Билет 7
1) Какие динамические звенья САУ называются типовыми? Какие свойства и ОФП имеют безынерционное, апериодическое, интегрирующее и форсирующее звенья? Как получить ОФП и частотные характеристики RC-фильтра нижних частот, представленного апериодическим звеном первого порядка?
2) Кривая Михайлова для устойчивой замкнутой САУ с характеристическим уравнением седьмого порядка пересекает отрицательную вещественную ось на комплексной плоскости в точках -20 и -160. Изобразите примерный вид этой кривой Михайлова, поясните порядок её построения и определите запас устойчивости по модулю (по коэффициенту передачи) в этой системе.
Типовые звенья: Различные звенья представляются в САУ типовыми динамическими звеньями, математические модели которых описываются линейными дифференциальными уравнениями не выше второго порядка. 4 группы типовых звеньев:
Позиционные, интегрирующие, дифференцирующие и запаздывающие.
`Позиционные – выходная величина пропорциональна входному воздействию.
Интегрирующие – выходная величина пропорциональна интегралу от входного воздействия
Дифференцирующие – выходная величина пропорциональна первой производной по времени от входного воздействия
Запаздывающие – выходная величина равна входной величине, сдвинутой в текущем времени на время запаздывания τ.
2) есть в тетради
Билет 8
1) Поясните представление одноконтурной замкнутой САУ динамическими однонаправленными звеньями регулятора, усилителя, объекта управления, датчика обратной связи и сумматора в виде алгоритмической структурной схемы (математической модели) и получите её математическое описание операторной функцией передачи (ОФП) в разомкнутом и замкнутом виде.
2) Система содержит сумматор, интегрирующий регулятор с Тр=0,01 с, инерционный усилитель с Ку = 10 и Ту = 0,02 с, инерционный объект управления с Коу = 5 и Toy = 0,1 с, датчик обратной связи с Кос = 0,1. Нарисуйте структурную схему САУ, получите выражения ОФП разомкнутой и замкнутой системы, запишите выражения ЛАЧХ и ЛФЧХ разомкнутой системы, нарисуйте примерный вид асимптотических ЛАЧХ и ЛФЧХ звеньев и всей разомкнутой САУ и определите по ним устойчивость замкнутой САУ с использованием логарифмического критерия устойчивости.
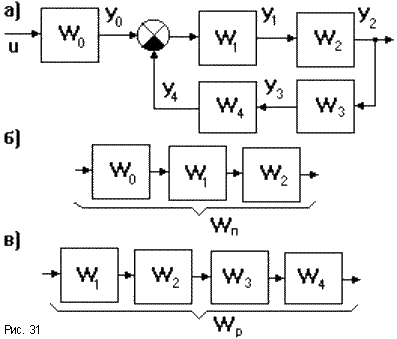
1) Замкнутую систему называют одноконтурной, если при ее размыкании в какой либо точке получают цепочку из последовательно соединенных элементов (рис.31а). Участок цепи, состоящий из последовательно соединенных звеньев, соединяющий точку приложения входного сигнала с точкой съема выходного сигнала называется прямой цепью (рис.31б, передаточная функция прямой цепи Wп = WoW1W2). Цепь из последовательно соединенных звеньев, входящих в замкнутый контур называют разомкнутой цепью (рис.46в, передаточная функция разомкнутой цепи Wp = W1W2W3W4). Исходя из приведенных выше способов эквивалентного преобразования структурных схем, одноконтурная система может быть представлена одним звеном с передаточной функцией: Wэкв = Wп/(1 ± Wp) - передаточная функция одноконтурной замкнутой системы с отрицательной ОС равна передаточной функции прямой цепи, деленной на единицу плюс передаточная функция разомкнутой цепи. Для положительной ОС в знаменателе знак минус. Если сменить точку снятия выходного сигнала, то меняется вид прямой цепи. Так, если считать выходным сигнал y1 на выходе звена W1, то Wp = WoW1. Выражение для передаточной функции разомкнутой цепи не зависит от точки снятия выходного сигнала.