

8. Разностно-дальномерные радионавигационные системы
8.1. Принцип работы рдрнс.
Как уже отмечалось в п. , измеряемым навигационным параметром в разностно-дальномерных радионавигационных системах (РДРНС) является разность расстояний (дальностей) от ВС до двух радиостанций:
ΔD= D2 – D1.
При этом сами дальности остаются неизвестными. Ведь если бы они были измерены, то не было бы необходимости определять еще и ΔD. Получилась бы просто дальномерная система.
Каким же образом можно измерить разность двух расстояний, не зная сами расстояния? Оказывается это можно сделать минимум двумя способами.
Радиостанции РДРНС работают не каждая сама по себе (как, например, VOR или ОПРС), а излучают сигналы согласованно друг с другом, образуют систему.
При использовании импульсного способа обе радиостанции одновременно излучают радиоимпульсы, которые достигают ВС не одновременно. Сначала придет импульс от той радиостанции, которая ближе, и лишь затем от более удаленной радиостанции. Время запаздывания второго импульса относительно первого Δt будет зависеть от того, насколько D2 больше, чем D1. Очевидно, что
ΔD = c Δt,
где c – скорость распространения радиоволн.
При использовании фазового способа обе радиостанции излучают не импульсы, а непрерывные синусоидальные колебания, но строго синхронизированные по фазе. Вследствие различия расстояний, которые каждая из радиоволн должна пройти до ВС. принимаемые сигналы различаются по фазе (см. рис. 2.2, б). Измеренный бортовым приемником сдвиг фаз также зависит от ΔD.
Фазовый метод имеет недостаток, заключающийся в том, что при увеличении разности расстояний сдвиг по фазе повторяется с периодом 2π, то есть каждому значению сдвига соответствует несколько значений ΔD и линий положения. Расстояние между такими линиями положения называется фазовой дорожной, ширина которой зависит от длины волны. Однозначное определение линии положения возможно только в случае, когда известно, в пределах какой именно фазовой дорожки находится ВС. Неоднозначность устраняется либо излучением на нескольких частотах с разной шириной дорожек, либо путем комбинирования импульсного и фазового способа.
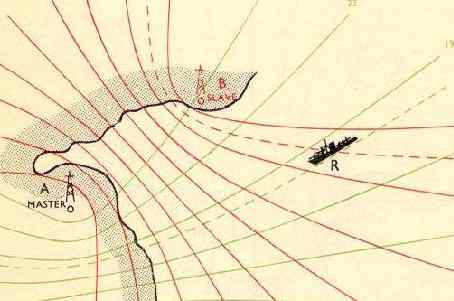
Линия положения для навигационного параметра ΔD называется линией равных разностей расстояний (ЛРРР) и имеет вид гиперболы (см. п. и рис.2.16). Поэтому разностно-дальномерные системы ткже называют гиперболическими.
Таким образом, для определения одной линии положения необходимы две радиостанции. Но для определения места самолета нужно две линии положения. Для этого нужно иметь минимум три станции, из которых можно выбрать три пары станций и для каждой определить линию положения. Точка пересечения линий положения и даст место самолета..
Фазовый метод определения координат основан на результатах исследований и экспериментов, проведенных еще в 30-е годы советскими учеными Л.И.Мандельштамом, Н.Д.Папалекси и Е.Я.Щеголевым. Импульсный метод также был запатентован в СССР инженером Э.М.Рубчинским еще в 1938 г. Однако впервые широко применяться для навигации разностно-дальномерные системы стали за рубежом.