

7. Применение угломерно-дальномерных радионавигационных систем
7.1. Общие сведения о удрнс
Угломерно-дальномерными радионавигационными системами (УДРНС) называют такие системы, которые позволяют одновременно измерить два навигационных параметра – пеленг и дальность. В данном учебном пособии уже описано, каким образом пеленг и дальность можно использовать для навигации по отдельности, поэтому ничего принципиально нового в их совместном применении не имеется. С помощью УДРНС можно выполнять полет на или от РНТ, осуществлять контроль пути по направлению и дальности, определять место самолета.
Достоинством УДРНС является то, что одна и та же система дает сразу два параметра, что и необходимо для определения МС. Одной из линий положения является ЛРПС в форме ортодромии, а второй – ЛРР в виде окружности (рис. 7.1).
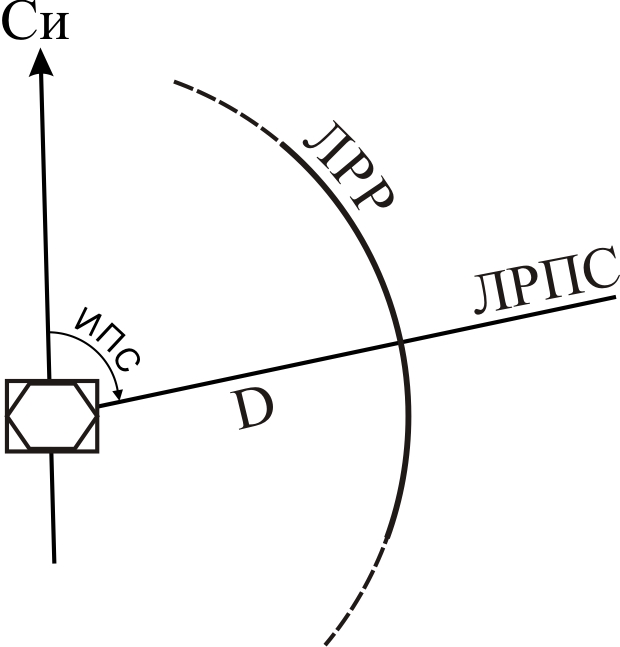
Рис. 7.1. Определение МС с помощью УДРНС
При этом ЛРР на карте наносить нет необходимости. Ведь нужна не сама линия положения, а только точка ее пересечения с ЛРПС. Поэтому на практике ЛРР на карте не изображают, а просто откладывают вдоль ЛРПС измеренное значение дальности. Точность определения МС зависит от точности измерения пеленга и дальности, погрешностей графической работы на карте. Если точки, от которых отсчитываются пеленг и дальность. совпадают, то угол пересечения этих двух линий положения всегда равен 90º, где бы ни находилось МС. Это обеспечивает наилучшую точность при прочих равных условиях.
К УДРНС можно отнести все системы, с помощью которых можно получить пеленг и дальность, например:
- радиотехническая система ближней навигации (РСБН);
- VOR/DME (радиомаяки VOR и DME, расположенные в одном месте);
- TACAN;
- наземные радиолокационные станции кругового обзора.
7.2. Аналитический способ определения частноортодромических координат с помощью удрнс
«Классическим» способом определения МС с помощью любой УДРНС является способ, основанный на прокладке линий положения на карте. Однако он имеет значительные недостатки. Во-первых, работать на карте в кабине современного самолета не очень удобно, особенно при отсутствии в составе экипажа штурмана и предназначенного для такой работы штурманского столика. Во-вторых, работа на карте требует времени и аккуратности, которые не всегда имеются, особенно в непростых условиях полета. В-третьих, графическая работа на карте всегда сопровождается случайными погрешностями при измерении углов транспортиром и расстояний линейкой. Эти погрешности могут «свести на нет» высокую точность навигационной системы. Например, пеленг измерен с точностью 0,1º , но проложить его на карте транспортиром пилот вряд ли сможет точнее, чем до 1º.
Оперативность и точность определения МС можно повысить, если не использовать карту, по крайней мере, во время полета. Рассмотрим, каким образом это можно сделать.
