

8. Применение бортовых радиолокационных станций
8.1. Принцип работы бортовых рлс
Бортовая радиолокационная станция (БРЛС) является автономным радиотехническим средством, позволяющим наблюдать радиолокационное изображение пролетаемой местности и окружающей воздушной обстановки, а так же измерять курсовые углы, и наклонные дальности до ориентиров.
БРЛС может использоваться не только для решения навигационных задач, но и для предотвращения попадания в зоны опасных метеоявлений. В середине ХХ века бортовой радиолокатор был одним из основных средств навигации, но в настоящее время из-за невысокой точности он уступил свое место более точным радионавигационным средствам. Но как средство предотвращения попадания в зоны грозовой деятельности сохранил свое значение. Поэтому на современных ВС БРЛС чаще называют метеонавигационными РЛС (МНРЛС). Некоторые типы БРЛС давали также возможность предотвращения опасных сближений с другими ВС.
В данной части учебного пособия будет рассмотрено применение БРЛС для навигации. Ее использование для обхода зон грозовой деятельности будет рассмотрено в другой части, в теме, посвященной обеспечению безопасности полетов.
БРЛС является автономным средством, а не системой, поэтому ее нельзя, разумеется, отнести к классу угломерных, дальномерных или иных систем. Но с ее помощью место самолета можно определить как угломерным, так и дальномерным или угломерно-дальномерным способом. При этом можно определить пеленги и дальности одновременно нескольких ориентиров
Принцип работы бортовой РЛС такой же, как и у наземных РЛС. Он заключается в излучении бортовой антенной электромагнитных импульсов, их отражении от объектов, и приёме отражённых сигналов бортовой антенной. Упрощенная блок-схема БРЛС представлена на рис. 8.1.
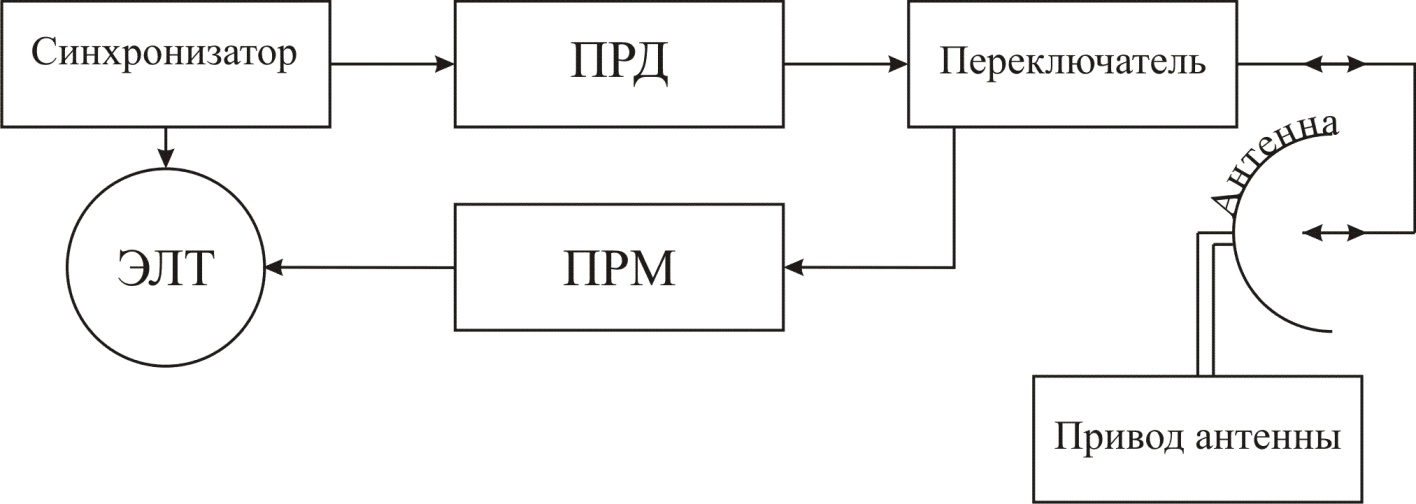
Рис. 8.1. Упрощенная схема БРЛС
Синхронизатор вырабатывает периодическую последовательность запускающих импульсов, которые поступают на передатчик (ПРД) и ЭЛТ. Под их воздействием передатчик генерирует и излучает через антенну мощные импульсы в сантиметровом диапазоне волн. Одновременно начинается развёртка на ЭЛТ, то есть «линия прицеливания» электронной пушки начинает отклоняться от центра экрана.
Отражённый от объекта импульс принимается через антенну и приёмник (ПРМ), и подаётся на ЭЛТ. В этот момент пушка излучает электроны, образуя пятно на экране трубки. Расстояние отметки объекта от начала развёртки пропорционально времени прохождения сигнала и, следовательно, удалению до объекта.
С помощью привода (электродвигателя) антенна сканирует (вращается), излучая импульсы по различным направлениям. В результате послесвечения экрана отметки объектов по всем направлениям сливаются в единое изображение. На экране электронным путём формируются метки дальности, с помощью которых можно определить расстояние до объекта.
Одна и та же антенна предназначена как для излучения, так и для приема сигналов. Чтобы мощный излучаемый сигнал не попал в приемник, антенный переключатель отключает приемник от антенны в момент излучения импульса.
Использовались БРЛС как переднего обзора, в которых антенна располагается в носовой части ВС и сканирует вправо-влево в определенном секторе, так и БРЛС кругового обзора, в которых антенна вращается на 360°. В этом случае антенна располагается под фюзеляжем.
Бортовые РЛС применяются в авиации с 50-ых годов и, конечно, за прошедшие десятилетия было создано много их разновидностей. В гражданской авиации применялись такие БРЛС как РОЗ-1, РПСН-2 и другие. Наиболее распространены были радиолокаторы серии «Гроза», которые в принципе имели одинаковое устройство и похожие органы управления, но несколько различались в зависимости от того, для какого типа ВС были предназначены. Соответственно, на Ту-154 устанавливалась «Гроза-154», на Ан-26 «Гроза-26» и т.д. Рассмотрим органы управления БРЛС на основе устройств этой серии.