

10.4. Элементы орбит и условия видимости спутников
Спутники обращаются вокруг Земли по орбитам, имеющим форму эллипса. Центр масс Земли является одним из фокусов эллипса. Наиболее удаленная от него точка орбиты называется апогеем, а наиболее близкая – перигеем. Точка на орбите, в которой спутник переходит из южного полушария Земли в северное называется восходящим узлом орбиты. Положение спутника изначально определяется в прямоугольной системе координат, начало которой находится в центре масс планеты. Ось OZ этой системы координат направлена по оси вращения Земли в сторону северного полюса, оси OX и OY лежат в плоскости экватора, перпендикулярно друг другу. В зависимости от того, вращается ли прямоугольная система координат вместе с Землей, различают два вида таких систем.
В инерциальной системе координат ось OX направлена в фиксированную точку на небесной сфере (точку весеннего равноденствия). Эта система как бы является неподвижной, а Земля вращается. В гринвичской системе ось OX направлена в фиксированную точку на Земле – в точку пересечения гринвичского меридиана с экватором. Эта система координат вращается вместе с Землей. Угол между осями OX инерциальной и гринвичской систем точно известен в любой момент времени, это так называемое гринвичское звездное время.
Положение спутников (их координаты x,y,z) первоначально определяется в инерциальной системе, а потом пересчитывается в связанную с Землей гринвичскую систему.
Чтобы для любого момента времени рассчитать по законам небесной механики точные координаты спутника, необходимо знать следующие шесть элементов его орбиты (рис. 10.4):
a – большую полуось эллипса орбиты,