Можно обратить внимание на то, что пилоту, выполняющему полет по маршруту, нет особой необходимости знать МС именно как точку на карте. Ему достаточно знать линейное боковое уклонение от ЛЗП и пройденное или оставшееся расстояние от ППМ. Этого вполне достаточно для того, чтобы выполнить полет. А знать, над какой деревней он сейчас пролетает, нет особой необходимости.
Таким образом, пилоту нужно знать не МС как точку, а координаты этой точки, причем, желательно в частноортодромической системе координат.
Напомним, что в частноортодромической системе координат ее оси являются двумя перпендикулярными ортодромиями. Система координат называется частноортодромической, поскольку для каждого участка маршрута она своя. Одна из осей (ось S) направлена по ЛЗП в направлении полета, а вторая (ось Z) перпендикулярно к ней вправо. Точка пересечения этих осей находится либо в начальном ППМ участка, либо в конечном. Если используется первый из указанных вариантов, то координата z воздушного судна представляет собой ЛБУ, а координата s – пройденное расстояние от начального ППМ (рис. 7.2).
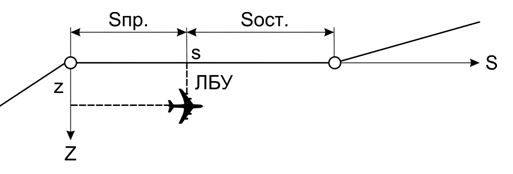
Рис. 7.2. Частноортодромическая система координат
Предположим, что в стороне от ЛЗП расположен радиомаяк УДРНС (неважно, какой именно). Задача состоит в том, чтобы по измеренным от этого радиомаяка пеленгу П и дальности D, определить линейное боковое уклонение z и пройденное расстояние s без помощи карты, то есть расчетным путем.
Для решения этой задачи необходимо знать еще и частноортодромические координаты самого радиомаяка (в системе координат, связанной с этим участком маршрута). Эти координаты zp и sp в простейшем случае могут просто измерены линейкой на карте (рис. 7.3). Но в принципе, чтобы избежать погрешностей при их измерении, zp и sp могут быть рассчитаны по формулам сферической тригонометрии с высокой точность на калькуляторе еще заранее, до полета.
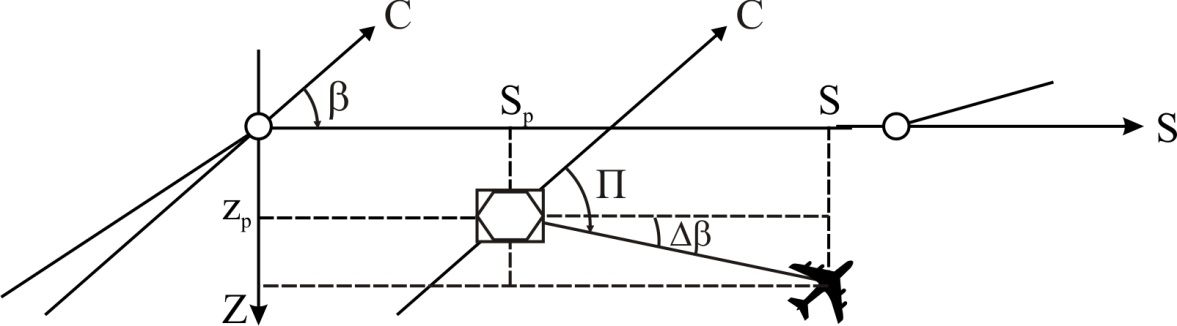
Рис. 7.3. Аналитический способ определения координат
Также необходимо знать заданный путевой угол β участка маршрута, причем от того же меридиана, от которого отсчитывается измеренный пеленг.
Тогда, обозначив Δβ=П─β, получим (см. рис. 7.3):
z=zp+D sin Δβ,
s=sp+D cos Δβ.
Разумеется, каждая из входящих в эти формулы величин (кроме дальности), может быть как с плюсом, так и с минусом. Вот, собственно, и вся теория данного вопроса.
Конечно, на практике в полете расчет на калькуляторе можно выполнить непосредственно по этим формулам. Но при использовании НЛ-10 можно посоветовать более удобный вариант этого же расчета.
Заранее, например, еще во время предварительной подготовки к полету, можно определить те величины, которые будут оставаться неизменными в каждом полете на данном участке. Для этого можно на карте отметить траверз радиомаяка (рис. 7.4). Траверзом называется точка на линии пути, являющаяся основанием перпендикуляра, проложенного от радиомаяка на эту линию пути (точка Тр на рис. 7.4).
