядка
(отсутствия установившихся ошибок по
задающему воздействию и по скорости
его изменения) в разомкнутую цепь
оптимизированного по МО контура вводится
второй интегратор с постоянной времени
4![]() ,а
для обеспечения устойчивости контура
с двумя интеграторами дополнительно
вводится форсирующее
(пропорционально-дифференциальное)
звено с такой же постоянной времени
,а
для обеспечения устойчивости контура
с двумя интеграторами дополнительно
вводится форсирующее
(пропорционально-дифференциальное)
звено с такой же постоянной времени
![]() .
В результате ОФП разомкнутой цепи
контура приобретает вид, соответствующий
настройке на так называемый симметричный
оптимум (СО)
.
В результате ОФП разомкнутой цепи
контура приобретает вид, соответствующий
настройке на так называемый симметричный
оптимум (СО)

Точность САУ при произвольно заданном воздействии во времени g(t) в замкнутой САУ с передаточной функцией по ошибке

установившаяся ошибка может быть вычислена методом коэффициентов ошибки из разложения ОФП по ошибке в степенной ряд Тейлора

![]() G(p)
G(p)
![]()
где
![]()
![]() …
…![]() -коэффициенты
ошибки;
-коэффициенты
ошибки;
![]() =
=![]() -ошибка
по положению (по постоянной составляющей)
-ошибка
по положению (по постоянной составляющей)
![]() -ошибка
по скорости (по первой производной)
-ошибка
по скорости (по первой производной)
![]() -ошибка
по ускорению (по второй производной)
-ошибка
по ускорению (по второй производной)