e – эксцентриситет орбиты, характеризующий степень ее вытянутости,
Ω – прямое восхождение восходящего узла (угол между осью OX инерциальной системы и направлением на восходящий узел из начала системы координат); часто вместо Ω используют географическую долготу восходящего узла.
ω – аргумент перигея (угол между направлениями из начала координат на восходящий узел и на перигей),
i – наклонение орбиты (угол между плоскостью экватора и плоскостью орбиты),
τ – момент времени прохождения спутником перигея орбиты.
Параметры a и e характеризуют геометрическую форму и размеры орбиты, а Ω, ω и i - расположение орбиты относительно Земли.
Место на орбите, в котором в данный момент находится спутник, определяется аргументом широты. Это угол между направлениями из центра Земли на восходящий узел и на спутник. Чтобы рассчитать для любого момента времени значения аргумента широты, необходимо знать шестой элемент орбиты - τ .
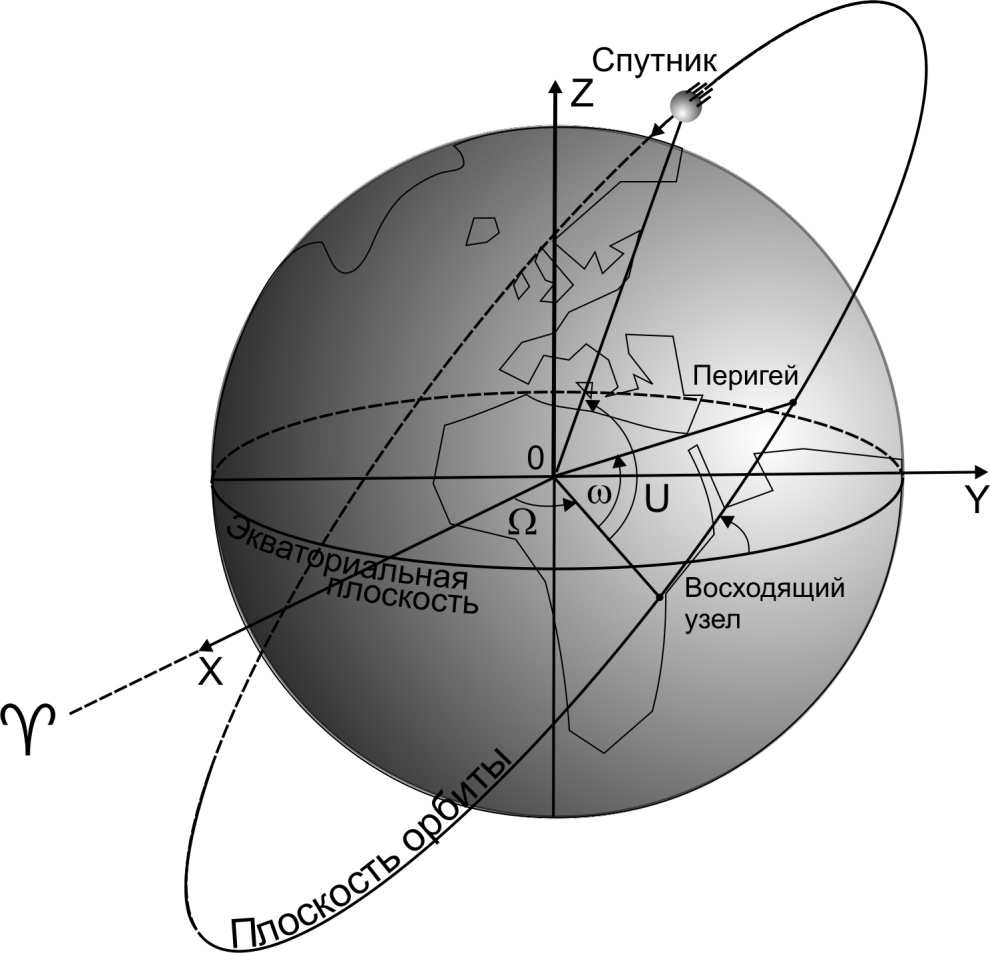
Рис. 10.4. Элементы орбиты спутника
Из-за возмущающего гравитационного воздействия Солнца и Луны, из-за неоднородности гравитационного поля Земли и нестабильности скорости ее вращения элементы орбиты непрерывно, хотя и медленно, меняются. Поэтому они должны систематически уточняться.
Необходимым условием приема сигнала от спутника является его нахождение в пределах прямой видимости от наблюдателя (бортового приемника), то есть спутник должен находиться выше горизонта. Угол между плоскостью горизонта и направлением на небесное светило (в нашем случае – на спутник) называется в астрономии высотой светила. В технической литературе этот же угол чаще называют «углом места», что позволяет не путать эту угловую высоту над горизонтом с линейной высотой (расстоянием спутника от поверхности Земли).