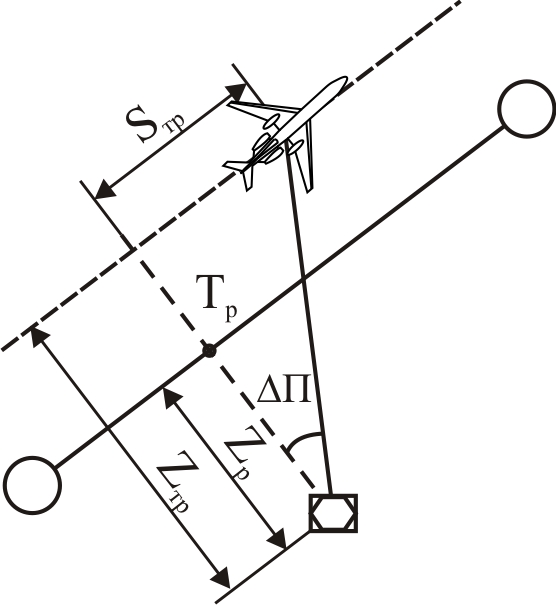
Рис. 7.4. Величины, используемые при расчете координат
Путем измерения или расчета нужно определить zp (расстояние от радиомаяка до ЛЗП), а также расстояния от траверза до начального и конечного ППМ.
Кроме того, нужно измерить или рассчитать пеленг траверза радиомаяка (угол между северным направлением меридиана радиомаяка и направлением на траверз). Если достаточна точность до одного градуса, то проще не измерить, а рассчитать. Ведь направление пеленга на траверз перпендикулярно направлению самой ЛЗП, следовательно, Птр отличается от заданного путевого угла β ровно на 90° (больше или меньше на 90° – нетрудно сообразить, помня, что значения всех направлений увеличиваются при повороте по часовой стрелке). Важно не забывать, что Птр, а, следовательно, и β, с помощью которого он рассчитывается, должны быть от того же меридиана, от которого выдает пеленг данная УДРНС.
Рассчитанные значения Zp, Птр и расстояния от траверза до ППМ можно нанести карандашом на карту. Все эти операции достаточно проделать один раз, а затем в каждом полете их использовать.
В полете на данном участке маршрута, в любой момент когда измерены значения текущего пеленга самолета П и дальности до радиомаяка D, нужно проделать следующие нехитрые операции.
1) Определить, на сколько градусов отличается текущий пеленг П от пеленга траверза Птр:
ΔП=│П-Птр│.
Эту величину достаточно рассчитать просто по модулю. Ее знак свидетельствует просто о том, где находится самолет - еще не долетел до точки траверза или уже перелетел ее. Но ведь этот вопрос легко решить просто по самому значению П и пользуясь наглядным представлением. Например, если во время полета П увеличивается (так будет, если радиомаяк справа от ЛЗП), но еще не достиг значения Птр, то самолет до траверза еще не долетел.
2) Рассчитать величины, которые условно обозначим zтр и sтр:
zтр=D cos ΔП,
sтр= D sin ΔП.
Это легко сделать на НЛ-10 по ключу умножения числа на синус и косинус угла.
3) Для окончания решения этой задачи нужно просто понимать смысл рассчитанных величин.
Величина Sтр – это расстояние от ВС до траверза, измеренное вдоль ЛЗП (см. рис.7.4). Если самолет еще не долетел до траверза, то Sтр - это сколько до него осталось, а если уже пролетел траверз – то сколько уже от него отлетел. Поскольку на карте уже надписаны расстояния от траверза до обоих ППМ, то определить пройденное или оставшееся расстояние не составляет труда.
Величина zтр – это боковое расстояние от ВС до радиомаяка (по направлению, перпендикулярному ЛЗП). Если бы ВС находилось на ЛЗП, то zтр равнялось бы zр, которое также надписано на карте. Если zтр больше, то ВС находится дальше от радиомаяка, чем ЛЗП, и наоборот. На основе этого легко определить, в какую сторону уклонилось ВС и на какую величину.
Все эти операции долго описывать на бумаге, но поняв и освоив их, можно одним движением линейки определить и ЛБУ, и Sпр, и Sост.