Таким образом, если спутник находится выше горизонта, то его угол места больше нуля. Но если спутник находится слишком низко над горизонтом, то спутник нельзя надежно использовать для навигационных определений, поскольку его сигнал проходит через большую толщу атмосферы, что изменяет его скорость и траекторию распространения. Поэтому в большинстве бортовых приемников используется определенное значение минимального угла места спутника (так называемый угол маски), при котором он может использоваться для навигации. Обычно угол маски имеет величину порядка 5°. Если угол места (угловая высота спутника над горизонтом) меньше угла маски, то этот спутник игнорируется программным обеспечением приемника.
Зная радиус земли R, геометрическую (линейную) высоту спутника H над поверхностью Земли и угол маски hм, можно рассчитать горизонтальную дальность видимости спутника Dвид, то есть максимальное расстояние от приемника до точки на Земле, находящейся прямо под спутником (рис. Х.5).

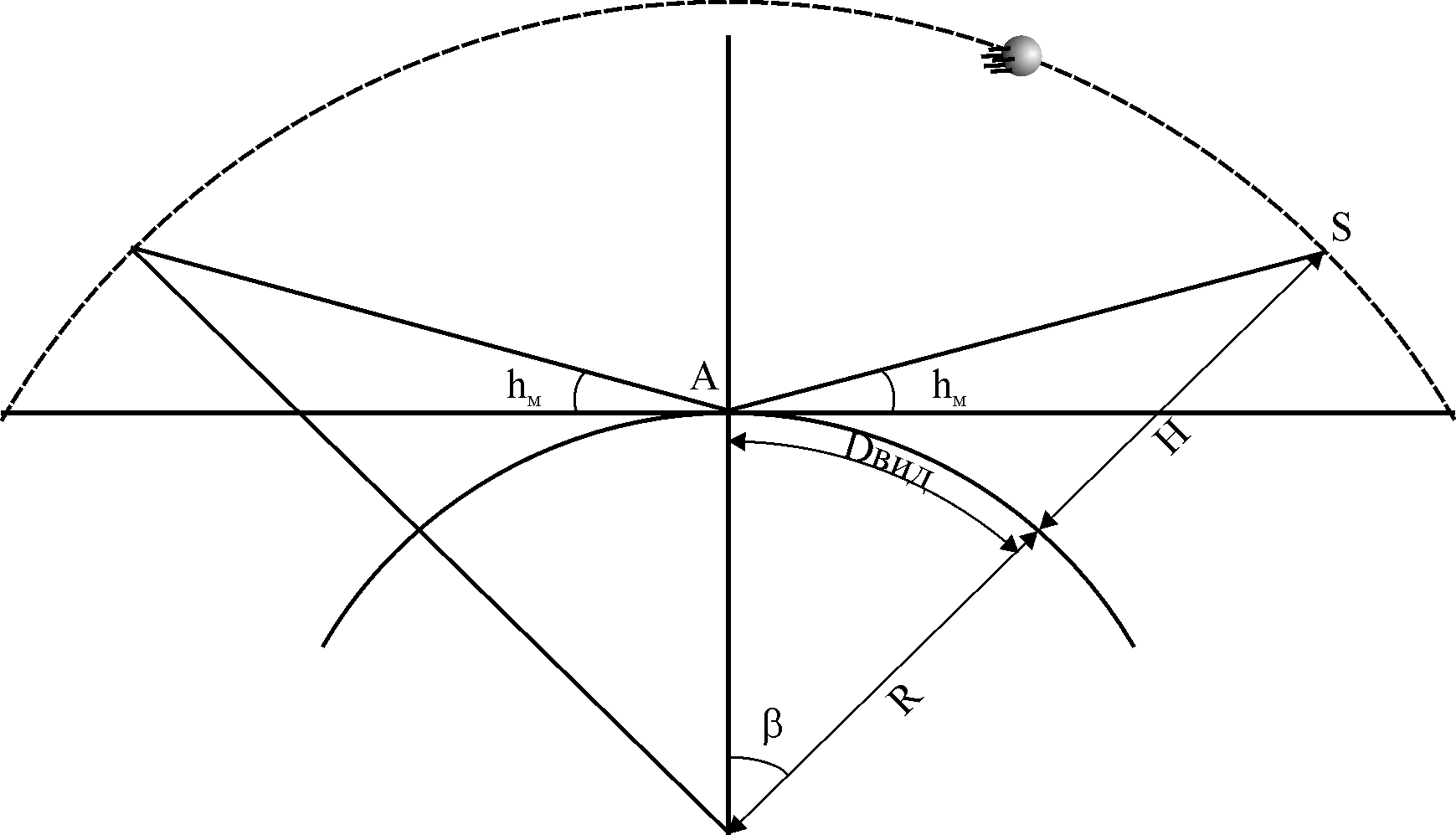
Рис. 10.5. Дальность видимости спутника
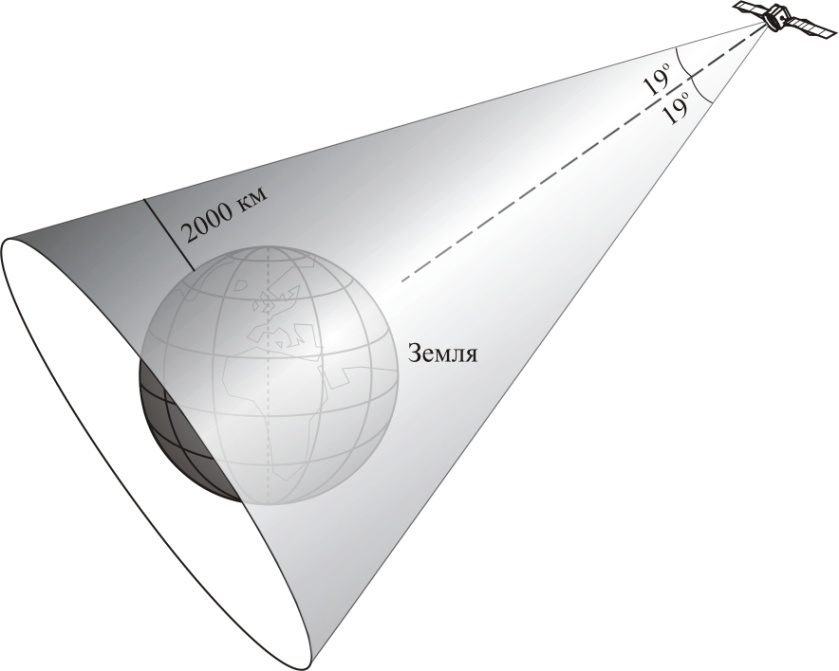
Рис.10.6. Направленное излучение спутников
Излучение спутников направлено не во все стороны, а в сторону Земли. В ГЛОНАСС излучение осуществляется в пределах конуса с углом раствора ±19°. Этот конус охватывает всю планету таким образом, что образующие конуса проходят на высоте около 2000 км от поверхности Земли (рис. 10.6). В Navstar GPS, из-за того, что конус более узкий, эта высота составляет около 300 км.